
危険反応地点記録システム及び運転支援システム
【課題】 実際に車両が道路を走行する箇所の周辺状況に応じて、危険状況の認識をより具体的に行うことができる危険反応地点記録システムを提供する。
【解決手段】 ナビゲーション装置2を制御する車載機本体6において、運転特性記録部18は、生体反応データと車両操作データとを周期的に監視し、生体反応データが平均的な状態から所定値を超えて変化した場合に応じて車両操作データが異常操作と認められるデータを示すと、ヒヤリハット反応が生じたと判定する。そして、ヒヤリハット反応が生じた時点の前後において周辺監視カメラ14により撮像された車両の周辺の動画像を解析し、周辺に存在する移動体及び/又は固定物とを分類し、運転特性記録部18は、分類された移動体及び/又は固定物について車両を基準とする移動速度と移動方向とを検出して車両の位置と共にヒヤリハット情報を記録する。
【解決手段】 ナビゲーション装置2を制御する車載機本体6において、運転特性記録部18は、生体反応データと車両操作データとを周期的に監視し、生体反応データが平均的な状態から所定値を超えて変化した場合に応じて車両操作データが異常操作と認められるデータを示すと、ヒヤリハット反応が生じたと判定する。そして、ヒヤリハット反応が生じた時点の前後において周辺監視カメラ14により撮像された車両の周辺の動画像を解析し、周辺に存在する移動体及び/又は固定物とを分類し、運転特性記録部18は、分類された移動体及び/又は固定物について車両を基準とする移動速度と移動方向とを検出して車両の位置と共にヒヤリハット情報を記録する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者が車両の運転中に危険を感じたと推定される地点を記録するための危険反応地点記録システム、及びそのシステムを利用して構成される運転支援システムに関する。
【背景技術】
【0002】
一般に、車両の運転者は、自らの運転経験や事故警告などの外部の情報に基づいて、道路上の危険箇所の認識を行っているが、このような認識は、運転者の利用頻度が高い道路についてのみ行われる。最近では、車両用ナビゲーション装置が普及したことで走行ルートの選択肢が増加しており、その結果、比較的利用頻度が低い道路を走行する機会も増えている状況にある。従って、道路上の危険箇所の情報をナビゲーション用の地図上に反映させるようにすれば、利用頻度が低い道路をより安全に走行するのに役立つことが想定される。
【0003】
このため、道路上の危険箇所を定量的に把握するように、実証実験レベルでは、車両の走行状態に基づいた危険状態を示す指標の計測が行なわれている。例えば、車両のABS(Anti-lock Braking System)の動作状態や、車両の加減速状態を監視することで、急制動が生じたか否かを判別可能することができる。また、危険箇所を特定するには、生体センサなどを利用して運転者の身体的な状態変化を測定することでも、危険箇所において独特な挙動が生じたことを特定できる。例えば、車両の走行状態については通常走行時における変動の範囲内にあるとしても、運転者の心拍数が急激に上昇したような場合には、所謂「ヒヤリハット」と謂われる危険な状態が発生しているものと推測することができる。
【0004】
例えば、特許文献1には、車両に配置したハンドル角センサ、車軸速度センサ、車間距離センサや、運転者に取付けた脈拍センサ、音声集音マイクなどの出力に基づいて、「急ハンドル」、「急ブレーキ」、「急加速」、「スリップ」、「追突可能性」、「速度超過」、「緊張走行」、「運転者緊張状態」、「興奮状態」、「死亡事故跡」、「事故跡」、「歩行者、自転車注意」「オートバイ注意」、「対向車注意」、「後続車注意」、「視界不良」、「急カーブ」、「その他」等の危険の種類を判定すると共に危険箇所を特定し、地図データに反映させ、その情報を運転者に提供することで安全運転支援に資するようにした技術が開示されている。
【特許文献1】特開2003−123185号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、道路上の特定箇所における危険状況というものは、運転者の修練度合いや車両が実際に走行した場合における周囲環境の状態などによって相対的に異なる。従って、上記のように、例えば「歩行者、自転車注意」「オートバイ注意」、「対向車注意」、「後続車注意」のような通知がなされたとしても、その箇所を実際に走行した場合に、どのように危険な状況が想定されるのかが具体的に把握できず、事前に危険性を予想してその回避を図ることが行い難いという問題があった。
本発明は上記事情に鑑みてなされたものであり、その目的は、実際に車両が道路を走行する箇所の周辺状況に応じて、危険状況の認識をより具体的に行うことができる危険反応地点記録システム、及びそのシステムを利用して構成される運転支援システムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1記載の危険反応地点記録システムによれば、危険反応判定手段は、生体反応データと車両操作データとを周期的に監視し、生体反応データが平均的な状態から所定値を超えて変化した場合に応じて車両操作データが異常操作と認められるデータを示すと、危険反応が生じたと判定する。即ち、運転者が何らかの危険を察知した場合は、そのときの精神状態が生体反応データに反映されると共に、車両操作データにも通常の運転では行われないような急激な変化が現れることが推量されるため、これらに基づき所謂「ヒヤリハット」と称されるような危険反応の発生を判定する。
【0007】
そして、周辺状況解析手段は、危険反応が生じた時点の前後において撮像手段により撮像された車両の周辺の動画像を解析し、周辺に存在する移動体及び/又は固定物とを分類し、危険反応地点記録手段は、分類された移動体及び/又は固定物について車両を基準とする移動速度と移動方向とを検出して、車両の位置と共に記録する。従って、危険反応が生じた場合に、車両の周辺が具体的にどのような状況であったのかを記録することができ、以降に危険反応が生じた地点を走行しようとする場合にその記録データを利用することができる。
【0008】
請求項2記載の危険反応地点記録システムによれば、危険反応判定手段は、車両操作データが示す異常操作データの種類に応じて、危険反応の種類を分類する。即ち、運転者に危険反応が生じた場合における異常操作データの種類が、例えば、ブレーキ操作に関するものであったり、ハンドル操作に関するものであったりすれば、それに応じて反応の種類を「急ブレーキ操作」や「急ハンドル操作」などに分類することができる。従って、危険反応が発生した地点において、具体的にどのような車両操作が行なわれたのかを確認することができる。
【0009】
請求項3記載の危険反応地点記録システムによれば、危険反応地点記録手段は、危険反応が生じた時点に車両が位置している箇所の地図データを地図データベースより取得して記録する。従って、危険反応が生じた地点が、具体的にどのような地形や道路形状であったのか(例えば、直進路、分岐路、三叉路、交差点、一般道路、高速道路、登坂路など)を確認することができる。
【0010】
請求項4記載の危険反応地点記録システムによれば、周辺環境判定手段は、危険反応が生じた時点に取得された環境状態データに基づいて車両周辺の環境状態を判定し、危険反応地点記録手段は、判定された車両周辺の環境状態も記録する。ここで、「車両周辺の環境状態」とは、例えば、雨や霧などの天候に関するものであったり、それに付随する路面の滑り易さの状態などを言う。従って、このような環境状態も記録することで、危険反応が生じた時点における車両周辺の状態がどのようであったのかも併せて確認することができる。
【0011】
請求項5記載の危険反応地点記録システムによれば、通信制御手段は、危険反応地点記録手段によって記録された情報を、通信手段を介して定期的に管理センタに送信する。即ち、各車両毎に収集記録された危険反応地点の情報を管理センタに集めることで、管理センタ側で危険反応地点の記録データベースを作成することが可能となる。そして、管理センタに集められた情報を、必要に応じて車両に配信するようにすれば、個別に収集された情報を統合して有効に利用することができる。
【0012】
請求項6記載の運転支援システムによれば、請求項1乃至5の何れかに記載の危険反応地点記録システムを備え、危険反応判定手段は、生体反応データが平均的な状態から所定値を超えて変化した場合、及び/又は、車両操作データが異常操作と認められるデータを示した場合は、運転者に対して警告を与えるようにする。従って、車両の走行中に、危険反応地点記録手段が危険反応の発生地点を順次記録して行くことに並行して、危険反応判定手段が、危険反応の発生につながりそうな状況を検知した段階で運転者に警告を与えるようにすれば、実際に運転が危険な状況に至ることを回避することができる。
【発明を実施するための最良の形態】
【0013】
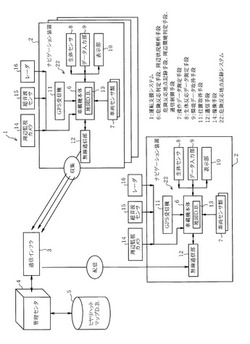
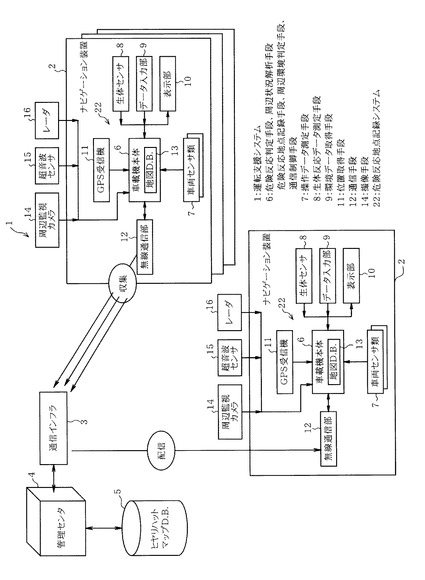
以下、本発明の一実施例について図面を参照して説明する。図1は、運転支援システム全体の構成を示すブロック図である。運転支援システム1は、車両に搭載されるナビゲーション装置2と、ナビゲーション装置2より通信インフラ3を介して情報を収集すると共に、収集した情報をナビゲーション装置2に配信する管理センタ4と、管理センタ4において管理されるヒヤリハットマップデータベース(DB)5とで構成されている。
ナビゲーション装置2は、車載機本体(危険反応判定手段,周辺状況解析手段,危険反応地点記録手段,周辺環境判定手段,通信制御手段)6に対して、車両センサ類(操作データ測定手段)7、生体センサ(生体反応データ測定手段)8、データ入力部(環境データ取得手段)9、表示部10、GPS受信機(位置取得手段)11、無線通信部(通信手段)12などが接続されて構成されている。
【0014】
車載機本体6は、CPUを含む制御部、データ格納部、地図データベース13などで構成され、一般的なナビゲーション装置としての機能もなす部分である。車両センサ類7は車両の各部に配置され、車速や車両の操作状態を検出するためのセンサであり、生体センサ8は、運転者の身体的変化(生体反応)を検出するセンサである(これらの詳細については後述する)。データ入力部9は、車両の周辺環境(天候等)に関する各種データを入力するためのインターフェイスであり、表示部10は、ナビゲーション装置2における地図データの表示や経路案内表示を行うためのディスプレイである。
【0015】
GPS受信機11は、GPS衛星より送信されるGPS信号を受信して、車両の位置(緯度,経度)を検出するものであり、無線通信部12は、管理センタ4と通信インフラ3(例えば、VICS(Vehicle Information and Communication System,登録商標)用に路上に設置されている通信装置であったり、携帯電話機の基地局を含む通信網など)を介して通信を行うための構成である。
【0016】
また、ナビゲーション装置2が搭載されている車両には、周辺監視カメラ(撮像手段)14,超音波センサ15,レーダ(マイクロ波)16が配置されている。周辺監視カメラ14は、車両周辺の画像を撮像するものであり、超音波センサ15は、対象物の有無及び車両と対象物との距離を測定するセンサ(複数あれば位置も検出可能)であり、レーダ16は、同様に対象物の有無及び対象物との距離、並びに対象物の移動速度を測定するセンサである。そして、これらより出力される信号は、車載機本体6に与えられている。また、これらに加えて赤外線センサを付加すれば、対象物が人間であるか否かを判別することもできる。
ナビゲーション装置2は、収集したデータ等を管理センタ4側に送信する車両側端末として、また、運転者の要求に応じて管理センタ4側より配信されるデータを受信する車両側端末として機能する。
【0017】
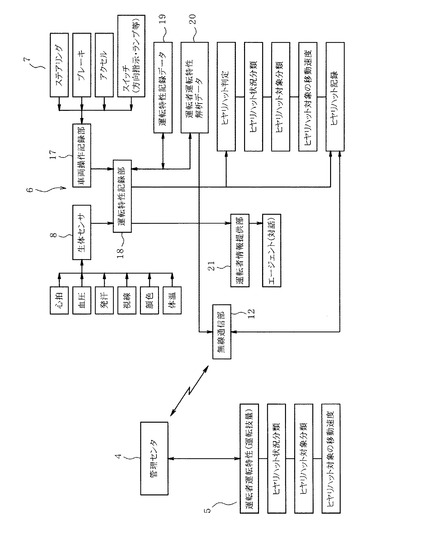
図2は、ナビゲーション装置2の車載機本体6において、車両の運転中に運転者が所謂「ヒヤリハット」を感じた地点を記録するためのシステム構成を示す機能ブロック図である。生体センサ8は、運転者の身体各部に接触配置されており、運転者の精神状態が反映される例えば、心拍数、血圧、発汗状態、体温などの生体反応を測定して記録する。また、生体センサ8には運転者監視カメラも含まれており、その運転者監視カメラは、運転中における運転者の視線や顔色などの撮像するために配置されている。
【0018】
車両センサ類7としては、ステアリングセンサやブレーキ,アクセルの操作状態、方向指示器レバーやランプ、ワイパーなどの操作スイッチなどがあり、それらの検出結果は、車両操作記録部(操作データ測定手段)17において記録されるようになっている。そして、生体センサ8で記録された情報と、車両操作記録部17で記録された情報とは運転特性記録部(危険反応判定手段,周辺環境判定手段)18において統合され、運転特性記録データ19として記録される。尚、運転特性記録データ19には、GPS受信機11より出力される車両の位置情報と、その車両位置に対応する地図データベース13の地図データも付加されるようになっている。更に、運転特性記録データ19には、データ入力部9を介して得られる外部気温や天候(降雨、降雪の有無など)の情報も同時に記録されるようになっている。
【0019】
そして、運転特性記録データ19は、運転特性記録部18により解析され、その解析結果が運転者運転特性解析データ20として記録される。ここで、運転特性解析データ20には、リアルタイムで解析された結果である現在解析データと、運転者の平均的な運転状態に基づいて得られる平均解析データとがある。平均解析データは、運転者が何処の車両位置でどのような運転操作をするか、また、その時の生体センサ情報がどのような値を示しているか、という運転者の平均的な運転傾向データとして記録されるものである。また、各データは、データが得られた時刻と共に記録されるようになっている。
そして、運転者が何らかの危険を察知した場合は、それに伴う身体的な反応が生体反応データに反映されると共に、車両操作データにも通常の運転では行われないような急激な変化が現れることが推量されるため、運転特性記録部18は、上記解析データについて突発的な変化が生じた場合(例えば、平均的な値から短時間内に大きな変化が生じた場合など)に危険反応、即ち「ヒヤリハット」反応の発生を判定する。
【0020】
例えば、運転者が初心者であれば、前方車両との車間距離を相当確保しないと生体センサ情報が「ヒヤリハット」反応を示すが、熟練者の場合は車間距離が短くても「ヒヤリハット」反応が生じない、というような分析によって、運転の習熟度を判定することもできる。また、対象物との距離間隔をどのようにとっているかによって、運転者の運転技量も判定することができる。例えば、固定物に接触はしていないが車両との間隔が不十分であるため「ヒヤリハット」反応が生じている場合は、運転技量が低いと判定することができる。
【0021】
運転者情報提供部21は、表示部10にメッセージを表示させたり、或いは図示しないスピーカを介して音声によりメッセージを出力することで、運転者に対する報知を行う機能部である。また、運転者が発した音声が図示しないマイクを介して入力されると、その音声を認識する処理を行ない、ナビゲーション装置2への操作入力を行なうことも可能である。
更に、運転者情報提供部21は、運転者の状態を生体センサ情報に基づいて把握すると、その状態に応じたアドバイスやガイダンスを行なう、といったエージェント機能も行なうようになっている。例えば、心拍数や発汗状態から、運転者がアドバイスを聞く余裕がある平静な状態にあると判断した場合になるとアドバイスをしたり、それらの情報から運転者の緊張が高まる傾向を示している場合は、事前に冷静になるように呼びかけるアドバイスを行なう。
尚、以上の構成において、ナビゲーション装置2を中心とする構成が、危険反応地点記録システム22を構成している。
【0022】
次に、本実施例の作用について図3乃至図8も参照して説明する。図3は、運転特性記録部18によって行われる制御内容を示すフローチャートである。運転特性記録部18は、先ず、生体センサ8より生体センサ情報を収集し(ステップS1)、その情報に、車両の運転に影響を与える異常な数値を示しているものがないかをチェックする(ステップS2)。生体センサ情報に異常が認められると(「YES」)、運転特性記録部18は、車両操作記録部17における前記異常が認められた時刻以前の車両操作記録情報を参照する(ステップS12)。
【0023】
そして、車両操作記録情報にも異常が認められれば(ステップS13,「YES」)ヒヤリハット反応が生じたものと判定し、ヒヤリハット対象物を判定すると共に(ステップS15)運転技量判定を行い(ステップS16)、それらの判定結果と共にヒヤリハット情報を記録する(ステップS17)。ここで、ヒヤリハット情報を記録する場合は、車両操作データが示す異常操作データの種類に応じて、ヒヤリハット反応の種類を分類した上で記録する。即ち、異常操作データの種類が、例えば、ブレーキ操作に関するものであったり、ハンドル操作に関するものであったりすれば、それに応じてヒヤリハット反応の種類を「急ブレーキ操作」や「急ハンドル操作」などに分類する。
また、ヒヤリハット反応が生じた時点に車両が位置している箇所の地図データを、地図データベース13より取得して記録する。即ち、上記反応が生じた地点が、具体的にどのような地形や道路形状であったのか、例えば、直進路、分岐路、三叉路、交差点、一般道路、高速道路、登坂路などを記録する。
【0024】
更に、上記反応が生じた時点にデータ入力部9を介して取得された環境状態データに基づいて車両周辺の環境状態を判定して記録する。ここで、「車両周辺の環境状態」とは、例えば、雨や霧,雪などの天候に関するものであったり、それに付随する路面の滑り易さ,凍結状態の状態、昼夜の別などを言う。即ち、データ入力部9としては、車両外部の通信インフラを介して天候や道路状況データを取得する通信機、或いは、降雨センサや降雪センサなど、若しくは、運転者自身が上記の情報を直接入力するものであっても良い。そして、運転特性記録部18は、データ入力部9を介して取得したデータに基づいて環境状態を判定する。
【0025】
一方、ステップS13で車両操作記録情報に異常がなければ(「NO」)、そのデータは単独で生体異常情報として記録される(ステップS14)。尚、生体センサ8がセンサ情報を記録している場合、ステップS14の処理は不要である。
また、ステップS2において、生体センサ情報に異常が認められない場合は(「NO」)車両操作記録部17におけるその時点の車両操作記録情報を参照する(ステップS3)。そして、生体センサ情報と車両操作記録情報とを連結(統合)し、車両位置、時刻、走行環境を示すデータと共に運転特性記録データ19として記録する(ステップS4)。
【0026】
それから、運転特性記録部18は、運転特性記録データ19をサンプリングした数をカウントし(ステップS6)、予め指定したサンプル数が得られていなければ(ステップS7,「NO」)ステップS1に戻り、前記数が得られていれば(「YES」)、そのサンプル数のデータ19について統計的な解析処理を行なう(ステップS8)。例えば、1回/100m秒、即ち10回/1秒の間隔でデータをサンプリングしている場合、10個のサンプルデータが得られる毎に平均値や標準偏差を演算する。その演算結果が運転者運転特性解析データ20となる。
【0027】
ステップS8で演算を行なった結果、解析データ20に異常が認められなければ(ステップS9,「NO」)当該データ20を記録する(ステップS10)。そして、この場合、運転者は平静な状態にあると推定されるので、車載機本体6に記録されているヒヤリハット情報を参照し、以前に車両の現地点においてヒヤリハット反応が検出された場合の事象が存在すれば、その事象を運転者に報知する(ステップS18)。この場合の報知は、運転者が平静な状態にある時に行なわれるので、ヒヤリハット反応が発生した直後に報知を行う場合によりも運転者が報知内容を理解し易いという効果がある。
一方、解析データ20に異常が認められた場合、例えば一部のデータ値が標準偏差を外れるような値を示した場合は(ステップS9,「YES」)、その異常が認められた解析データ20を異なる領域に記録する。また、他の車載システム(例えば、車両のボディECU(Electronic Control Unit)など)にその情報を送信して通知する(ステップS11)。
【0028】
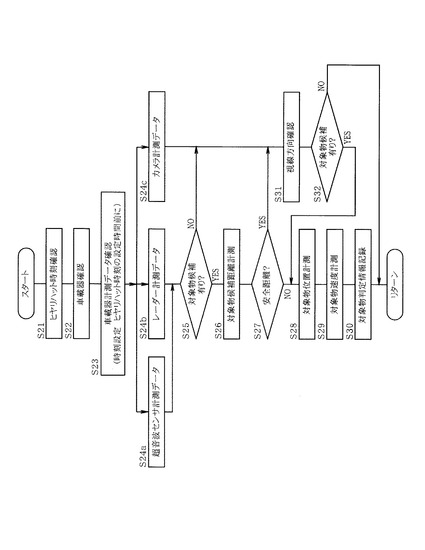
図4は、図3のステップS15におけるヒヤリハット対象物判定の処理内容を示すフローチャートである。先ず、ステップS13で「YES」と判定した時刻、即ち、車両の運転中に運転者がヒヤリハット感じたと推定される時刻を確認(参照して記録)する(ステップS21)。それから、対象物検出用のセンサとして、車両に何が搭載されているかを確認し(ステップS22)、確認されたセンサによる計測データの記録を参照する(ステップS23)。
【0029】
本実施例の場合、生体センサ8の運転者監視カメラ及び周辺監視カメラ14、超音波センサ15、レーダ16が搭載されているので、これらのデータをヒヤリハット反応の発生時刻から遡及して参照する。超音波センサ15、レーダ16の計測データからは(ステップS24a,S24b)ヒヤリハット反応の対象物候補が車両の付近に存在するか否かを判定し(ステップS25)、存在する場合は(「YES」)、その対象物との距離を計測する(ステップS26)。尚、距離の計測はレーダ16による。
そして、計測した距離が所定の安全距離以上であるか否かを判断し(ステップS27)、安全距離が確保されていなければ(「NO」)その対象物をヒヤリハット反応の対象物と判定し、当該対象物が存在していた位置と、当該対象物の移動速度(固定物であれば速度は「0」)を計測する(ステップS28,S29)。それから、対象物の位置及び速度を対象物判定情報として記録し(ステップS30)処理を終了(リターン)する。
【0030】
また、運転者監視カメラの画像データからは(ステップS24c)運転者の視線方向がどちらを向いているかを判定して(ステップS31)、その視線方向の先にヒヤリハット反応の対象物候補が存在するか否かを判定する(ステップS32)。尚、超音波センサ15、レーダ16によって検知できる対象物は範囲が限定されているので、それらの計測データに基づきステップS25で対象物候補なし(「NO」)と判定した場合もステップS31に移行して再度判定を行う。そして、ステップS32で「YES」と判断すればステップS28に移行し、「NO」と判断すればそのままリターンする。
【0031】
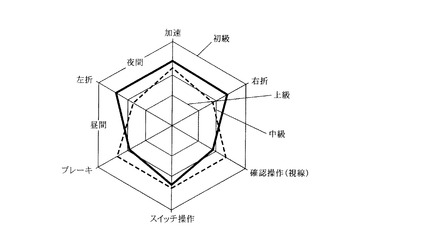
図5は、図3のステップS16における運転技量判定の処理内容を示すフローチャートである。先ず、運転者特性記録を参照して(ステップS41)、ヒヤリハット情報を確認すると共に(ステップS42)、その情報を各評価項目について分類する(ステップS43)。例えば、図6に示すように、ブレーキ操作速度、加速操作速度、右折・左折操作速度、確認操作速度、その他の機器のスイッチ操作速度などである。ブレーキ操作,加速操作の速度、右折・左折、スイッチの操作速度については、夫々車両センサ類8を介してブレーキ,アクセル,ステアリング,その他スイッチの操作速度から得られたものである。
【0032】
また、確認操作速度については、運転者監視カメラによって撮像された運転者の視線の動きより得られたものである。それから、これらの評価項目についてそれぞれ評価を行なう。各評価項目については、初級、中級、上級の3レベルで評価するための平均速度との比較が行なわれ(ステップS44)、運転技量の評価を決定する(ステップS45)。また、車両が走行している時間帯の相違(昼間,夜間等)も技量判定(評価項目の分類)に用いられる。そして、運転技量の判定結果を管理センタ4に送信する(ステップS46)。すると、管理センタ4は、受信した情報をヒヤリハットデータベース5に登録する。
【0033】
ここで、図6は、運転技量判定結果の一例を示すチャートである。各操作時間等は原点に近付くほど短くなっており、技量レベルの評価が高くなる。例えば、実線で示す判定結果の場合、管理センタ4は、後述するように車両側からの情報送信要求があった場合、夜間の右折、左折、加速については初級レベルのヒヤリハットデータを送信し、ブレーキ操作については中級レベルのデータを送信する。
【0034】
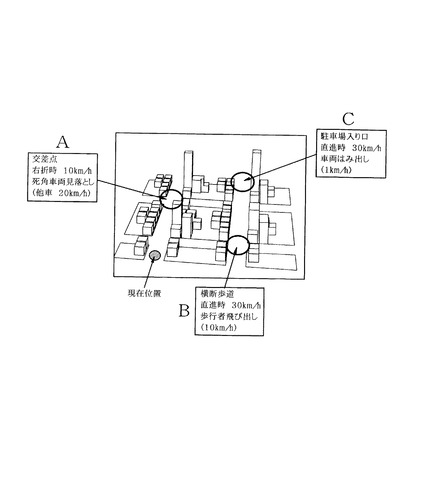
また、図7は、記録されたヒヤリハット情報の一例を、3次元地図データに合せて示したもの(ヒヤリハットマップ)である。例えば、現在位置から前方の交差点Aについては、過去に時速10km/hで右折した際に、死角に入っていた他車両(時速20km/h)の見落としがあったことを示す。また、現在位置から右方の横断歩道Bについては、時速30km/hで直進した際に、歩行者(時速10km/h)の飛び出しがあったことを示す。また、現在位置から右斜め前方の駐車場入口Cについては、時速30km/hで直進した際に、他車両の所定の駐車位置からのはみ出し(時速1km/h)があったことを示す。
【0035】
図8は、管理センタ4側に収集記録されたヒヤリハットマップデータベース5の情報を利用して、運転者が車両を運転する場合の処理を示すフローチャートである。先ず、運転者は、ナビゲーション装置2を介して管理センタ4に情報送信要求を行う(ステップS51)。すると、管理センタ4は、各運転者の技量に応じたレベルのヒヤリハットデータを、ヒヤリハットマップデータベース5より検索してそのデータを車両側に送信し、ナビゲーション装置2は、そのデータを受信して記録する(ステップS52)。
【0036】
それから、車両が走行している途中に図7に示すようなヒヤリハットポイントに近づいた場合、ナビゲーション装置2の車載機本体6は、GPS受信機11が計測した車両の現在位置を取得すると(ステップS53)、その位置がヒヤリハットポイントの近傍(例えば、ヒヤリハットポイントの100m程度手前の位置など)であるか否かを判定する(ステップS54)。そして、ヒヤリハットポイントの近傍であれば(「YES」)ヒヤリハット情報を参照して(ステップS55)、当該ポイントに対応する情報を取得する。すると、その情報の内容を、例えば音声メッセージなどで報知して(ステップS56)運転支援ガイダンスを行う。
例えば、車両が図7に示す交差点Aの近傍に位置しているとすれば、「次の交差点で右折した際に、死角に入った他車両の見落としがありました」というような音声メッセージを出力する。尚、自車両及び他車両の速度情報については、表示部10に表示するなどしても良い。
【0037】
以上のように本実施例によれば、ナビゲーション装置2を制御する車載機本体6において、運転特性記録部18は、生体反応データと車両操作データとを周期的に監視し、生体反応データが平均的な状態から所定値を超えて変化した場合に応じて車両操作データが異常操作と認められるデータを示すと、ヒヤリハット反応が生じたと判定する。そして、ヒヤリハット反応が生じた時点の前後において周辺監視カメラ14により撮像された車両の周辺の動画像を解析し、周辺に存在する移動体及び/又は固定物とを分類し、運転特性記録部18は、分類された移動体及び/又は固定物について車両を基準とする移動速度と移動方向とを検出して、車両の位置と共にヒヤリハット情報を記録する。従って、ヒヤリハット反応が生じた場合に、車両の周辺が具体的にどのような状況であったのかを記録することができ、以降にヒヤリハット反応が生じた地点を走行しようとする場合にその記録データを利用することができる。
【0038】
また、運転特性記録部18は、車両操作データが示す異常操作データの種類に応じて、ヒヤリハット反応の種類を分類して記録するので、ヒヤリハット反応が発生した地点において、具体的にどのような車両操作が行なわれたのかを確認することができる。また、ヒヤリハット反応が生じた時点に車両が位置している箇所の地図データを地図データベース13より取得して記録するので、ヒヤリハット反応が生じた地点が、具体的にどのような地形や道路形状であったのかを確認することができる。更に、ヒヤリハット反応が生じた時点に取得された環境状態データに基づいて車両周辺の環境状態を判定し、その環境状態も合わせて記録するので、ヒヤリハット反応が生じた時点における車両周辺の状態がどのようであったのかも併せて確認することができる。
【0039】
加えて、車載機本体6は、記録されたヒヤリハット情報を、無線通信部12を介して定期的に管理センタ4に送信するので、管理センタ4側でヒヤリハット反応地点の記録データベース5を作成することが可能となり、管理センタ4に集められた情報を、必要に応じて車両に配信するようにすれば、個別に収集された情報を統合して有効に利用することができる。
また、車載機本体6は、生体反応データが平均的な状態から所定値を超えて変化した場合、及び/又は、車両操作データが異常操作と認められるデータを示した場合は、運転者に対して警告を与えるので、ヒヤリハット反応の発生につながりそうな状況を検知した段階で運転者に警告を与えることで、実際に運転が危険な状況に至ることを事前に回避することができる。
【0040】
本発明は上記し又は図面に記載した実施例にのみ限定されるものではなく、以下のような変形が可能である。
ヒヤリハット情報を管理センタ4に送信するタイミングは、例えば車両の走行が終了するまではナビゲーション装置2側でバッファリングしておき、走行が終了した時点でまとめて送信するようにしても良い。
走行中の車両の周辺環境に応じて、異なるヒヤリハットマップを作成しても良い。例えば、曜日、時間帯、季節、気候により危険箇所が変化する場合は、その変化に応じて異なるマップを作成・提供しても良い。或いは、車種に応じて危険箇所が変化する場合も、同様に対応しても良い。
例えば、ウインドウディスプレイのように、運転者が視線をずらさずに見ることができる表示部において、ヒヤリハットの対象物が出現した位置をハイライト表示するようにしても良い。この場合、運転者が表示を凝視してしまうことを避けるため、運転者が知覚できる程度の弱い明るさで点滅表示を行う、などが好ましい。
位置取得手段は、GPS受信機11に限ることなく、例えばVICSのインフラを利用して車両の位置を取得するような手段であっても良い。
車載機本体6が運転者に警告を与えて運転支援を行う機能は、必要に応じて設ければ良い。
【0041】
生体センサ8は、個別の設計に応じて必要と思われるものを適宜選択して使用すれば良い。
危険反応地点を記録する場合に、危険反応の種類を分類したり地図データや車両周辺の環境状態を共に記録することは、必要に応じて行えば良い。
車両側で収集した危険反応地点に関する情報を、管理センタ側に送信する構成は必要に応じて設ければ良く、各車両において夫々収集された情報のみを利用するようにしても良い。
危険反応地点記録システム、また運転支援システムは、必ずしも車両用ナビゲーション装置2を用いて実現するものに限らず、システム専用の装置を用いて実現しても良い。
【図面の簡単な説明】
【0042】
【図1】本発明の一実施例であり、運転支援システム全体の構成を示すブロック図
【図2】ナビゲーション装置の車載機本体において、車両の運転中に運転者がヒヤリハット感じた地点を記録するためのシステム構成を示す機能ブロック図
【図3】運転特性記録部によって行われる制御内容を示すフローチャート
【図4】図3のステップS15におけるヒヤリハット対象物判定の処理内容を示すフローチャート
【図5】図3のステップS16における運転技量判定の処理内容を示すフローチャート
【図6】運転技量判定結果の一例を示すチャート
【図7】記録されたヒヤリハット情報の一例を、3次元地図データに合せて示した図
【図8】管理センタ側に収集記録された情報を利用して、運転者が車両を運転する場合の処理を示すフローチャート
【符号の説明】
【0043】
図面中、1は運転支援システム、2はナビゲーション装置、4は管理センタ、5はヒヤリハットマップデータベース、6は車載機本体(危険反応判定手段,周辺状況解析手段,危険反応地点記録手段,周辺環境判定手段,通信制御手段)、7は車両センサ類(操作データ測定手段)、8は生体センサ(生体反応データ測定手段)、9はデータ入力部(環境データ取得手段)、10は表示部、11はGPS受信機(位置取得手段)、12は無線通信部(通信手段)、13は地図データベース、14は周辺監視カメラ(撮像手段)、17は車両操作記録部(操作データ測定手段)、18は運転特性記録部(危険反応判定手段,周辺環境判定手段)、22は危険反応地点記録システムを示す。
【技術分野】
【0001】
本発明は、運転者が車両の運転中に危険を感じたと推定される地点を記録するための危険反応地点記録システム、及びそのシステムを利用して構成される運転支援システムに関する。
【背景技術】
【0002】
一般に、車両の運転者は、自らの運転経験や事故警告などの外部の情報に基づいて、道路上の危険箇所の認識を行っているが、このような認識は、運転者の利用頻度が高い道路についてのみ行われる。最近では、車両用ナビゲーション装置が普及したことで走行ルートの選択肢が増加しており、その結果、比較的利用頻度が低い道路を走行する機会も増えている状況にある。従って、道路上の危険箇所の情報をナビゲーション用の地図上に反映させるようにすれば、利用頻度が低い道路をより安全に走行するのに役立つことが想定される。
【0003】
このため、道路上の危険箇所を定量的に把握するように、実証実験レベルでは、車両の走行状態に基づいた危険状態を示す指標の計測が行なわれている。例えば、車両のABS(Anti-lock Braking System)の動作状態や、車両の加減速状態を監視することで、急制動が生じたか否かを判別可能することができる。また、危険箇所を特定するには、生体センサなどを利用して運転者の身体的な状態変化を測定することでも、危険箇所において独特な挙動が生じたことを特定できる。例えば、車両の走行状態については通常走行時における変動の範囲内にあるとしても、運転者の心拍数が急激に上昇したような場合には、所謂「ヒヤリハット」と謂われる危険な状態が発生しているものと推測することができる。
【0004】
例えば、特許文献1には、車両に配置したハンドル角センサ、車軸速度センサ、車間距離センサや、運転者に取付けた脈拍センサ、音声集音マイクなどの出力に基づいて、「急ハンドル」、「急ブレーキ」、「急加速」、「スリップ」、「追突可能性」、「速度超過」、「緊張走行」、「運転者緊張状態」、「興奮状態」、「死亡事故跡」、「事故跡」、「歩行者、自転車注意」「オートバイ注意」、「対向車注意」、「後続車注意」、「視界不良」、「急カーブ」、「その他」等の危険の種類を判定すると共に危険箇所を特定し、地図データに反映させ、その情報を運転者に提供することで安全運転支援に資するようにした技術が開示されている。
【特許文献1】特開2003−123185号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、道路上の特定箇所における危険状況というものは、運転者の修練度合いや車両が実際に走行した場合における周囲環境の状態などによって相対的に異なる。従って、上記のように、例えば「歩行者、自転車注意」「オートバイ注意」、「対向車注意」、「後続車注意」のような通知がなされたとしても、その箇所を実際に走行した場合に、どのように危険な状況が想定されるのかが具体的に把握できず、事前に危険性を予想してその回避を図ることが行い難いという問題があった。
本発明は上記事情に鑑みてなされたものであり、その目的は、実際に車両が道路を走行する箇所の周辺状況に応じて、危険状況の認識をより具体的に行うことができる危険反応地点記録システム、及びそのシステムを利用して構成される運転支援システムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1記載の危険反応地点記録システムによれば、危険反応判定手段は、生体反応データと車両操作データとを周期的に監視し、生体反応データが平均的な状態から所定値を超えて変化した場合に応じて車両操作データが異常操作と認められるデータを示すと、危険反応が生じたと判定する。即ち、運転者が何らかの危険を察知した場合は、そのときの精神状態が生体反応データに反映されると共に、車両操作データにも通常の運転では行われないような急激な変化が現れることが推量されるため、これらに基づき所謂「ヒヤリハット」と称されるような危険反応の発生を判定する。
【0007】
そして、周辺状況解析手段は、危険反応が生じた時点の前後において撮像手段により撮像された車両の周辺の動画像を解析し、周辺に存在する移動体及び/又は固定物とを分類し、危険反応地点記録手段は、分類された移動体及び/又は固定物について車両を基準とする移動速度と移動方向とを検出して、車両の位置と共に記録する。従って、危険反応が生じた場合に、車両の周辺が具体的にどのような状況であったのかを記録することができ、以降に危険反応が生じた地点を走行しようとする場合にその記録データを利用することができる。
【0008】
請求項2記載の危険反応地点記録システムによれば、危険反応判定手段は、車両操作データが示す異常操作データの種類に応じて、危険反応の種類を分類する。即ち、運転者に危険反応が生じた場合における異常操作データの種類が、例えば、ブレーキ操作に関するものであったり、ハンドル操作に関するものであったりすれば、それに応じて反応の種類を「急ブレーキ操作」や「急ハンドル操作」などに分類することができる。従って、危険反応が発生した地点において、具体的にどのような車両操作が行なわれたのかを確認することができる。
【0009】
請求項3記載の危険反応地点記録システムによれば、危険反応地点記録手段は、危険反応が生じた時点に車両が位置している箇所の地図データを地図データベースより取得して記録する。従って、危険反応が生じた地点が、具体的にどのような地形や道路形状であったのか(例えば、直進路、分岐路、三叉路、交差点、一般道路、高速道路、登坂路など)を確認することができる。
【0010】
請求項4記載の危険反応地点記録システムによれば、周辺環境判定手段は、危険反応が生じた時点に取得された環境状態データに基づいて車両周辺の環境状態を判定し、危険反応地点記録手段は、判定された車両周辺の環境状態も記録する。ここで、「車両周辺の環境状態」とは、例えば、雨や霧などの天候に関するものであったり、それに付随する路面の滑り易さの状態などを言う。従って、このような環境状態も記録することで、危険反応が生じた時点における車両周辺の状態がどのようであったのかも併せて確認することができる。
【0011】
請求項5記載の危険反応地点記録システムによれば、通信制御手段は、危険反応地点記録手段によって記録された情報を、通信手段を介して定期的に管理センタに送信する。即ち、各車両毎に収集記録された危険反応地点の情報を管理センタに集めることで、管理センタ側で危険反応地点の記録データベースを作成することが可能となる。そして、管理センタに集められた情報を、必要に応じて車両に配信するようにすれば、個別に収集された情報を統合して有効に利用することができる。
【0012】
請求項6記載の運転支援システムによれば、請求項1乃至5の何れかに記載の危険反応地点記録システムを備え、危険反応判定手段は、生体反応データが平均的な状態から所定値を超えて変化した場合、及び/又は、車両操作データが異常操作と認められるデータを示した場合は、運転者に対して警告を与えるようにする。従って、車両の走行中に、危険反応地点記録手段が危険反応の発生地点を順次記録して行くことに並行して、危険反応判定手段が、危険反応の発生につながりそうな状況を検知した段階で運転者に警告を与えるようにすれば、実際に運転が危険な状況に至ることを回避することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の一実施例について図面を参照して説明する。図1は、運転支援システム全体の構成を示すブロック図である。運転支援システム1は、車両に搭載されるナビゲーション装置2と、ナビゲーション装置2より通信インフラ3を介して情報を収集すると共に、収集した情報をナビゲーション装置2に配信する管理センタ4と、管理センタ4において管理されるヒヤリハットマップデータベース(DB)5とで構成されている。
ナビゲーション装置2は、車載機本体(危険反応判定手段,周辺状況解析手段,危険反応地点記録手段,周辺環境判定手段,通信制御手段)6に対して、車両センサ類(操作データ測定手段)7、生体センサ(生体反応データ測定手段)8、データ入力部(環境データ取得手段)9、表示部10、GPS受信機(位置取得手段)11、無線通信部(通信手段)12などが接続されて構成されている。
【0014】
車載機本体6は、CPUを含む制御部、データ格納部、地図データベース13などで構成され、一般的なナビゲーション装置としての機能もなす部分である。車両センサ類7は車両の各部に配置され、車速や車両の操作状態を検出するためのセンサであり、生体センサ8は、運転者の身体的変化(生体反応)を検出するセンサである(これらの詳細については後述する)。データ入力部9は、車両の周辺環境(天候等)に関する各種データを入力するためのインターフェイスであり、表示部10は、ナビゲーション装置2における地図データの表示や経路案内表示を行うためのディスプレイである。
【0015】
GPS受信機11は、GPS衛星より送信されるGPS信号を受信して、車両の位置(緯度,経度)を検出するものであり、無線通信部12は、管理センタ4と通信インフラ3(例えば、VICS(Vehicle Information and Communication System,登録商標)用に路上に設置されている通信装置であったり、携帯電話機の基地局を含む通信網など)を介して通信を行うための構成である。
【0016】
また、ナビゲーション装置2が搭載されている車両には、周辺監視カメラ(撮像手段)14,超音波センサ15,レーダ(マイクロ波)16が配置されている。周辺監視カメラ14は、車両周辺の画像を撮像するものであり、超音波センサ15は、対象物の有無及び車両と対象物との距離を測定するセンサ(複数あれば位置も検出可能)であり、レーダ16は、同様に対象物の有無及び対象物との距離、並びに対象物の移動速度を測定するセンサである。そして、これらより出力される信号は、車載機本体6に与えられている。また、これらに加えて赤外線センサを付加すれば、対象物が人間であるか否かを判別することもできる。
ナビゲーション装置2は、収集したデータ等を管理センタ4側に送信する車両側端末として、また、運転者の要求に応じて管理センタ4側より配信されるデータを受信する車両側端末として機能する。
【0017】
図2は、ナビゲーション装置2の車載機本体6において、車両の運転中に運転者が所謂「ヒヤリハット」を感じた地点を記録するためのシステム構成を示す機能ブロック図である。生体センサ8は、運転者の身体各部に接触配置されており、運転者の精神状態が反映される例えば、心拍数、血圧、発汗状態、体温などの生体反応を測定して記録する。また、生体センサ8には運転者監視カメラも含まれており、その運転者監視カメラは、運転中における運転者の視線や顔色などの撮像するために配置されている。
【0018】
車両センサ類7としては、ステアリングセンサやブレーキ,アクセルの操作状態、方向指示器レバーやランプ、ワイパーなどの操作スイッチなどがあり、それらの検出結果は、車両操作記録部(操作データ測定手段)17において記録されるようになっている。そして、生体センサ8で記録された情報と、車両操作記録部17で記録された情報とは運転特性記録部(危険反応判定手段,周辺環境判定手段)18において統合され、運転特性記録データ19として記録される。尚、運転特性記録データ19には、GPS受信機11より出力される車両の位置情報と、その車両位置に対応する地図データベース13の地図データも付加されるようになっている。更に、運転特性記録データ19には、データ入力部9を介して得られる外部気温や天候(降雨、降雪の有無など)の情報も同時に記録されるようになっている。
【0019】
そして、運転特性記録データ19は、運転特性記録部18により解析され、その解析結果が運転者運転特性解析データ20として記録される。ここで、運転特性解析データ20には、リアルタイムで解析された結果である現在解析データと、運転者の平均的な運転状態に基づいて得られる平均解析データとがある。平均解析データは、運転者が何処の車両位置でどのような運転操作をするか、また、その時の生体センサ情報がどのような値を示しているか、という運転者の平均的な運転傾向データとして記録されるものである。また、各データは、データが得られた時刻と共に記録されるようになっている。
そして、運転者が何らかの危険を察知した場合は、それに伴う身体的な反応が生体反応データに反映されると共に、車両操作データにも通常の運転では行われないような急激な変化が現れることが推量されるため、運転特性記録部18は、上記解析データについて突発的な変化が生じた場合(例えば、平均的な値から短時間内に大きな変化が生じた場合など)に危険反応、即ち「ヒヤリハット」反応の発生を判定する。
【0020】
例えば、運転者が初心者であれば、前方車両との車間距離を相当確保しないと生体センサ情報が「ヒヤリハット」反応を示すが、熟練者の場合は車間距離が短くても「ヒヤリハット」反応が生じない、というような分析によって、運転の習熟度を判定することもできる。また、対象物との距離間隔をどのようにとっているかによって、運転者の運転技量も判定することができる。例えば、固定物に接触はしていないが車両との間隔が不十分であるため「ヒヤリハット」反応が生じている場合は、運転技量が低いと判定することができる。
【0021】
運転者情報提供部21は、表示部10にメッセージを表示させたり、或いは図示しないスピーカを介して音声によりメッセージを出力することで、運転者に対する報知を行う機能部である。また、運転者が発した音声が図示しないマイクを介して入力されると、その音声を認識する処理を行ない、ナビゲーション装置2への操作入力を行なうことも可能である。
更に、運転者情報提供部21は、運転者の状態を生体センサ情報に基づいて把握すると、その状態に応じたアドバイスやガイダンスを行なう、といったエージェント機能も行なうようになっている。例えば、心拍数や発汗状態から、運転者がアドバイスを聞く余裕がある平静な状態にあると判断した場合になるとアドバイスをしたり、それらの情報から運転者の緊張が高まる傾向を示している場合は、事前に冷静になるように呼びかけるアドバイスを行なう。
尚、以上の構成において、ナビゲーション装置2を中心とする構成が、危険反応地点記録システム22を構成している。
【0022】
次に、本実施例の作用について図3乃至図8も参照して説明する。図3は、運転特性記録部18によって行われる制御内容を示すフローチャートである。運転特性記録部18は、先ず、生体センサ8より生体センサ情報を収集し(ステップS1)、その情報に、車両の運転に影響を与える異常な数値を示しているものがないかをチェックする(ステップS2)。生体センサ情報に異常が認められると(「YES」)、運転特性記録部18は、車両操作記録部17における前記異常が認められた時刻以前の車両操作記録情報を参照する(ステップS12)。
【0023】
そして、車両操作記録情報にも異常が認められれば(ステップS13,「YES」)ヒヤリハット反応が生じたものと判定し、ヒヤリハット対象物を判定すると共に(ステップS15)運転技量判定を行い(ステップS16)、それらの判定結果と共にヒヤリハット情報を記録する(ステップS17)。ここで、ヒヤリハット情報を記録する場合は、車両操作データが示す異常操作データの種類に応じて、ヒヤリハット反応の種類を分類した上で記録する。即ち、異常操作データの種類が、例えば、ブレーキ操作に関するものであったり、ハンドル操作に関するものであったりすれば、それに応じてヒヤリハット反応の種類を「急ブレーキ操作」や「急ハンドル操作」などに分類する。
また、ヒヤリハット反応が生じた時点に車両が位置している箇所の地図データを、地図データベース13より取得して記録する。即ち、上記反応が生じた地点が、具体的にどのような地形や道路形状であったのか、例えば、直進路、分岐路、三叉路、交差点、一般道路、高速道路、登坂路などを記録する。
【0024】
更に、上記反応が生じた時点にデータ入力部9を介して取得された環境状態データに基づいて車両周辺の環境状態を判定して記録する。ここで、「車両周辺の環境状態」とは、例えば、雨や霧,雪などの天候に関するものであったり、それに付随する路面の滑り易さ,凍結状態の状態、昼夜の別などを言う。即ち、データ入力部9としては、車両外部の通信インフラを介して天候や道路状況データを取得する通信機、或いは、降雨センサや降雪センサなど、若しくは、運転者自身が上記の情報を直接入力するものであっても良い。そして、運転特性記録部18は、データ入力部9を介して取得したデータに基づいて環境状態を判定する。
【0025】
一方、ステップS13で車両操作記録情報に異常がなければ(「NO」)、そのデータは単独で生体異常情報として記録される(ステップS14)。尚、生体センサ8がセンサ情報を記録している場合、ステップS14の処理は不要である。
また、ステップS2において、生体センサ情報に異常が認められない場合は(「NO」)車両操作記録部17におけるその時点の車両操作記録情報を参照する(ステップS3)。そして、生体センサ情報と車両操作記録情報とを連結(統合)し、車両位置、時刻、走行環境を示すデータと共に運転特性記録データ19として記録する(ステップS4)。
【0026】
それから、運転特性記録部18は、運転特性記録データ19をサンプリングした数をカウントし(ステップS6)、予め指定したサンプル数が得られていなければ(ステップS7,「NO」)ステップS1に戻り、前記数が得られていれば(「YES」)、そのサンプル数のデータ19について統計的な解析処理を行なう(ステップS8)。例えば、1回/100m秒、即ち10回/1秒の間隔でデータをサンプリングしている場合、10個のサンプルデータが得られる毎に平均値や標準偏差を演算する。その演算結果が運転者運転特性解析データ20となる。
【0027】
ステップS8で演算を行なった結果、解析データ20に異常が認められなければ(ステップS9,「NO」)当該データ20を記録する(ステップS10)。そして、この場合、運転者は平静な状態にあると推定されるので、車載機本体6に記録されているヒヤリハット情報を参照し、以前に車両の現地点においてヒヤリハット反応が検出された場合の事象が存在すれば、その事象を運転者に報知する(ステップS18)。この場合の報知は、運転者が平静な状態にある時に行なわれるので、ヒヤリハット反応が発生した直後に報知を行う場合によりも運転者が報知内容を理解し易いという効果がある。
一方、解析データ20に異常が認められた場合、例えば一部のデータ値が標準偏差を外れるような値を示した場合は(ステップS9,「YES」)、その異常が認められた解析データ20を異なる領域に記録する。また、他の車載システム(例えば、車両のボディECU(Electronic Control Unit)など)にその情報を送信して通知する(ステップS11)。
【0028】
図4は、図3のステップS15におけるヒヤリハット対象物判定の処理内容を示すフローチャートである。先ず、ステップS13で「YES」と判定した時刻、即ち、車両の運転中に運転者がヒヤリハット感じたと推定される時刻を確認(参照して記録)する(ステップS21)。それから、対象物検出用のセンサとして、車両に何が搭載されているかを確認し(ステップS22)、確認されたセンサによる計測データの記録を参照する(ステップS23)。
【0029】
本実施例の場合、生体センサ8の運転者監視カメラ及び周辺監視カメラ14、超音波センサ15、レーダ16が搭載されているので、これらのデータをヒヤリハット反応の発生時刻から遡及して参照する。超音波センサ15、レーダ16の計測データからは(ステップS24a,S24b)ヒヤリハット反応の対象物候補が車両の付近に存在するか否かを判定し(ステップS25)、存在する場合は(「YES」)、その対象物との距離を計測する(ステップS26)。尚、距離の計測はレーダ16による。
そして、計測した距離が所定の安全距離以上であるか否かを判断し(ステップS27)、安全距離が確保されていなければ(「NO」)その対象物をヒヤリハット反応の対象物と判定し、当該対象物が存在していた位置と、当該対象物の移動速度(固定物であれば速度は「0」)を計測する(ステップS28,S29)。それから、対象物の位置及び速度を対象物判定情報として記録し(ステップS30)処理を終了(リターン)する。
【0030】
また、運転者監視カメラの画像データからは(ステップS24c)運転者の視線方向がどちらを向いているかを判定して(ステップS31)、その視線方向の先にヒヤリハット反応の対象物候補が存在するか否かを判定する(ステップS32)。尚、超音波センサ15、レーダ16によって検知できる対象物は範囲が限定されているので、それらの計測データに基づきステップS25で対象物候補なし(「NO」)と判定した場合もステップS31に移行して再度判定を行う。そして、ステップS32で「YES」と判断すればステップS28に移行し、「NO」と判断すればそのままリターンする。
【0031】
図5は、図3のステップS16における運転技量判定の処理内容を示すフローチャートである。先ず、運転者特性記録を参照して(ステップS41)、ヒヤリハット情報を確認すると共に(ステップS42)、その情報を各評価項目について分類する(ステップS43)。例えば、図6に示すように、ブレーキ操作速度、加速操作速度、右折・左折操作速度、確認操作速度、その他の機器のスイッチ操作速度などである。ブレーキ操作,加速操作の速度、右折・左折、スイッチの操作速度については、夫々車両センサ類8を介してブレーキ,アクセル,ステアリング,その他スイッチの操作速度から得られたものである。
【0032】
また、確認操作速度については、運転者監視カメラによって撮像された運転者の視線の動きより得られたものである。それから、これらの評価項目についてそれぞれ評価を行なう。各評価項目については、初級、中級、上級の3レベルで評価するための平均速度との比較が行なわれ(ステップS44)、運転技量の評価を決定する(ステップS45)。また、車両が走行している時間帯の相違(昼間,夜間等)も技量判定(評価項目の分類)に用いられる。そして、運転技量の判定結果を管理センタ4に送信する(ステップS46)。すると、管理センタ4は、受信した情報をヒヤリハットデータベース5に登録する。
【0033】
ここで、図6は、運転技量判定結果の一例を示すチャートである。各操作時間等は原点に近付くほど短くなっており、技量レベルの評価が高くなる。例えば、実線で示す判定結果の場合、管理センタ4は、後述するように車両側からの情報送信要求があった場合、夜間の右折、左折、加速については初級レベルのヒヤリハットデータを送信し、ブレーキ操作については中級レベルのデータを送信する。
【0034】
また、図7は、記録されたヒヤリハット情報の一例を、3次元地図データに合せて示したもの(ヒヤリハットマップ)である。例えば、現在位置から前方の交差点Aについては、過去に時速10km/hで右折した際に、死角に入っていた他車両(時速20km/h)の見落としがあったことを示す。また、現在位置から右方の横断歩道Bについては、時速30km/hで直進した際に、歩行者(時速10km/h)の飛び出しがあったことを示す。また、現在位置から右斜め前方の駐車場入口Cについては、時速30km/hで直進した際に、他車両の所定の駐車位置からのはみ出し(時速1km/h)があったことを示す。
【0035】
図8は、管理センタ4側に収集記録されたヒヤリハットマップデータベース5の情報を利用して、運転者が車両を運転する場合の処理を示すフローチャートである。先ず、運転者は、ナビゲーション装置2を介して管理センタ4に情報送信要求を行う(ステップS51)。すると、管理センタ4は、各運転者の技量に応じたレベルのヒヤリハットデータを、ヒヤリハットマップデータベース5より検索してそのデータを車両側に送信し、ナビゲーション装置2は、そのデータを受信して記録する(ステップS52)。
【0036】
それから、車両が走行している途中に図7に示すようなヒヤリハットポイントに近づいた場合、ナビゲーション装置2の車載機本体6は、GPS受信機11が計測した車両の現在位置を取得すると(ステップS53)、その位置がヒヤリハットポイントの近傍(例えば、ヒヤリハットポイントの100m程度手前の位置など)であるか否かを判定する(ステップS54)。そして、ヒヤリハットポイントの近傍であれば(「YES」)ヒヤリハット情報を参照して(ステップS55)、当該ポイントに対応する情報を取得する。すると、その情報の内容を、例えば音声メッセージなどで報知して(ステップS56)運転支援ガイダンスを行う。
例えば、車両が図7に示す交差点Aの近傍に位置しているとすれば、「次の交差点で右折した際に、死角に入った他車両の見落としがありました」というような音声メッセージを出力する。尚、自車両及び他車両の速度情報については、表示部10に表示するなどしても良い。
【0037】
以上のように本実施例によれば、ナビゲーション装置2を制御する車載機本体6において、運転特性記録部18は、生体反応データと車両操作データとを周期的に監視し、生体反応データが平均的な状態から所定値を超えて変化した場合に応じて車両操作データが異常操作と認められるデータを示すと、ヒヤリハット反応が生じたと判定する。そして、ヒヤリハット反応が生じた時点の前後において周辺監視カメラ14により撮像された車両の周辺の動画像を解析し、周辺に存在する移動体及び/又は固定物とを分類し、運転特性記録部18は、分類された移動体及び/又は固定物について車両を基準とする移動速度と移動方向とを検出して、車両の位置と共にヒヤリハット情報を記録する。従って、ヒヤリハット反応が生じた場合に、車両の周辺が具体的にどのような状況であったのかを記録することができ、以降にヒヤリハット反応が生じた地点を走行しようとする場合にその記録データを利用することができる。
【0038】
また、運転特性記録部18は、車両操作データが示す異常操作データの種類に応じて、ヒヤリハット反応の種類を分類して記録するので、ヒヤリハット反応が発生した地点において、具体的にどのような車両操作が行なわれたのかを確認することができる。また、ヒヤリハット反応が生じた時点に車両が位置している箇所の地図データを地図データベース13より取得して記録するので、ヒヤリハット反応が生じた地点が、具体的にどのような地形や道路形状であったのかを確認することができる。更に、ヒヤリハット反応が生じた時点に取得された環境状態データに基づいて車両周辺の環境状態を判定し、その環境状態も合わせて記録するので、ヒヤリハット反応が生じた時点における車両周辺の状態がどのようであったのかも併せて確認することができる。
【0039】
加えて、車載機本体6は、記録されたヒヤリハット情報を、無線通信部12を介して定期的に管理センタ4に送信するので、管理センタ4側でヒヤリハット反応地点の記録データベース5を作成することが可能となり、管理センタ4に集められた情報を、必要に応じて車両に配信するようにすれば、個別に収集された情報を統合して有効に利用することができる。
また、車載機本体6は、生体反応データが平均的な状態から所定値を超えて変化した場合、及び/又は、車両操作データが異常操作と認められるデータを示した場合は、運転者に対して警告を与えるので、ヒヤリハット反応の発生につながりそうな状況を検知した段階で運転者に警告を与えることで、実際に運転が危険な状況に至ることを事前に回避することができる。
【0040】
本発明は上記し又は図面に記載した実施例にのみ限定されるものではなく、以下のような変形が可能である。
ヒヤリハット情報を管理センタ4に送信するタイミングは、例えば車両の走行が終了するまではナビゲーション装置2側でバッファリングしておき、走行が終了した時点でまとめて送信するようにしても良い。
走行中の車両の周辺環境に応じて、異なるヒヤリハットマップを作成しても良い。例えば、曜日、時間帯、季節、気候により危険箇所が変化する場合は、その変化に応じて異なるマップを作成・提供しても良い。或いは、車種に応じて危険箇所が変化する場合も、同様に対応しても良い。
例えば、ウインドウディスプレイのように、運転者が視線をずらさずに見ることができる表示部において、ヒヤリハットの対象物が出現した位置をハイライト表示するようにしても良い。この場合、運転者が表示を凝視してしまうことを避けるため、運転者が知覚できる程度の弱い明るさで点滅表示を行う、などが好ましい。
位置取得手段は、GPS受信機11に限ることなく、例えばVICSのインフラを利用して車両の位置を取得するような手段であっても良い。
車載機本体6が運転者に警告を与えて運転支援を行う機能は、必要に応じて設ければ良い。
【0041】
生体センサ8は、個別の設計に応じて必要と思われるものを適宜選択して使用すれば良い。
危険反応地点を記録する場合に、危険反応の種類を分類したり地図データや車両周辺の環境状態を共に記録することは、必要に応じて行えば良い。
車両側で収集した危険反応地点に関する情報を、管理センタ側に送信する構成は必要に応じて設ければ良く、各車両において夫々収集された情報のみを利用するようにしても良い。
危険反応地点記録システム、また運転支援システムは、必ずしも車両用ナビゲーション装置2を用いて実現するものに限らず、システム専用の装置を用いて実現しても良い。
【図面の簡単な説明】
【0042】
【図1】本発明の一実施例であり、運転支援システム全体の構成を示すブロック図
【図2】ナビゲーション装置の車載機本体において、車両の運転中に運転者がヒヤリハット感じた地点を記録するためのシステム構成を示す機能ブロック図
【図3】運転特性記録部によって行われる制御内容を示すフローチャート
【図4】図3のステップS15におけるヒヤリハット対象物判定の処理内容を示すフローチャート
【図5】図3のステップS16における運転技量判定の処理内容を示すフローチャート
【図6】運転技量判定結果の一例を示すチャート
【図7】記録されたヒヤリハット情報の一例を、3次元地図データに合せて示した図
【図8】管理センタ側に収集記録された情報を利用して、運転者が車両を運転する場合の処理を示すフローチャート
【符号の説明】
【0043】
図面中、1は運転支援システム、2はナビゲーション装置、4は管理センタ、5はヒヤリハットマップデータベース、6は車載機本体(危険反応判定手段,周辺状況解析手段,危険反応地点記録手段,周辺環境判定手段,通信制御手段)、7は車両センサ類(操作データ測定手段)、8は生体センサ(生体反応データ測定手段)、9はデータ入力部(環境データ取得手段)、10は表示部、11はGPS受信機(位置取得手段)、12は無線通信部(通信手段)、13は地図データベース、14は周辺監視カメラ(撮像手段)、17は車両操作記録部(操作データ測定手段)、18は運転特性記録部(危険反応判定手段,周辺環境判定手段)、22は危険反応地点記録システムを示す。
【特許請求の範囲】
【請求項1】
運転者の精神状態が反映される生体反応の状態を、生体反応データとして測定して記録する生体反応データ測定手段と
運転者の車両操作データを測定して記録する操作データ測定手段と、
車両の位置を取得して記録する位置取得手段と、
前記車両の周辺の動画像を撮像して記録する撮像手段と、
前記生体反応データと前記車両操作データとを周期的に監視し、前記生体反応データが平均的な状態から所定値を超えて変化した場合に応じて前記車両操作データが異常操作と認められるデータを示すと、危険反応が生じたと判定する危険反応判定手段と、
前記危険反応が生じた時点の前後において、前記撮像手段により撮像された前記車両の周辺の動画像を解析して、周辺に存在する移動体及び/又は固定物とを分類する周辺状況解析手段と、
この周辺状況解析手段によって分類された前記移動体及び/又は固定物について、前記車両を基準とする移動速度と移動方向とを検出し、前記位置取得手段によって取得された前記車両の位置と共に記録する危険反応地点記録手段とを備えることを特徴とする危険反応地点記録システム。
【請求項2】
前記危険反応判定手段は、前記車両操作データが示す異常操作データの種類に応じて、前記危険反応の種類を分類することを特徴とする請求項1記載の危険反応地点記録システム。
【請求項3】
地図データが記録されている地図データベースを備え、
前記危険反応地点記録手段は、前記危険反応が生じた時点に前記車両が位置している箇所の地図データを前記地図データベースより取得して記録することを特徴とする請求項1又は2記載の危険反応地点記録システム。
【請求項4】
前記車両周辺の環境状態を示すデータを取得する環境データ取得手段と、
前記危険反応判定手段によって危険反応が生じた時点に取得された前記環境状態データに基づいて、前記車両周辺の環境状態を判定する周辺環境判定手段とを備え、
前記危険反応地点記録手段は、周辺環境判定手段によって判定された前記車両周辺の環境状態も記録することを特徴とする請求項1乃至3の何れかに記載の危険反応地点記録システム。
【請求項5】
外部の管理センタとの間で通信を行なう通信手段と、
前記危険反応地点記録手段によって記録された情報を、前記通信手段を介して定期的に前記管理センタに送信する通信制御手段とを備えたことを特徴とする請求項1乃至4の何れかに記載の危険反応地点記録システム。
【請求項6】
請求項1乃至5の何れかに記載の危険反応地点記録システムを備え、
前記危険反応判定手段が、前記生体反応データが平均的な状態から所定値を超えて変化した場合、及び/又は、前記車両操作データが異常操作と認められるデータを示した場合に、運転者に対して警告を与えることを特徴とする運転支援システム。
【請求項1】
運転者の精神状態が反映される生体反応の状態を、生体反応データとして測定して記録する生体反応データ測定手段と
運転者の車両操作データを測定して記録する操作データ測定手段と、
車両の位置を取得して記録する位置取得手段と、
前記車両の周辺の動画像を撮像して記録する撮像手段と、
前記生体反応データと前記車両操作データとを周期的に監視し、前記生体反応データが平均的な状態から所定値を超えて変化した場合に応じて前記車両操作データが異常操作と認められるデータを示すと、危険反応が生じたと判定する危険反応判定手段と、
前記危険反応が生じた時点の前後において、前記撮像手段により撮像された前記車両の周辺の動画像を解析して、周辺に存在する移動体及び/又は固定物とを分類する周辺状況解析手段と、
この周辺状況解析手段によって分類された前記移動体及び/又は固定物について、前記車両を基準とする移動速度と移動方向とを検出し、前記位置取得手段によって取得された前記車両の位置と共に記録する危険反応地点記録手段とを備えることを特徴とする危険反応地点記録システム。
【請求項2】
前記危険反応判定手段は、前記車両操作データが示す異常操作データの種類に応じて、前記危険反応の種類を分類することを特徴とする請求項1記載の危険反応地点記録システム。
【請求項3】
地図データが記録されている地図データベースを備え、
前記危険反応地点記録手段は、前記危険反応が生じた時点に前記車両が位置している箇所の地図データを前記地図データベースより取得して記録することを特徴とする請求項1又は2記載の危険反応地点記録システム。
【請求項4】
前記車両周辺の環境状態を示すデータを取得する環境データ取得手段と、
前記危険反応判定手段によって危険反応が生じた時点に取得された前記環境状態データに基づいて、前記車両周辺の環境状態を判定する周辺環境判定手段とを備え、
前記危険反応地点記録手段は、周辺環境判定手段によって判定された前記車両周辺の環境状態も記録することを特徴とする請求項1乃至3の何れかに記載の危険反応地点記録システム。
【請求項5】
外部の管理センタとの間で通信を行なう通信手段と、
前記危険反応地点記録手段によって記録された情報を、前記通信手段を介して定期的に前記管理センタに送信する通信制御手段とを備えたことを特徴とする請求項1乃至4の何れかに記載の危険反応地点記録システム。
【請求項6】
請求項1乃至5の何れかに記載の危険反応地点記録システムを備え、
前記危険反応判定手段が、前記生体反応データが平均的な状態から所定値を超えて変化した場合、及び/又は、前記車両操作データが異常操作と認められるデータを示した場合に、運転者に対して警告を与えることを特徴とする運転支援システム。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−47914(P2007−47914A)
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願番号】特願2005−229480(P2005−229480)
【出願日】平成17年8月8日(2005.8.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願日】平成17年8月8日(2005.8.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]