
Fターム[5J070BG01]の内容
レーダ方式及びその細部 (42,132) | 表示 (572) | 表示媒体 (216)
Fターム[5J070BG01]の下位に属するFターム
Fターム[5J070BG01]に分類される特許
121 - 140 / 158
車載センサの補正装置および方法
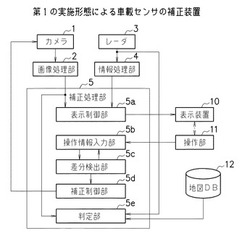
【課題】レーダやカメラといった異なる種類のセンサを併用して周辺物の位置を検出するシステムの出荷後であっても、何れかのセンサに発生した位置ずれを適切に補正可能な「車載センサの補正装置および方法」を提供する。
【解決手段】カメラ1の撮影画像に対して画像認識処理を行うことで、撮影画像内における周辺車両のピクセル位置を検出する画像処理部2と、レーダ3により検出された周辺車両の位置を撮影画像内におけるピクセル位置に換算する情報処理部4と、両ピクセル位置の差分がなくなるような補正量を求め、この補正量に従ってカメラ1の向きを補正する補正処理部5とを設け、車両の走行中におけるレーダ3の検出結果に合わせてカメラ1の向きを補正することにより、システムの出荷後であっても、任意のタイミングで、カメラ1に発生した位置ずれがなくなるようにカメラ1の向きを適切に調整できるようにする。
(もっと読む)
レーダ画像処理装置、レーダ画像識別方法およびレーダ画像識別プログラム

【課題】 レーダ画像においてアジマス方向に大きさが変化する移動体を識別する。
【解決手段】 レーダ画像表示部110は被識別情報データベース192からレーダ画像データを取得し入出力端末191に画像を表示する。構造物指定処理部120は表示した画像に基づいて利用者が入出力端末191から指定したレーダ画像上の構造物の位置を取得する。構造物画像位置算出部130は指定された構造物の位置情報に基づいてレーダ画像上の構造物間の距離の絶対値を算出する。構造物相対位置算出部140は構造物間の距離の絶対値に基づいてISAR画像上の構造物間の相対距離を算出する。地物識別部150は既知地物情報データベース193から既知である地物が有する構造物間の相対距離を取得してレーダ画像上の地物が有する構造物間の相対距離と比較してレーダ画像上の地物を識別する。
(もっと読む)
レーダ画像処理装置、構造物高さ算出方法、レーダ画像識別方法、構造物高さ算出プログラムおよびレーダ画像識別プログラム
【課題】 レーダ画像上の構造物の高さを算出する。また、レーダ画像上の地物を識別する。
【解決手段】 レーダ画像表示部110は観測情報データベース192からレーダ画像データを取得し入出力端末191に画像を表示する。下端線指定処理部120と上端点指定処理部130は表示した画像に基づいて利用者が入出力端末191から指定したレーダ画像上の構造物の下端と上端とを取得する。高さ登録処理部140は、まず、指定された構造物の下端と上端との間の画素数を算出し、画素数に1画素当りの長さを乗じて構造物の画像上の長さを算出する。そして、画像上の長さとレーダ観測時のレーダの高度などの観測情報とに基づいて構造物の実体の長さを算出する。地物識別部160は、既知地物情報データベース193から既知である地物の構造物の高さを取得してレーダ画像上の構造物の高さと比較して構造物を有するレーダ画像上の地物を識別する。
(もっと読む)
移動体管理システム及び移動体装置
【課題】任意の位置における移動体の向きを確実に把握する。
【解決手段】ショッピングカート2は、切換え部31により第1のアンテナ32を選択している状態でこの第1のアンテナから電磁波を放射し、第1のアンテナの通信エリア内の商品陳列棚に配置された位置タグと無線通信を行って位置コードを取得する。そして、取得した位置コードと第1のアンテナの配置位置を無線通信部23から通信用アンテナ29を介してサーバ1に送信する。サーバはデータベース15から位置コードに対応した位置座標を読出し、この位置座標と第1のアンテナの配置位置の関係から、ショッピングカートの現在位置及び進行方向を判断する。そして、判断した現在位置及び進行方向をショッピングカートに送信する。ショッピングカートは現在位置及び進行方向をサーバから受信し、表示部26に表示して知らせる。
(もっと読む)
周辺監視センサユニットおよび周辺監視センサシステム
【課題】自動車の周辺状況を検知して、周辺状況の変化に伴って適切な安全運転支援を行うことができる周辺監視センサユニットを提供する。
【解決手段】自動車の周辺監視画像を撮像するイメージセンサと、撮像の対象物を検知する対象物検知センサと、前記イメージセンサによって撮像された画像情報を通信線側に出力する画像出力手段と、前記対象物検知センサが対象物を検知するときに前記イメージセンサおよび/または画像出力手段の動作状態を切り替えることにより対応するイメージセンサによって撮像されたより鮮明な画像情報を出力させる状態切替手段とを備えてなることを特徴とする周辺監視センサユニットを提供している。
(もっと読む)
航空交通制御システムに用いられる情報処理装置
【課題】本来のシステムによる警報出力が不能な状態となったとしても、簡易方式によって警報監視を継続して警報出力することを可能にする。
【解決手段】情報処理装置14において、レーダ装置10からレーダ情報を取得するレーダ情報取得部21を設ける。制御部20は、レーダ情報取得部21により取得されたレーダ情報をもとに、航空機と同航空機に対して衝突の可能性がある対象物の位置を表示制御部35を通じて表示装置37において表示させる。衝突判定処理部24は、制御部20により表示される航空機と対象物の位置とが重なるか否かに基づいて航空機の対象物に対する衝突の可能性を判定する。制御部20は、衝突判定処理部24により衝突の可能性があると判定された場合に警報を出力する。
(もっと読む)
アンテナ・トランシーバー・システム
音声、デジタルデータ、レーダー信号およびIR信号を送信し受信し、そして処理するアンテナ・トランシーバ−・システム100が提供される。本システム100は、複数の放射素子110,112,114を有するアンテナアレイ102を含んでおり、各素子110,112,114は、送受信(T/R)モジュール104,106,108に接続されている。各T/Rモジュール104,106,108は、入力信号のビームパスに沿ってリターン信号を送信する位相器200,202,204と位相共役モジュール206,208,210を含んでいる。本システム100は、コンパクトなタイル400に統合されている垂直に整列されている複数の平面402に配置されている。本タイル400は、ユーザのヘッドギア500中に埋め込まれており、システムのハンドフリーな操作が可能となる。代わりに、本システム100は、車両700、人間が持ち運びできるバックパック800、または他の指定されたプラットフォームに統合することもできる。 (もっと読む)
レーダ情報処理装置
【課題】複数の航空機に対する情報ラベルをレーダ画面中に表示する場合であっても、情報ラベル中の情報を常に確認しやすい状態にする。
【解決手段】レーダ情報処理装置14の制御部20は、入力装置33から入力される指示に応じて、情報ラベルにおける文字の文字サイズを設定する。ラベル表示制御部28は、設定された文字サイズに応じて、情報ラベルの表示画面中におけるサイズを設定し、この設定された複数の情報ラベルが表示画面中で重なるか否かを判定する。ラベル表示制御部28は、情報ラベルが重なると判定された場合に、情報ラベルの位置を所定の条件に従って重なりを回避することができるように変更して制御部20に通知する。制御部20は、変更された位置に情報ラベルをレーダ画面に表示させる。
(もっと読む)
無線タグ探索方法および装置
【課題】
無線タグの位置の探索を支援する。
【解決手段】
無線タグの位置を探索する際に、無線装置は無線タグに対してID番号の送信を要求する。無線タグが送信した電磁波を受信した無線装置は、電磁波の受信強度と、無線装置のアンテナの受信特性と、物体に取り付けられた状態における無線タグの送信特性と、空間を伝搬する電磁波強度と伝搬距離との関係を表す計算式に基づいて、無線装置から無線タグまでの距離や方向を推定し、その推定位置を無線タグのID番号と関連付けて表示する。複数回の探索により無線タグの位置を特定するため、無線装置の向きを指示し、各探索で推定された推定位置の重なりを表示する。
(もっと読む)
施設利用者管理装置、利用者側端末装置、対象物管理装置、施設利用者管理プログラム、利用者側端末プログラム、対象物管理プログラム
【課題】迷子の子どもを捜している親が複数ある場合でも、確実に自身の迷子になった子どもの情報を得られるなど、施設利用者が関連付けて管理されている他の施設利用者の位置情報を迅速且つ確実に得られる管理装置を提供する。
【解決手段】複数の施設利用者が携帯するそれぞれの携帯型記録手段からの識別情報を関連付けて管理する関連付け情報管理手段と、1の携帯型記録手段の識別情報を用いた他の携帯型記録手段の現在位置の問合せがあった場合、前記関連付け情報管理手段から1の携帯型記録手段に記録の識別情報と関連付けて管理されている識別情報を抽出する抽出手段と、抽出した識別情報についての現在の位置情報を取得する位置情報取得手段と、前記位置情報取得手段で取得の現在位置情報を、関連付けられている他の施設利用者の現在位置情報として、1の携帯型記録手段を携帯する施設利用者に出力する位置情報出力手段とを備えた。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法
【課題】応答信号の受信異常の有無を通知することが可能な二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法を提供する。
【解決手段】応答信号を解読し、これが正常な信号であるか否かを判定する信号解読部18と、応答信号の全ての内容及び判定の結果を時刻と共に表示する表示部23と、判定の結果を時刻と共に記録する記録部21とを設ける。
(もっと読む)
移動体の探索システム
【課題】 システム利用時における利用者の負担を軽減すると共に、付帯情報の管理も行うことができる迷子探索システム等を提供する。
【解決手段】 迷子探索システムSは、固有のID情報が付与された無線タグ10、検出ゲート21に取り付けられたリーダライタ20、該リーダライタ20とデータ通信可能に接続されたサーバ装置30、このサーバ装置30から位置情報の配信を受ける情報端末機としての情報提供端末機40及び携帯電話機50を備える。サーバ装置30は、子供等に保持される無線タグ10のID情報と、その保護者に対して割り当てられる一意の管理符号とを関連付けた管理情報を保有し、リーダライタ20の設置位置情報と、各リーダライタ20が検出した無線タグのID情報から子供等の位置情報を生成し、該位置情報を、情報提供端末機40又は携帯電話機50へ配信する。
(もっと読む)
イベント捕捉およびフィルタリングシステム
【課題】 関心イベントを決定するために検出されたイベントをフィルタリングするシステムおよび方法を提供する。
【解決手段】 検出されたイベントを識別し、センサデータを評価して各イベントに関連する少なくとも1つの特性を決定し、複数の検出されたイベントとそれらの関連する特性とを報告する。少なくとも1つの関連イベント発生部が、少なくとも1つの関連イベントを生成し少なくとも1つのイベント報告を生成するように動作可能である。所与のイベント報告は、関連イベントに関連する少なくとも1つの特性を提供する。イベントフィルタリングシステムが、少なくとも1つのイベント報告を検出されたイベントと比較することにより、複数の検出されたイベントの中の少なくとも1つの関連イベントを識別する。
(もっと読む)
埋設された長尺物体の探査装置および探査方法
【課題】被探査領域に埋設された合成樹脂管等の長尺物体を探査するための探査装置および探査方法を提案する。
【解決手段】本発明に係る探査装置(1)は,演算手段(7)および表示手段(8)を有する評価ユニット(6)を具え,さらに,被探査面(F)に沿って移動可能であり,かつ,探査経路センサ(10)と,アンテナ(12a)が設けられた送受信ユニット(11a)とを有する手持ち式の探査ヘッド(9)を具える。前記アンテナは,被探査面(F)内で相互に離間して配置された少なくとも2個のアンテナ(12a,12b)を含み,これらアンテナ(12a,12b)の被探査面(F)内における間隔が5cm〜50cmの範囲内に設定されている。
(もっと読む)
車両の距離測定システムの距離測定データを評価するための方法および装置
本発明は、車両の距離測定装置の距離測定データを評価する方法に関する。車両の、観察される周囲環境のカメラ画像(100)を得て、距離測定装置によって、観察される同じ周囲環境から、距離測定データを得る。カメラ画像(100)を表示装置に表示し、距離測定データに従って、距離情報(1a´,1b´,2´)をカメラ画像(100)に統合する。本発明によれば、車両の経路(4a,4b)を確定し、場合に応じて、カメラ画像(100)に統合する。 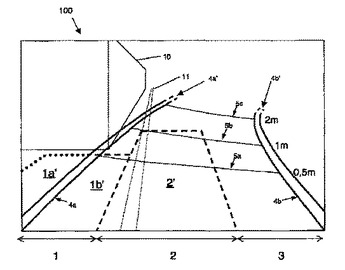 (もっと読む)
(もっと読む)
レーダ装置、ターゲット検出方法、距離表示方法、ターゲット検出プログラム、距離表示プログラムおよびそのプログラムを記録した記録媒体
【課題】ターゲットまでの距離にかかわらず誤検出率と検出確率を一定に保つことを可能とする。
【解決手段】レーダ装置1は、受信波を増幅してパルスを復調し、その振幅レベルを求め、時間窓の位置を設定して、時間窓を生成し、設定した時間窓の位置に応じて決まるターゲットまでの距離Rを求める。また、SNRが一定となるパルス同期加算回数Xを求め、Pn を一定とするような閾値をXの値に応じて設定し、復調されたパルスのうち、設定された時間窓の時間区間内にあるパルスの振幅レベルをX回パルス同期加算し、パルス同期加算後のパルスの振幅レベルと設定した閾値との比較結果により、ターゲットを検出したかを判断する。ターゲットを検出しなかった場合は、時間窓の位置を更新し、ターゲットを検出した場合は、ターゲットまでの距離Rの情報をディスプレイ22上に表示する。
(もっと読む)
レーダ装置とその風速観測方法
【課題】 観測覆域を狭めることなく観測できる風速の上限を高くする。
【解決手段】 レーダ覆域を所定の距離で2つの領域に区分し、近距離の領域については期間A及び期間A′の送信パルスで生成した送信信号(以下、モードA)、その外側の領域については期間B及び期間B′の送信パルスで生成した送信信号(以下、モードB)を用いる。そして、水平方向の一回転毎にモードを切り替え、信号処理装置16にて近距離側領域の観測結果と遠距離側領域の観測結果を別々に得て、両者を合成する。すなわち、モードAでは近距離側領域のみ観測可能で、その外側の領域の観測は不能であり、逆にモードBでは近距離側領域は観測不能であるがその外側の領域は観測可能である。そこで、両者の観測結果を合成することで、レーダ覆域に観測不能領域がなくなり、レーダ覆域全体の観測が可能となる。
(もっと読む)
目標特定評価装置
【課題】目標のRCSの距離、向きによる変化から、特定結果を判定し、電波データなどでは絞り込めなかった、複数の目標の特定結果を絞り込み、確度の高い特定結果を可能とする目標特定評価装置を得る。
【解決手段】任意のシナリオに基づき複数の疑似的な目標を発生する疑似目標発生部25と、電波探知装置等の覆域を算出する覆域評価部26と、探知した目標の電波目標データ等を作成する目標探知模擬部100と、距離−RCSデータ等と目標特定結果の対応関係を格納するデータベースを作成するデータベース作成部33と、電波目標データ等をデータベースと比較・照合することにより目標を特定する目標特定部39と、特定結果を更新する特定結果評価部40と、特定結果を表示する結果表示部42と、特定結果を統計的に処理する特定結果処理部38と、特定結果の処理結果に基づきデータベースを更新するデータベース更新部43を設けた。
(もっと読む)
レーダ装置
【課題】 本発明は、送受信部のレーダアンテナに付着した雪、泥などの汚れに起因したアンテナ感度の低下を精度良く判定できるスキャン式レーダ装置を提供する。
【解決手段】 所定の角度で順次ビームをスキャンして送信するレーダアンテナを有し、送信されたビームが前方のターゲットから反射された反射波を該レーダアンテナで受信して、ターゲットを検出するスキャン式レーダ装置において、ターゲットからの反射波信号のレベルに基づいてアンテナ感度が低下したか否かの判断を行うが、検出されたターゲットが、例えば、オートバイ等のように、検出される幅が狭い場合、或いは、元々反射波信号レベルが低い場合には、反射波信号のレベルが低くても、アンテナ感度が低下したと判定しないようにした。
(もっと読む)
121 - 140 / 158
[ Back to top ]