
Fターム[5J084AA04]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 位置、座標 (319)
Fターム[5J084AA04]に分類される特許
61 - 80 / 319
レーダ装置
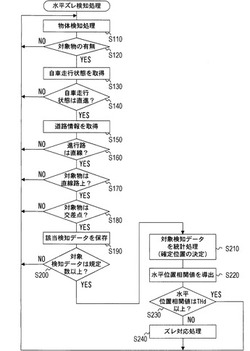
【課題】車幅方向中心から離れた位置に設置するレーダ装置において、レーダ装置の設置位置が基準設置位置からズレたか否かを検出すること。
【解決手段】レーダ装置は、自車両の前部において、自車両の車幅方向中心から離れ、かつ、規定角度範囲の中心軸が自車両の車幅方向の中心軸と自車両の前方にて交差するように、検知基準軸と設置基準軸との関係が規定された基準設置位置に固定して使用される。そのレーダ装置では、物体検知処理を実行する(S110)ことで生成した検知データの中から、抽出条件に合致する対象検知データを特定する(S120〜S200)。そして、複数の対象検知データによって表される水平確定位置を水平基準データに照合した結果が、判定基準値Thd未満であれば(S230:NO)、検知基準軸にズレが生じているものと判定して、ズレ対応処理を実行する(S240)。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム

【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】参照用光源から出射された参照光が検出光出射空間に漏れてしまうことを防止しつつ、光検出器での参照用光源の検出強度を適正なレベルに抑えることができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、対象物体により反射した検出光L3の一部を光検出器30により受光した結果、および検出対象空間10Rを介さずに光検出器30に入射した参照光Lrの強度に基づいて対象物体Obの位置を検出する。光検出器30と、参照光Lrを出射する参照用光源12Rとは、受光ユニット35を構成しており、参照用光源12Rから出射された参照光Lrが検出対象空間10Rに漏れることを回避する。受光ユニット35では、参照用光源12Rから出射された参照光Lrを、強度を低下させた状態で光検出器30に入射させるため、光検出器30での参照光Lrの検出強度のレベルを低く抑えることができる。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】自身から射出された光波を反射した物体までの距離を測定する距離測定装置において、受光部に高感度な受光素子を用いても外乱光の入射を抑制することができる技術を提供する。
【解決手段】レーダ制御部は、発光部による光波の射出後、所定の測定領域内での反射波を検出可能な時間範囲内だけ受光部に光波を入射させるよう制御する(S220,S230,S250,S260)。そして、レーダ制御部は、受光部による出力に基づいて光波を反射した物体までの距離を演算する(S240)。このようなレーダ装置によれば、所定の測定領域内での反射波を検出可能な時間範囲以外では、受光部が光波を入射させないようにすることができる。よって、反射光の光量を抑制することなく外乱光の入射を抑制することができ、良好に物体までの距離を測定することができる。
(もっと読む)
レーザートラッカー
【課題】 距離により最適なサーボゲインが異なるレーザートラッカーの制御において、距離情報を用いて、サーボゲインを最適な値にすることができるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、ターゲットTgにレーザービームLbを照射するレーザー光源2と、同レーザービームを直交する2軸回りにそれぞれ角度調整可能な角度調整手段3と、反射光を受光する受光部7と、照射するレーザービームLbと受光した反射光とからターゲットTgまでの距離を測定する測定手段4と、受光部7で認識された位置情報から可変ゲイン設定部に設定されたゲインに基づいて、角度調整手段3による角度を制御する制御手段5とを設ける。さらに測定手段4で測定した距離に反比例したゲインを求めて可変ゲイン設定部に設定するゲイン指令手段16を設けた。
(もっと読む)
移動体方向検知装置
【課題】移動体の方向を更に正確に2次元的に検知する移動体方向検知装置を提供する。
【解決手段】所定時間間隔をおいて周波数の異なる複数のパルスレーザ光を移動体に向けて照射し、移動体及びその背景からの反射光を受光する直線状のスリットに対して垂直方向に往復駆動されるマスクと、このマスクを通過した光を分光し、2次元に配列された複数の光センサ素子から成り、分光された光を受ける2次元センサと、スリットの行方向の各波長の光の強度累計値を求め、背景からの光から識別できるパルスレーザ光の反射光を検知し、マスクの往復駆動の方向と直角な方向の2次元センサにおける光センサ素子の列の受光強度の累積値によりパルスレーザ光の波長の強度の最大な列を求め、求められた強度最大列及び検知された反射光の最も強度の大きい累積値が得られるマスクの往復の位置及びこの往復の方向に対して垂直な2次元センサの位置により移動体の方向を検知する。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
レーザ測定装置
【課題】レーザ光が規定方向に照射される回動位置を正確に「基準位置」として設定することができ、その基準位置に基づいて検出物体の相対位置をより精度高く算出し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置1は、検出される距離値が所定の距離条件を満たし、且つ検出される受光量が所定の受光量条件を満たす回動位置を「基準位置」として検出する「基準位置検出手段」と、「基準位置検出手段」によって検出された「基準位置」を基準とする偏向部41の相対的な回動位置を検出する「相対位置検出手段」と、フォトダイオード20(受光手段)によって反射光が受光されたとき、「相対位置検出手段」による相対的な回動位置の検出結果に基づいて検出物体の方向を検出する「方向検出手段」とが設けられている。
(もっと読む)
ビーム光投受光装置
【課題】同軸系タイプのビーム光投受光装置のコンパクト化及び組立て調整作業の容易化を図る。
【解決手段】光源210からスキャンミラー240に向かう投光ビームの光路と、対象領域内の物体から反射しスキャンミラー240から受光素子260に向かう戻り光の光路を分離する投受光分離部材を、1つのプリズム230で形成し、プリズム230は、投光ビームをスキャンミラー240方向に反射する反射領域231(外側反射面)と、スキャンミラー240からの戻り光を透過する透過領域232と、この透過領域232を透過した戻り光をプリズム内部で受光素子260方向に反射する内側反射面Dと有する構成である。
(もっと読む)
レーザスキャナ及びその製造方法
【課題】レーザスキャナにおいて角度の監視を簡単且つ確実に行うことができるようにする。
【解決手段】監視領域20にある物体を検出するためのレーザスキャナ10であって、発射光線16を出射するための発光器12、前記発射光線16を前記監視領域20へ向けて周期的に偏向させるための回転可能な偏向ユニット18、監視領域20にある物体により拡散反射された光線22から検出信号を生成するための受光器26、及び、角度単位形成体32を有し、前記偏向ユニット18の角度位置を検出できる角度測定ユニット32、34、38を備えるレーザスキャナ10において、前記偏向ユニット18を前記角度単位形成体32と一体的に構成する。
(もっと読む)
レーザレーダ装置
【課題】高速処理が可能なレーザレーダ装置を提供できる。
【解決手段】前方に出射したレーザ光に対して反射光の光量が所定値より小さい領域においては光走査速度を標準値より下げて検出を行い、反射光の光量が所定値より大きい領域においては光走査速度を標準値より上げて検出を行う。領域においては光走査速度が標準値より遅くなっているため、ある同じ角度範囲幅においての反射光の積算回数を、角度分解能を下げることなく基準回数より増加させることができる。これにより、歩行者など反射光量の小さい物体を感度よく検出することができる。一方、反射光の光量が大きい領域においては、光走査速度が標準値より速くし、ある同じ角度範囲幅においてのパルスの積算回数は基準回数より少なくするが、元々十分な反射光量が得られているため問題なく正確な距離・方向の検出は可能である。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】第1の視点から得た測定対象物の三次元点群位置データに基づき三次元モデルを形成し、この三次元モデル上において、第2の視点から見た測定対象物の撮影画像との共通部分を指定する。次いで、上記共通部分において、対応点となる特徴点を算出し、対応点を指定する。そして、この指定された対応点に基づいて、第1の視点から得た三次元点群位置データを扱うための座標系に関連付けた第2の視点の三次元位置を算出する。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】目標に対して精度よく光波を照射し得る。
【解決手段】実施形態によれば、照射部にて移動目標に対し光波を照射し、光波の反射光を撮像部にて受光して撮像視野内の移動目標に関する画像情報を得て、この画像情報に基づいて駆動部にて光波の照射方向と移動目標からの光波の反射方向とを一致させるべく照射部及び撮像部を駆動して移動目標を追跡する目標追跡装置において、照射部から光波の照射方向に対応する照射部の姿勢情報を取得する取得手段と、この取得手段で得られた姿勢情報と、撮像部で得られる画像情報とに基づいて光波の照射方向と撮像部の指向方向との間の偏向角誤差を算出する演算手段と、この演算手段で求められた偏向角誤差に基づいて、光波の照射方向と撮像部の指向方向との間の偏向角を補正すべく駆動部を制御する制御手段とを備えた目標追跡装置を提供する。
(もっと読む)
物体監視システム及び方法
【課題】複数の認識領域間に渡って物体を認識しながら物体の動きを監視することができるシステムを提供する。
【解決手段】複数に分割された認識領域毎に設置された、レーザセンサの照射により対象とする認識領域の測距データを得る測距手段と、測距手段によって取得された測距データと物体特定データDBに格納された情報を照合することにより、物体のサイズを基に支障物を判定する第1判定手段と、第1判定手段による判定の結果、支障物と判定された物体について、認識データDBに格納された物体のデータと照合することにより、複数の認識領域に渡って移動する物体であって、以前に検知された物体と同一の物体である場合には、認識データDBの該物体に関する測距データを追加し、未検知の物体である場合には、物体に関する測距データを認識データDBに新たに登録し、同一の物体及び新規の物体に関する移動に関する情報について軌跡データDBを更新する。
(もっと読む)
搬送車両および運転支援装置
【課題】パレットに対して搬送車両を進行させるべき方向を運転者が容易に認識できる搬送車両および運転支援装置を提供すること。
【解決手段】周囲状況画面では、搬送車両1の周囲状況として、第1レーダレーダ5A(又は、第2レーダレーダ5B)の走査により障害物が検出されなかった障害物非検出エリアAと、障害物の影となって測定が行えない検知不可能エリアBとが、それぞれ異なる表示態様で表示される。例えば、障害物非検出エリアAと、検知不可能エリアBとが、運転者が区別可能に、別々の色で表示される。これにより、搬送車両1がパレット100の架台部100aの下に進入する場合に、搬送車両1をパレット100の架台部100aの下に進入させることが可能な進入経路を、運転者が容易に見いだすことができるので、パレット100に対して搬送車両1を進行させるべき方向を運転者が容易に認識できる。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離を表す距離情報と、測定点毎の受光量を表す受光量情報と、を取得する光学式距離測定部と、受光量情報において、光量が閾値を超える測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、対象判定部によって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、当該ローカル座標系における位置と、同一の対象物のグローバル座標系における位置とに基づいて、較正を行う較正ステップと、を備える。
(もっと読む)
位置計測方法、位置計測システム、及びプログラム
【課題】トータルステーションと比して簡易な装置を用いて、リアルタイムで被計測物の特徴点の位置を計測できる位置計測方法、及び位置計測システムを提供する。
【解決手段】円柱体であるターゲット30の中心位置を計測する位置計測方法であって、レーザ光をターゲット30上で走査してターゲット30上の複数の計測点までの距離を計測するLRF20から、ターゲット30上における複数の計測点の位置情報を取得するステップと、ターゲット30上における複数の計測点の位置情報と、既知情報であるターゲット30の円周面30B上の円弧部及び中心位置の情報とに基づいて、ターゲット30の中心位置を推定するステップと、を備える。
(もっと読む)
ビーム照射装置
【課題】光検出器からの信号に基づいて検出されたサーボ光の受光位置と理想の受光位置との差分に、迷光や電気的ノイズ等による外乱成分が含まれる場合にも、適正に、レーザ光を目標領域において走査させ得るビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315からの検出信号に基づいて取得されたサーボ光の受光位置と、理想の受光位置との差分を示す差分信号に基づいて、レーザ光が目標領域上の目標軌道を追従するよう、ミラーアクチュエータ100を制御する。また、マイコン7は、差分信号に外乱成分が含まれるエラー期間を検出し、検出したエラー期間において、差分信号に応じて前記レーザ光を前記目標軌道に追従させる制御を停止させる。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
61 - 80 / 319
[ Back to top ]