
Fターム[5J070BG01]の内容
レーダ方式及びその細部 (42,132) | 表示 (572) | 表示媒体 (216)
Fターム[5J070BG01]の下位に属するFターム
Fターム[5J070BG01]に分類される特許
101 - 120 / 158
マット位置表示システム
【課題】本発明は、マット内にGPS位置情報及びICタグ情報を取り入れ、各情報を送信可能な信号処理をしてアンテナを介して送信させ、基地局では専用受信機で受信し、それら各情報をパソコン画面に表示できるマット位置表示システムを提供する。
【解決手段】本発明のマット位置表示システムは、衛星から送信されるGPS位置情報を電柱や屋上などに取り付けられたアンテナにより得て、重要拠点のマット内にあるGPS機器類にGPS位置情報を送り、一方重要拠点のマット内に仕組んだICリーダーによりマット上を通行したICタグを装備した人又は物のICタグ情報を得て、マット内部にあるGPS機器類に入力し、GPS情報とICタグ情報を送信可能な電波にミキシングをして、同軸ケーブルよりアンテナを介して送信させ、基地局では専用受信機で受信し、それら各情報を電子的に分けてパソコン画面に表示できるものである。
(もっと読む)
危険な対象および物体を検出するためのシステムおよび方法
危険な対象および物体を検出するためのシステムおよび方法が開示される。一実施形態に従って、方法は、マイクロ波信号を生成することを包含し、このマイクロ波信号は、標的によって反射され、1つ以上の反射信号となる。1つ以上の反射信号は、アンテナアレイで受信される。1つ以上の反射信号は、デジタル反射信号に変換される。マイクロ波信号は、デジタル信号に変換される。デジタル反射信号およびデジタル信号は処理され、標的の三次元位置を決定する。デジタル反射信号およびデジタル信号は処理され、標的を識別する。デジタル反射信号およびデジタル信号は処理され、標的の状態を決定し、標的が危険な対象であるかどうかを決定する。  (もっと読む)
(もっと読む)
航空管制システム

【課題】プラットホーム上に追尾レーダのみ搭載するような制限のある場合においても、追尾レーダのみで航空管制用のPPI表示を行える航空管制用表示方式を実現する。
【解決手段】空間走査方式がランダムである追尾レーダ10と、この追尾レーダが探知した対象目標の測位時刻及び位置情報をもとに、PPI表示装置の表示更新周期に合わせた前記対象目標の予測位置を算出する時刻整合処理手段20とを備え、前記対象目標の相対位置を前記PPI表示装置40に表示する。
(もっと読む)
精測進入レーダ装置
【課題】空中線の切替方式を簡略された系統にて実現可能な精測進入レーダ装置を提供する。
【解決手段】制御部16において、ビーム走査繰り返しごとに、方位空中線装置13の送信部131及び高低空中線装置14の送信部141それぞれの増幅動作を交互にオン/オフし、信号処理部15の信号処理器153に対しA/D変換器151,152それぞれの出力のうちいずれか1つを選択させるようにして、方位空中線装置13及び高低空中線装置14を交互に切り替えるようにしている。
(もっと読む)
地中レーダ
【課題】レーダ移動方向と直角な方向の探査範囲が広く、レーダ移動方向における分解能が良く埋設物の形状及び埋設位置を容易に把握可能な地中レーダを提供する。
【解決手段】送信アレイアンテナ24により地中に向けて送出する電磁波をレーダ幅方向に走査可能な電磁波送信部20と、電磁波送信部20の電磁波送出方向を可変制御する電磁波送出方向制御部30と、受信アレイアンテナ41で地中からの反射波を受信する電磁波受信部40と、電磁波受信部40の受信信号から反射波到来方向を推定する反射波到来角推定部50と、電磁波受信部40の受信信号から合成開口処理を行う合成開口処理部60と、電磁波送出から反射波受信までの時間を演算する送受信時間演算部70と、表示データを算出する画像処理部80と、表示データを表示する画像表示部90とを備えて構成した。
(もっと読む)
目標類別装置
【課題】特徴量の信頼性の動的な変動を考慮することで、より高精度な区間値ファジィ推論方式による目標類別を可能とする目標類別装置を得る。
【解決手段】目標観測手段101により類別対象の目標が有する特徴量を得て、特徴量と特徴の度合いを表す入力ファジィ区間値とを関連付けたメンバシップ関数106と、メンバシップ関数106の区間の幅として定義できる特徴の曖昧さを特徴量から信頼性算出処理部108により算出された信頼性係数とを用いて、区間値ファジィ化処理部102により目標観測手段101によって得られた特徴量のファジィ化を行い、入力ファジィ区間値を得て、これから推論処理部103により目標種類の確からしさを表す出力ファジィ区間値を算出し、非ファジィ化処理部104によって算出された出力ファジィ区間値から目標種類を確定し、表示装置105に表示する。
(もっと読む)
広帯域レーダ装置及びその移動物体検出方法
【課題】広帯域レーダ装置において、移動物体の位置検出精度を高め、かつ信号を変換するときの計算回数を少なくすることである。
【解決手段】2次元座標上の距離を示す距離設定値を設定する(S13)。設定した距離設定値に応じた角度ステップ(角度間隔)を計算する(S114)。次に、計算により求めた角度ステップに基づいて角度を設定する(S15)。1次元のUWBレーダパルス応答差分信号から、距離設定値と角度により定まる2次元平面上の該当する位置の受信信号強度を計算する(S15)。これにより1次元の信号が2次元のUWBレーダパルス応答差分信号に変換される。
(もっと読む)
目標表示装置及び目標表示方法
【課題】目標対象を効率良く探知することを可能とする。
【解決手段】目標情報データベース12aには、探知目標入力装置により探知された目標対象の目標情報が記憶される。CPU11は探知する目標対象の種類と探知期間とを指定する探知条件にしたがって目標情報データベース12aから目標情報を抽出する。この抽出された目標情報に基づいて、CPU11は目標対象の探知頻度を表す重複度を算出して重複情報データベース12bに記憶する。そして、CPU11は、重複情報データベース12bに記憶された重複度をもとに目標分布を作成し、目標分布を包含する地図情報を地図データ12cから読み出し、目標分布を地図上に重畳したデータを表示出力I/F16から出力する。
(もっと読む)
船舶用レーダ
【課題】搭載される船舶の動揺に応じて変化するレーダアンテナの姿勢変化に起因するアンテナ方位角の誤差による問題を解消して、小型船舶に搭載する場合でも物標の探知精度および追尾精度を確保する。
【解決手段】姿勢角センサ2は船体のローリング角およびピッチング角をそれぞれ検出し、方位誤差補正部6は船体の進行方向である船首尾方向に平行で且つ正横方向に平行な船体基準面内でのビームの指向方向であるアンテナ方位角と姿勢角(ローリング角,ピッチング角)とに基づいて、アンテナの方位角を水平面に投影した角度を補正アンテナ方位角として求める。レーダ映像データ生成部7および物標追尾部8では、この補正後のアンテナ方位角を用いて処理を行う。
(もっと読む)
リソース管理装置及びそのためのプログラム
【課題】入札処理が時間制約の範囲内で完了するようにリソースの割り当て行なうリソース管理装置を提供する。
【解決手段】リソース管理装置101は、複数のアプリケーションプログラムのそれぞれに対応して設けられ、複数のアプリケーションプログラムのそれぞれが所定の単位時間内に消費または供給するリソースについて、入札値を計算して入札値の情報を生成する複数のリソース応札部102と、複数のリソース応札部102からの入札値の情報に基づいて、所定の単位時間における、複数のアプリケーションプログラムのそれぞれに割り当てるリソースを決定するリソース割り当て処理を行なう入札管理部103と、所定の単位時間において、入札打ち切り条件が満たされるまでリソース割り当て処理が繰り返されるように入札管理部103を管理する繰り返し管理部107とを有する。
(もっと読む)
空港面監視装置
【課題】空港面探知レーダによる空港面監視を、マルチラテレーションの情報を統合することで補完し、効率的で安全な空港管制を実現可能にする。
【解決手段】空港に配置された複数の地上局により、目標が発信する信号を受信し、受信信号の到達時間差から目標の3次元位置情報を算出すると共に、目標の識別情報を得るマルチラテレーションと、3次元位置情報に基づいて目標が空港上空を低高度で飛行しているか、飛行せず空港面上に在るかの判定を行う目標高度監視装置と、当該判定結果に基づいて空港面探知レーダとマルチラテレーションが算出した目標の位置情報を統合処理し、得られた位置情報に対応する識別情報を付加する統合処理装置と、統合された目標の位置情報と識別情報を、空港面を表す座標上に表示する表示装置を備えたものである。
(もっと読む)
レーダ装置及びレーダ画像表示方法
【課題】異なるパルス幅の信号から得られた画像を同一画面上に同時に表示する場合であっても、すべてのレンジで同じ内容の追尾物標の運動情報を表示できるレーダ装置及びレーダ画像表示方法を提供することを目的とする。
【解決手段】所定の送信パターンで送信した2以上の異なるパルス幅信号を受信し、該受信した同じ送信パルス幅のエコー信号毎に、探知レンジに対応する表示用エコーデータを生成するエコーデータ生成部と、異なる送信パルス幅のエコー信号を用いて、表示用エコーデータと重畳する1つの追尾物標の運動情報を生成するARPA処理部と、前記ARPA処理部で生成された追尾物標の運動情報を、前記表示用エコーデータに重畳する表示出力合成部と、前記表示出力合成部で重畳した画像を表示する表示部とを備えることを特徴とする。
(もっと読む)
制御盤保守システム
【課題】制御盤に実装される電子基板の実装チェックが作業を迅速かつ簡単に行えるようにする。
【解決手段】電子基板31,32a〜32dに貼り付けたRFID4の認識番号及び位置情報を、制御盤2に設置されたリーダ5から読み取り、リーダ5から読み取られたRFIDの認識番号及び位置情報と、保守ツール1内のデータベース及び実装図の情報を、保守ツールにおいて照合して、実装図で指定された位置に指定された型式の電子基板が制御盤2に実装されているかどうかを判定し、判定結果を保守ツールのモニタに表示するようにした。
(もっと読む)
システム航跡測定装置および航跡割当・航跡誤差補正処理方法
【課題】複数のセンサから得られる複数のセンサ航跡を用いて、正確な、センサ航跡の航跡誤差推定、航跡割当およびシステム航跡を生成する。
【解決手段】ローカル航跡とリモート航跡のペアで航跡の組合せを作成し、各組合せの航跡ペアの差分を取って、組合せごとに算出したペアの差分の2乗和の最小値を1つ選択し、その最小値に対応する組合せを航跡割当とし、またペアの差分の2乗の頻度分布の最頻値の中から航跡バイアス誤差分散を算出する航跡割当処理部と、ローカル航跡とリモート航跡の航跡ランダム誤差分散と、航跡バイアス誤差分散に基づいて航跡バイアス誤差を算出する航跡誤差推定処理部と、航跡バイアス誤差分に基づいて補正した補正したリモート航跡とローカル航跡を重み付け統合してシステム航跡を生成する航跡統合処理部を備える。
(もっと読む)
合成開口レーダの画像処理装置及び方法
【課題】 物標を捜索する合成開口レーダにおいて、限られた画素サイズのディスプレイで広域を監視するために、低分解能で画像化した場合でも、高分解能時と同じ小物標探知能力を実現する合成開口レーダの画像処理装置及び方法を提供することにある。
【解決手段】 高分解能処理部1で、小物標4に匹敵するか、若しくはさらに小さい領域まで高分解能処理を実施して、小物標がもつ情報を取得する。次に、最大値フィルタ処理部2で、前記高分解能処理で得られた小物標の情報を、低分解能処理上の1ピクセルに最大値で展開する。そして表示部3で、低分解能処理上の最小領域を1ピクセルとして画面表示する。以上のように、小物標が本来もつ情報を損なうことなく表示可能であるため、背景の情報との識別が容易となり、レーダとしての探知能力を向上させることができる。
(もっと読む)
無線ローカリゼイション装置および方法
デバイスのロケーションは、別のデバイスに対して決定されることができる。例えば、ロケーティングデバイス(102)は、それがターゲットデバイス(104)に対して少なくとも1つの距離を測定するとき、動くことができる。ロケーティングデバイスは、そのあと、測定された単数の距離あるいは複数の距離に関連する1以上のインジケーションを生成することができる。ロケーティングデバイスは、さらに、ターゲットデバイスに対する1以上の決定された方向を関連づける1以上のインジケーションを生成することができる。ターゲットデバイスは、ターゲットデバイスのロケーションを決定するために、あらかじめ決定された方法で、動くことができる。デバイスの各々は、ロケーション決定オペレーションのために、単一のトランシーバ(208、212)および単一のアンテナ(210、214)を使用することができる。 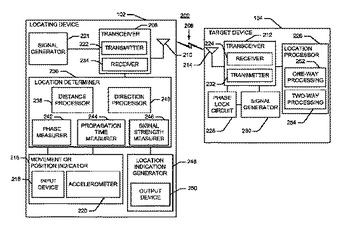 (もっと読む)
(もっと読む)
相手船動静監視装置
【課題】 Bスコープ座標で示される相手船妨害ゾーンの映像と平面座標で示されるレーダ映像との関係が容易に理解できるようにする。
【解決手段】
相手船妨害ゾーンを示す船舶航行支援装置の表示画面1とレーダ装置の表示画面9とは近接して配置される。それらの画面1,9は、VRMとEBLとにより相互に連動するようにされている。
(もっと読む)
情報表示装置及び情報表示システム
【課題】表示対象物の識別を的確に行うことができ、さらにその識別に要するユーザの負荷を低減することができる情報表示装置を提供する。
【解決手段】表示対象物の動作状況を規定する情報を入力する入力部と、表示対象物のシンボルの形状中の部分に動作状況を規定する情報を割り当て、表示対象物の動作状況の変化に応じてシンボルの対応する部分の寸法を変更する処理部とを備える。
(もっと読む)
コンクリート構造物及びそれ以外の構造物の非破壊検査方法
【課題】電磁波を用いた短時間で高精度、高信頼性を有するコンクリート構造物及びコンクリート以外の構造物の非破壊検査方法を提供する。
【解決手段】コンクリート構造物11の表面12に対向して設けた電磁波の送信アンテナ13から電磁波をコンクリート構造物11に向けて発信し、コンクリート構造物11の内部に存在する非コンクリート体15で反射した電磁波をコンクリート構造物11の表面12に対向して設けた受信アンテナ16で受波信号として検出して、コンクリート構造物11の内部の一つ以上の非コンクリート体15で反射した反射波から形成される受波信号の波形と、コンクリート構造物11の内部の一つ以上の非コンクリート体15の存在から理論的及び/又は実験的に予測される予測受波信号の波形とのパターンマッチングを行うことにより、非コンクリート体15の検出を行う。
(もっと読む)
距離表示システムおよび方法
距離表示システムは送信部(214)、その送信部から離間するトランシーバ(216)およびそのトランシーバに対して離間した関係に保持される受信部(214A)を含む。送信部は第一電磁波(EW1)を送信する。トランシーバは第一電磁波を受信し、受信部に第二電磁波(EW2)を送信する。トランシーバは、入力に関して第二電磁波を変調し、送信部とトランシーバとの間の距離(D1)、加速度入力、圧力レベルまたは温度示度といった信号、データまたは情報を伝達するよう作動する。  (もっと読む)
(もっと読む)
101 - 120 / 158
[ Back to top ]