
移載装置
【課題】エンドエフェクタの周回速度や周回位置を個別に制御可能な移載装置において、各エンドエフェクタの支持剛性を確保し易い優れた構造の移載装置を提供すること。
【解決手段】引渡ユニット10は、同一円周上で序列を維持しながら互いに独立して周回可能な複数のエンドエフェクタ13と、複数のエンドエフェクタ13のうちのいずれかを保持する外輪142、及び構造部材により支持された内輪141よりなり、エンドエフェクタ13の周回軸CLに沿って並列して配設された複数の軸受14と、回転伝達部材171を介して接続された回転モータ170の回転駆動力により外輪142を回転駆動可能なように各軸受14に対応して設けられた駆動部17と、を備えている。駆動部17のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に回転伝達部材171が貫通配置されている。
【解決手段】引渡ユニット10は、同一円周上で序列を維持しながら互いに独立して周回可能な複数のエンドエフェクタ13と、複数のエンドエフェクタ13のうちのいずれかを保持する外輪142、及び構造部材により支持された内輪141よりなり、エンドエフェクタ13の周回軸CLに沿って並列して配設された複数の軸受14と、回転伝達部材171を介して接続された回転モータ170の回転駆動力により外輪142を回転駆動可能なように各軸受14に対応して設けられた駆動部17と、を備えている。駆動部17のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に回転伝達部材171が貫通配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送ユニットにより搬送されたワークを他の搬送ユニットに引き渡す移載装置に関する。
【背景技術】
【0002】
従来より、例えば、略同一円周上を周回する複数のエンドエフェクタを備えた移載装置が提案されている(例えば、特許文献1参照。)。この移載装置では、各エンドエフェクタの周回動作を個別に制御可能とすることで、異なる搬送ユニット間におけるワークの移載精度や移載速度を高めている。
【0003】
この移載装置の技術的な特徴は、エンドエフェクタの周回軸に沿って並列配置された複数の軸受の支持構造にある。この支持構造では、複数の軸受のうち軸方向の端部に位置する軸受の内輪又は外輪が構造部材に固定されている一方、他の内輪あるいは外輪が連結部材を介して隣り合う軸受の外輪あるいは内輪と連結されている。つまり、この支持構造では、軸方向の両端の軸受の内輪あるいは外輪が構造部材によって支持されているのみであり、他の軸受は軸方向に隣り合う軸受によって支持されている。
【0004】
この移載装置では、構造部材に固定されておらず回転可能な外輪にエンドエフェクタが固定されている。外輪を回転駆動すれば、対応するエンドエフェクタを周回させることが可能である。各エンドエフェクタは、他のエンドエフェクタを追い抜くことはできないが、周回速度や周回位置を個別に制御可能となっている。
【0005】
しかしながら、上記従来の移載装置では、次のような問題がある。エンドエフェクタの周回動作を支持する軸受が他の軸受から支持されている持ち合いの支持構造であるため、エンドエフェクタの支持剛性を確保して周回精度を十分に確保するため、あるいは各エンドエフェクタの支持剛性のばらつきを抑制して制御性を向上するためには、技術的な工夫や設計ノウハウが必要となってくる。
【0006】
【特許文献1】特開2004−265920号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明は、上記従来の問題点に鑑みてなされたものであり、エンドエフェクタの周回速度や周回位置を個別に制御可能な移載装置において、各エンドエフェクタの支持剛性を確保し易い優れた構造の移載装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
本発明は、ワークを保持して搬送する第1及び第2の搬送ユニットと、上記第1の搬送ユニットから受け取ったワークを上記第2の搬送ユニットに引き渡す引渡ユニットと、を含む移載装置において、
上記引渡ユニットは、上記ワークを保持可能であって、かつ、保持する上記ワークを略同一円周上で周回させ得るように構成された複数のエンドエフェクタと、
上記複数のエンドエフェクタのうちのいずれかを直接的又は間接的に保持する外輪、及び構造部材により直接的又は間接的に支持された内輪を有し、上記エンドエフェクタの周回軸に沿って並列して配設された複数の軸受と、
回転伝達部材を介して接続された回転モータの回転駆動力により上記外輪を回転駆動可能なように上記各軸受に対応して設けられた駆動部と、を備え、
上記各エンドエフェクタが、周回序列を維持する一方、いずれか他のエンドエフェクタから独立して周回可能なように構成されており、
上記駆動部のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に上記回転伝達部材が貫通配置されていると共に、上記周回軸の軸方向において当該他の軸受を通り越して上記対応する軸受から離れた位置に上記回転モータが配置されていることを特徴とする移載装置にある(請求項1)。
【0009】
本発明の移載装置が備える上記引渡ユニットは、上記エンドエフェクタを保持する上記外輪を含む上記複数の軸受と、上記外輪を回転駆動可能なように上記各軸受に対応して設けられた上記駆動部とを備えている。この引渡ユニットでは、上記各軸受が上記内輪を介して上記構造部材に支持されている。それ故、上記引渡ユニットによれば、上記各軸受を剛性高く支持可能である。そして、剛性高く支持された軸受によれば、上記エンドエフェクタを剛性高く支持して周回精度を向上でき、上記第1の搬送ユニットから上記第2の搬送ユニットに向けて上記ワークを引き渡す際の精度を確保し易くなる。
【0010】
さらに、上記引渡ユニットでは、少なくともいずれかの駆動部が備える上記回転伝達部材が、対応する軸受以外の他の軸受の内周側に貫通配置されている。このように上記回転伝達部材を貫通配置すれば、当該回転伝達部材を介して連結される上記回転モータの配置自由度を高く確保できる。上記移載装置では、上記回転モータの配置場所が、例えば、対応する上記軸受の内周側や、当該軸受と隣り合う軸受との間の隙間のスペースに制限されることがない。このように上記回転モータを配置する上での制約を解消できれば、上記複数の軸受を上記周回軸の軸方向に接近して配置することが可能になる。
【0011】
以上のように、本発明の移載装置は、上記エンドエフェクタを周回させる上記駆動部の設計自由度を高く確保しつつ、上記エンドエフェクタの支持剛性を確保し易いという優れた構造の上記引渡ユニットを備えている。この移載装置によれば、上記第1の搬送ユニットから上記第2の搬送ユニットに向けて上記ワークを精度良く移載することが可能である。
【0012】
さらに、上記引渡ユニットは、上記エンドエフェクタの周回を支持する上記複数の軸受を上記周回軸の軸方向に接近して配置できる。上記複数の軸受を上記周回軸に沿って接近して配置すれば、上記エンドエフェクタによる上記ワークの保持位置から当該エンドエフェクタを保持する上記外輪までの距離の違いを抑制できる。この距離の違いを抑制できれば、上記各エンドエフェクタの支持剛性を均一に近づけることで制御性の違いを抑制でき、上記移載装置全体での制御性を向上可能である。
【0013】
本発明においては、上記複数の軸受のうち、上記軸方向における一方の端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも上記一方の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記一方の端部の軸受に対応する上記駆動部の上記回転伝達部材については、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、全て、上記一方の端部の軸受を上記軸方向に通り越えて他方の端部から離れる位置に配置されていることが好ましい(請求項2)。
【0014】
また、上記複数の軸受を上記軸方向に区分した一方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該一方の片側の端部に近く位置する全ての軸受の内周側を貫通しており、
上記一方の片側とは反対側の他方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該他方の片側の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記複数の軸受のうち、上記軸方向における両端部の軸受に対応する駆動部の上記回転伝達部材は、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、上記軸方向における上記複数の軸受の両外側に配置されていることが好ましい(請求項3)。
【0015】
これらの場合には、上記軸方向における上記複数の軸受の外側(片側あるいは両外側)に上記各回転モータを配置できるようになる。上記軸方向に隣り合う軸受の間隙等に上記回転モータを配置する必要がなくなれば、上記軸方向において上記複数の軸受を接近して配置できるようになる。さらに、上記複数の軸受の外側に上記各回転モータを配置できれば、当該各回転モータに接続する電力線や制御線等の引き回しが容易となり得る。
【0016】
また、上記移載装置は、上記各エンドエフェクタが周回する際の周回速度及び周回位置を制御するための制御ユニットを有し、
該制御ユニットは、上記第1の搬送ユニットから上記ワークを受け取る際に上記第1の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御すると共に、
上記第2の搬送ユニットに上記ワークを引き渡す際に上記第2の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御することが好ましい(請求項4)。
【0017】
この場合には、上記第1の搬送ユニットから上記ワークを受け取る際、及び上記第2の搬送ユニットに上記ワークを引き渡す際、上記エンドエフェクタと上記各搬送ユニットとの相対速度を略ゼロにできる。相対速度がゼロの状態で上記ワークの受け取り、あるいは引き渡しを行えば、上記ワークを移載する際の位置精度が確保し易くなる。さらに、受け取りあるいは引き渡しの際に上記ワークに作用するおそれがある応力を抑制でき、当該ワークに何らかのトラブルが発生するおそれを未然に抑制できる。なお、上記相対速度が略ゼロの状態とは、上記搬送速度と上記周回速度との速度差が上記搬送速度の±10%以内であって上記相対速度による影響をほぼ無視できるような状態を意味している。
【0018】
また、上記第1及び第2の搬送ユニットは、略円柱状の回転体の外周面、あるいは前進駆動されるコンベアベルトの表面に直接的又は間接的に上記ワークを載置して搬送することが好ましい(請求項5)。
ここで、上記回転体等の表面に上記ワークを間接的に載置する状態は、例えば、上記ワークを保持可能なキャリアや、上記ワークを受け渡しする相手部材を介して上記ワークを搬送する状態を意味している。一方、上記回転体等の表面に上記ワークを直接的に載置する状態は、上記のようなキャリアや他の部材を介在せずに上記ワークを搬送する状態を意味している。
【0019】
また、上記第1の搬送ユニットは、上記ワークを保持可能なキャリアを介して上記ワークを搬送するように構成されており、
上記第2の搬送ユニットは、上記ワークを接合する相手部材である相手ワークの表面に配置された状態で上記ワークを搬送することが好ましい(請求項6)。
【0020】
この場合には、上記キャリアに保持された状態で搬送されてきた上記ワークを上記相手ワークに対して供給できる。上記キャリアによって上記ワークを保持すれば、上記第1の搬送ユニットによる上記ワークの搬送中にトラブルが生じるおそれを未然に抑制できる。そして、上記ワークを上記相手ワークに供給すれば、上記第2の搬送ユニットによる上記ワークの搬送中にトラブルを生じるおそれを未然に抑制できる。さらに、上記相手ワークにおける所定の取付位置に上記ワークを配置すれば、上記ワーク及び上記相手ワークを含む製品の組み立てに上記移載装置を活用できるようになる。
【0021】
また、上記ワークは、シート状のチップ保持基材の表面に電子部品を実装したインターポーザであり、上記相手ワークは、上記インターポーザを接合するための電子基板であることが好ましい(請求項7)。
この場合には、上記電子基板に対して、上記インターポーザを順次、供給できるようになる。
【0022】
なお、上記チップ保持基材、あるいは上記電子基板は、例えば、PET(ポリエチレンテレフタレート)フィルム、PPS(ポリフェニレンサルファイド)樹脂、PLA(ポリ乳酸)樹脂、汎用エンプラ等の合成樹脂や、紙や、不織布や、アルミ箔、銅箔等の金属材料や、ガラス等の材料より形成することができる。なお、上記チップ保持基材の材質と、上記電子基板の材質とは、同じ材質の組み合わせでも良く、異なる材質の組み合わせであっても良い。
【0023】
また、上記インターポーザは、RF−IDメディア用のICチップを実装しており、上記電子基板は、上記ICチップと電気的に接続されるアンテナパターンが形成されていることが好ましい。ここで、RF−IDとは、Radio-Frequency IDentificationの略である。この場合には、上記電子基板に対して上記インターポーザを効率良く供給することで、上記電子基板に上記インターポーザを接合したRF−IDメディア等を効率良く製造できる可能性がある。
【0024】
また、上記ワーク及び上記相手ワークは、サニタリー製品の構成部品であることが好ましい(請求項8)。
この場合には、上記サニタリー製品の製造装置の一部として上記移載装置を利用できるようになる。上記サニタリー製品としては、紙おむつや、生理用ナプキン等がある。上記ワークと上記相手ワークとの組み合わせとしては、接着テープと吸水パッドとの組み合わせや、吸水パッドと保持シートとの組み合わせ等、様々な組み合わせがある。
【発明を実施するための最良の形態】
【0025】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例1)
本例は、電子部品5の製造装置2の一部を構成する移載装置1に関する例である。この内容について、図1〜図10を用いて説明する。
本例の移載装置1は、図1〜図3に示すごとく、ワーク50(本例ではインターポーザ。以下、インターポーザ50という。)を保持して搬送する第1及び第2の搬送ユニット11、12と、第1の搬送ユニット11から受け取ったインターポーザ50を第2の搬送ユニット12に引き渡す引渡ユニット10と、を含む装置である。
引渡ユニット10は、インターポーザ50を保持可能であって、かつ、保持するインターポーザ50を同一円周上で周回させ得る複数のエンドエフェクタ13と、この複数のエンドエフェクタ13のうちのいずれかを直接的又は間接的に保持する外輪142、及び構造部材により直接的又は間接的に支持された内輪141を有し、エンドエフェクタ13の周回軸CLに沿って並列して配設された複数の軸受14と、回転伝達部材171を介して接続された回転モータ170の回転駆動力により外輪142を回転駆動可能なように各軸受14に対応して設けられた駆動部17と、を備えている。
各エンドエフェクタ13が、周回序列を維持する一方、いずれか他のエンドエフェクタから独立して周回可能である。
駆動部17のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に回転伝達部材171が貫通配置されていると共に、周回軸CLの軸方向において当該他の軸受を通り越して対応する軸受から離れた位置に回転モータ170が配置されている。
以下、この内容について詳しく説明する。
【0026】
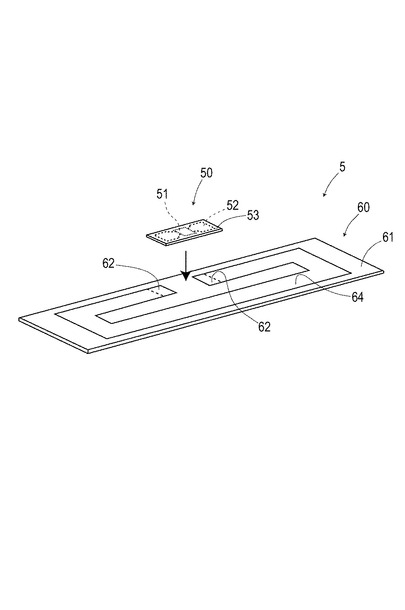
まず、本例の移載装置1を利用して製造する電子部品5について説明する。電子部品5は、図4に示すごとく、非接触ID用のRF−IDメディアである(以下、適宜RF−IDメディア5と記載する。)。このRF−IDメディア5は、半導体チップ51としてRF−ID用のICチップ(以下、ICチップ51と記載する。)を実装したインターポーザ50と、アンテナパターン64を設けたベース回路シート60(電子基板)とを積層した電子部品である。
【0027】
インターポーザ50は、図4に示すごとく、PSF(ポリスルホン)よりなる厚さ200μmのシート状のチップ保持基材53の表面にICチップ51を実装した電子部品である。チップ保持基材53の表面には、ICチップ51の電極パッド(図示略)と電気的に接続される導電パッド(図示略)と、この導電パッドから延設されたインターポーザ側端子52とが形成されている。なお、本例の導電パッド及びインターポーザ側端子52は、導電性インクによる印刷パターンにより形成されている。
【0028】
なお、チップ保持基材53の材質としては、本例のPSFに代えて、PC(ポリカーボネート)、加工紙等を採用することもできる。また、導電パッドと電極パッドとの電気的な接続箇所を保護するため、アンダーフィル材やポッティング材等を利用することも良い。また、インターポーザ側端子52等の形成方法としては、本例の導電性インクを印刷する方法に代えて、銅エッチング、ディスペンス、金属箔貼り付け、金属の直接蒸着、金属蒸着膜転写、導電性高分子層形成等の方法を採用することもできる。
【0029】
ベース回路シート60は、図4に示すごとく、PETよりなる厚さ100μmの熱可塑性のベース基材61の表面にアンテナパターン64を設けたシート状の電子基板である。アンテナパターン64は、1カ所において途切れた不完全な環状を呈するように形成された導電性インクによる印刷パターンである。上記1カ所の途切れ部分をなす両端部には、インターポーザ側端子52と電気的に接続されるベース側端子62が形成されている。
【0030】
なお、インターポーザ側端子52と同様、導電性インクよりなるアンテナパターン64に代えて、銅エッチング箔、ディスペンス、金属箔貼り付け、金属の直接蒸着、金属蒸着膜転写、導電性高分子層形成などの方法に形成されたアンテナパターン64を採用することもできる。また、ベース基材61の材質としては、本例のPETのほか、PET−G、PC、PP(ポリプロピレン)、ナイロン、紙等を採用できる。さらに、導電性インクのインク材料としては、銀、黒鉛、塩化銀、銅、ニッケル等を採用できる。
【0031】
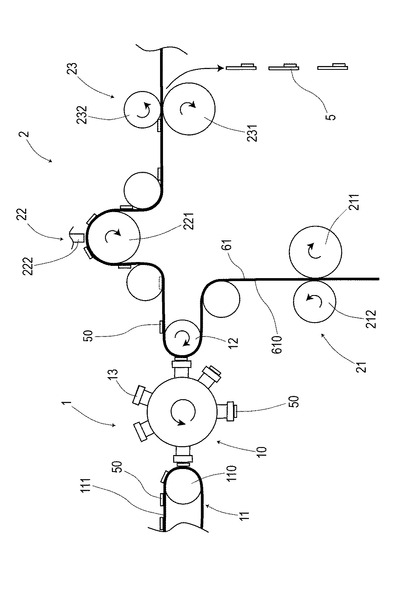
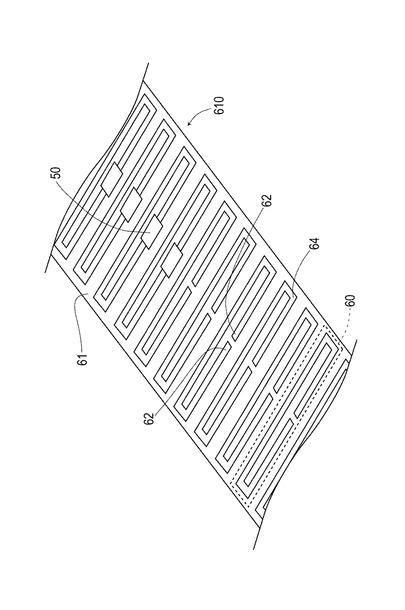
このRF−IDメディア5の製造工程は、ベース基材61が連なる連続シート状の連続ベース基材610にアンテナパターン64を形成するベース回路形成ステップと、連続ベース基材610の表面にインターポーザ50を配置する配置ステップと、連続ベース基材610に対してインターポーザ50を接合する接合ステップと、インターポーザ50を接合した連続ベース基材610からRF−IDメディア5を切り出す分離ステップと、を含む製造工程である。この製造工程は、図3に示す製造装置2により実施される。
【0032】
ベース回路形成ステップは、図3〜図5に示すごとく、連続ベース基材610の表面に略一定間隔を空けてアンテナパターン64を連続的に形成するステップである。ベース回路形成ステップは、連続ベース基材610を前進駆動する回転ローラ211と、連続ベース基材610を介して回転ローラ211に外接するスタンプローラ212とを備えた印刷ユニット21により実施される。スタンプローラ212は、アンテナパターン64に対応する印刷パターンが設定された印刷ローラである。なお、アンテナパターン64毎に連続ベース基材610を分離したものが上記ベース回路シート60である。
【0033】
配置ステップは、図3〜図5に示すごとく、連続ベース基材610の各アンテナパターン64にインターポーザ50を配置するステップである。この配置ステップは、本例の移載装置1を利用して実行される。配置ステップでは、ベース側端子62とインターポーザ側端子52とが相互に対面するように連続ベース基材610の表面にインターポーザ50を順次、配置する。なお、移載装置1の構成、及び配置ステップの内容については、後で詳しく説明する。
【0034】
接合ステップは、図3〜図5に示すごとく、ベース回路シート60(連続ベース基材610)に対してインターポーザ50を接合するステップである。接合ステップは、アンビルローラ221と接合ヘッド222とを備えたプレスユニット22により実施される。本例では、ベース側端子62とインターポーザ側端子52との圧接箇所に超音波振動を作用することで両者を溶着させている。
【0035】
分離ステップは、図3〜図5に示すごとく、連続ベース基材610を分離して個々のRF−IDメディア5を得るステップである。分離ステップは、アンビルローラ231とダイカットローラ232とを備えたカッティングユニット23により実施される。カッティングユニット23によれば、連続ベース基材610から個片化されたRF−IDメディア5を切り出し可能である。
【0036】
次に、上記配置ステップを実施する移載装置1の構成、及び配置ステップの内容について説明する。
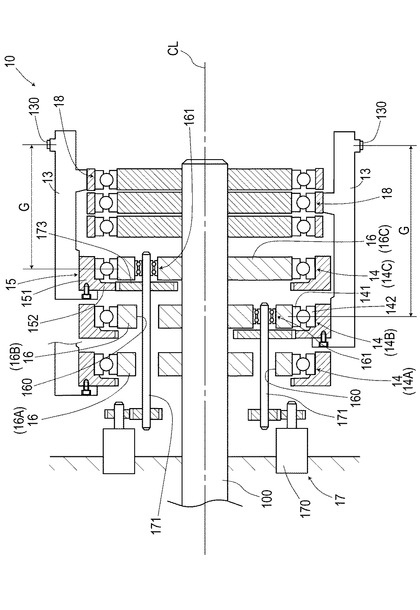
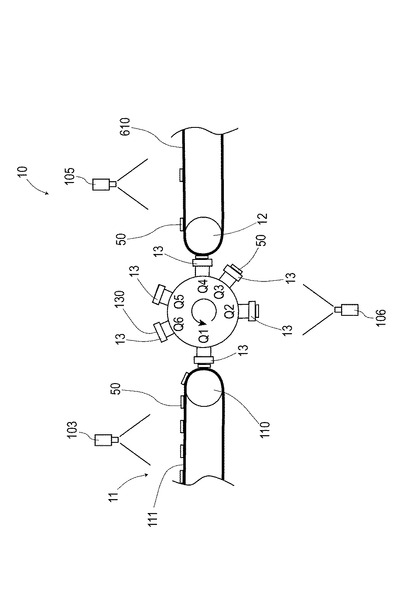
移載装置1は、図1〜図3を参照して上記したごとく、引渡ユニット10に対してインターポーザ50を供給する第1の搬送ユニット11、ベース回路シート60が連なる連続ベース基材610を搬送する第2の搬送ユニット12、及び連続ベース基材610の表面にインターポーザ50を順次、配置する引渡ユニット10を備えている。なお、本例の移載装置1では、図6及び図7に示すごとく、6基のエンドエフェクタ13が略同一円周上を周回するよう、2基の引渡ユニット10が同軸上に対向配置されている。
【0037】
第1の搬送ユニット11は、図3に示すごとく、引渡ユニット10に向けてインターポーザ50を連続的に供給するコンベア(以下、コンベア11という。)である。コンベア11は、略円柱状の回転ローラ110に保持されたコンベアベルト111の表面に対して個片状のインターポーザ50を保持可能である。コンベア11は、コンベアベルト111の表面に設けられた孔(図示略)を負圧にしてインターポーザ50を吸着する一方、インターポーザ50を引渡ユニット10に引き渡す際、孔を正圧に切り換えて吸着解除する。なお、第1の搬送ユニット11としては、インターポーザ50を保持可能なキャリア等を介してインターポーザ50を搬送するユニットを採用することもできる。
【0038】
第2の搬送ユニット12は、図3に示すごとく、インターポーザ50を配置する相手ワーク(電子基板)であるベース回路シート60が連なる連続ベース基材610を搬送する略円柱状の搬送ローラ(以下、アンビルローラ12という。)である。アンビルローラ12は、略円柱状の外周面に連続ベース基材610を保持しながら回転することで、連続ベース基材610を前進させる。
【0039】
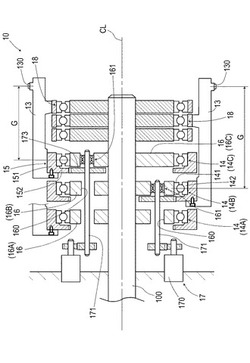
引渡ユニット10は、図1〜図5に示すごとく、コンベア11からインターポーザ50を受け取り、ベース回路シート60(連続ベース基材610)の表面に順次、配置するためのユニットである。引渡ユニット10は、同一円周上で序列を維持しながら互いに独立して周回可能な3基のエンドエフェクタ13と、構造部材である支持シャフト100と、エンドエフェクタ13を保持する外輪142及び支持シャフト100側に固定された内輪141を含む3基の軸受14と、回転伝達部材171を介して接続された回転モータ170の回転駆動力により外輪142を回転駆動する駆動部17と、を備えている。なお、上記のごとく本例では、2基の引渡ユニット10が同軸上に対向配置され(図7参照。)、6基のエンドエフェクタ13が略同一円周上を周回する(図6参照。)。
【0040】
支持シャフト100は、図1及び図2に示すごとく、周回軸CLに沿うよう、引渡ユニット10の枠体(図示略)に固定的に支持された構造部材である。支持シャフト100は、断面略円筒状を呈する中空構造の軸体である。支持シャフト100は、枠体に支持された後端側の端面に貫通孔(図示略)を有している。中空部に連通する貫通孔に対しては、図示しない真空ポンプの吸入ポートが接続されている。中空部は、真空ポンプの作用により負圧に保持されている。
【0041】
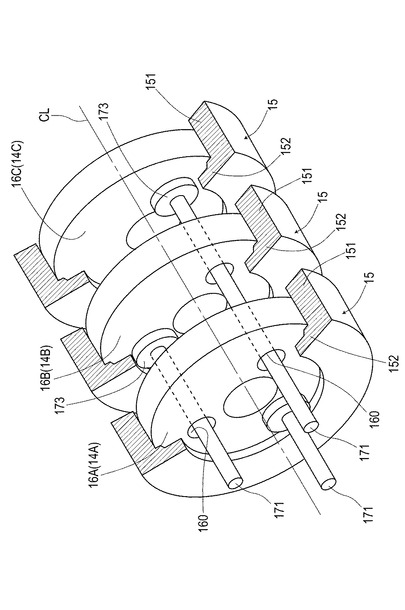
支持シャフト100に対しては、周回軸CLの軸方向に沿う略等間隔の3箇所に略円盤状の支持板16が外挿固定されている。支持板16の外周側には、エンドエフェクタ13を保持する回転リング15が軸受14を介して回転可能な状態で支持されている。回転リング15は、内周面にギア歯を設けた略円板状のギア部152と、軸受14を内挿する略円筒状の軸受嵌合部151とを軸方向に組み合わせた形状を呈する。ギア部152及び軸受嵌合部151は、略同一外径を呈する一方、内径については、ギア部152の方が小さくなっている。なお、図2は、回転リング15、支持板16、回転伝達部材171等の構造を斜視図により模式的に図示した図である。同図では、エンドエフェクタ13や支持シャフト100等の図示が省略されていると共に、軸受14と支持板16とが区別なく一体的に図示されている。
【0042】
エンドエフェクタ13は、図1〜図3及び図5〜図7に示すごとく、インターポーザ50を保持しながら周回する棒状の部品である。エンドエフェクタ13は、周回軸CLと略平行をなすように回転リング15の外周側に固定されている。エンドエフェクタ13は、周回中に、コンベア11からインターポーザ50を受け取り、アンビルローラ12側に引き渡す。エンドエフェクタ13は、ベース側端子62とインターポーザ側端子52とが対面するよう、ベース回路シート60(連続ベース基材610)の表面にインターポーザ50を配置する。さらに、エンドエフェクタ13の先端側は、支持シャフト100に支持された軸受18により周回支持されている。
【0043】
図1、図3、図6及び図7に示すごとく、エンドエフェクタ13の先端には、インターポーザ50を吸着して保持するための保持面130が設けられている。この保持面130には、支持シャフト100の中空部に連通する空気圧制御のための孔131が開口している。孔131は、エンドエフェクタ13、軸受14、支持板16を経由するように設けられた図示しない圧力路を介して支持シャフト100の中空部に連通している。なお、軸受14には、エンドエフェクタ13が所定の周回区間にあるときに圧力路を大気開放させるための連通孔が形成されている。保持面130の圧力は、圧力路が大気開放されるか否かに応じて大気圧(正圧)、あるいは負圧に制御される。エンドエフェクタ13は、保持面130が負圧に設定された際、インターポーザ50を負圧吸着できる一方、保持面130が大気圧(正圧)に設定された際、保持するインターポーザ50を吸着解除できる。
【0044】
駆動部17は、図1及び図2に示すごとく、軸受14の外輪142を回転させるための回転伝達部材171と、回転伝達部材171を回転駆動するための回転モータ(汎用サーボ制御系原動機)170とを備えている。回転伝達部材171の端部には、回転リング15のギア部152にギア係合する歯車173が外挿固定されている。引渡ユニット10では、回転モータ170の回転が回転伝達部材171を介して伝達されて回転リング15及び外輪142が回転し、回転リング15の回転に伴ってエンドエフェクタ13が周回する。引渡ユニット10では、各エンドエフェクタ13が固定された回転リング15が別々の回転モータ170により個別に回転駆動されるため、エンドエフェクタ13の周回動作を独立して制御可能となっている。
【0045】
上記支持板16のうち、エンドエフェクタ13の後端側の端部の支持板16Aは、図1及び図2に示すごとく、回転伝達部材171を軸支する軸受161、及び他の2本の回転伝達部材171を貫通させるための貫通孔160が周方向120度間隔で配置されている。軸方向における中間に配置された支持板16Bは、回転伝達部材171を軸支する軸受161及び他の1本の回転伝達部材171を貫通させるための貫通孔160が周方向180度間隔で配置されている。エンドエフェクタ13の先端側の端部の支持板16Cは、回転伝達部材171を軸支する軸受161のみが配置され、他の回転伝達部材171を貫通させる貫通孔は未形成である。なお、支持板16Cには、軸方向の一方の端部の軸受14Cが外挿され、支持板16Bには、軸方向の中間に配置された軸受14Bが外挿され、支持板16Aには、軸方向の他方の端部の軸受14Aが外挿されている。
【0046】
支持板16に穿孔された貫通孔160によれば、図1及び図2に示すごとく、支持板16に外挿された軸受14の内周側に回転伝達部材171を貫通配置させることができる。具体的には、後端側の端部の軸受14Aではない軸受14Bに対応する回転伝達部材171については、対応する軸受14Bよりも後端側に位置する軸受14Aの内周側を貫通している。また、軸受14Cに対応する回転伝達部材171については、対応する軸受14Cよりも後端側に位置する軸受14A及びBの内周側を貫通している。一方、後端側の端部の軸受14Aについては、対応する回転伝達部材171が他の軸受14B、Cの内周側を貫通していない。
【0047】
このように軸受14の内周側を回転伝達部材171が貫通する構造を採用した本例の引渡ユニット10では、並列配置された3基の軸受14A〜C(支持板16A〜C)に対して軸方向の外側に、各エンドエフェクタ13に対応する回転モータ170を集約的に配置可能である。軸方向に隣り合う軸受14の間隙に回転モータ170を配置する必要がなくなるため、軸受14を軸方向に接近して配置できるようになっている。軸受14を軸方向に接近させれば、軸受14からエンドエフェクタ13の保持面130までの距離G(図1)の違いを抑制できる。距離Gの違いを抑制すれば各エンドエフェクタ13の支持剛性を均一に近づけ、制御性の違いを抑制可能である。なお、本例の移載装置1では、図7に示すごとく、上記のように構成された引渡ユニット10が同軸上に対向配置されている。そのため、本例の移載装置1では、全部で6基の軸受14(支持板16)に対して軸方向の両外側に回転モータ170が3基ずつ配置されることになる。
【0048】
さらに、本例の移載装置1は、図8に示すごとく、コンベア11によるインターポーザ50の搬送状態を撮影して画像データを得るための撮像装置(計測部)103を備えている。本例では、この画像データについて画像処理を施し、インターポーザ50の搬送位置及び搬送速度を検出する。そして、図示しない制御手段は、検出した搬送位置及び搬送速度に基づいて、各エンドエフェクタ13の周回運動を制御する。
【0049】
加えて、本例の移載装置1は、図8に示すごとく、エンドエフェクタ13によるインターポーザ50の保持状態を撮影する撮像装置(計測部)106と、アンビルローラ12に保持された連続ベース基材610を撮影する撮像装置(計測部)105とを備えている。撮像装置106により撮影した画像データに基づけば、例えば、インターポーザ50の搬送間隔の異常や、その姿勢異常や、異物の存在等の異常検出が可能である。また、撮像装置105によれば、連続ベース基材610の表面に配設した各アンテナパターン64の搬送速度や、搬送位置や、パターン異常等を検出できる。なお、撮像手段103、105、106に代えて、より低コストな光学式センサを適用することもできる。
【0050】
次に、上記のように構成された移載装置1における各エンドエフェクタ13の周回動作について説明する。各エンドエフェクタ13は、図9に示すごとく、インターポーザ50の受け取りと引き渡しを含む周回中に、それぞれ独立に周期変速制御される。各エンドエフェクタ13に対しては、それぞれ、周回中において、インターポーザ50の受け取りと引き渡しのためのタイミング調整(周回位置調整)、及び周回速度を調整するための周期変速制御が施される。
【0051】
各エンドエフェクタ13は、コンベア11の搬送動作に同期し、相対速度が略ゼロの状態でコンベア11からインターポーザ50を受け取る。その後、各エンドエフェクタ13は、アンビルローラ12の回転動作に同期し、相対速度が略ゼロの状態でアンビルローラ12に保持された連続ベース基材610にインターポーザ50を配置する(図5参照。)。
【0052】
例えば、図8に示す移載装置1の作動状態は、周回位置Q1のエンドエフェクタ13がコンベア11からインターポーザ50を受け取る一方、周回位置Q2、Q3のエンドエフェクタ13がアンビルローラ12に向けて移動中である。そして、周回位置Q4のエンドエフェクタ13がベース回路シート60(連続ベース基材610)にインターポーザ50を配置したところである。また、周回位置Q5、Q6のエンドエフェクタ13は、周回位置Q1に向けて周回中の状態である。
【0053】
ここで、本例の引渡ユニット10では、エンドエフェクタ13の周回位置に応じて保持面130の吸着力が制御されている。周回位置Q1からQ4の手前までの周回区間においては、保持面130が負圧に制御されている。それ故、この周回区間では、保持面130にインターポーザ50を吸着できる。一方、周回位置Q4では、上記圧力路が大気開放され、保持面130が大気圧に制御される。それ故、周回位置Q4に到達したとき、インターポーザ50を吸着解除して連続ベース基材610に引き渡しできる。
【0054】
図9は、エンドエフェクタ13の周回角度の時間変化を示す図である。各曲線C1〜C6は、各エンドエフェクタ13に対応している。また、時間t1におけるグラフ上の点q1〜q6は図8における周回位置Q1〜Q6に対応する。同図中、コンベア11に対してエンドエフェクタ13が外接する周回位置Q1を周回角度θの原点とし、周回方向は反時計回りとする。
【0055】
同図中の周期T1は、コンベア11がエンドエフェクタ13にインターポーザ50を供給する周期(インターポーザ供給周期)である。なお、このインターポーザ供給周期は、コンベア11の搬送速度と、コンベアベルト111上のインターポーザ50の間隔により決定される。また、周期T2は、各エンドエフェクタ13が周回する周期である。短時間ではT2≒6×T1の関係が成立し、長時間における平均ではT2=6×T1である。本例では、独立に周回制御される6基のエンドエフェクタ13を用いている。それ故、本例の引渡ユニット10では、個々のエンドエフェクタ13の周回速度に対して約6倍のインターポーザ供給速度に対応可能である。
【0056】
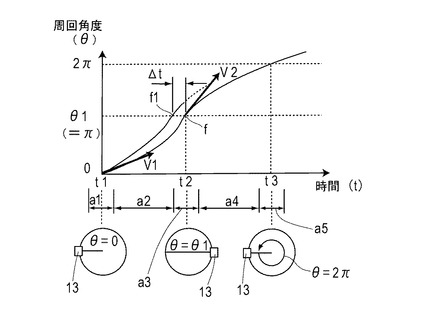
図10は、いずれか1基のエンドエフェクタ13の周回角度の時間変化を示す図である。このエンドエフェクタ13は、時刻t=t1、周回角度θ=0のとき、速度V1でインターポーザ50をコンベア11から受け取る。そして、時刻t=t2、周回角度θ=θ1(=π)のとき、速度V2でインターポーザ50をアンビルローラ12に引き渡す。その後、時刻t=t3(=t1+T2)、周回角度2πにおいて初期位置に復帰する。
【0057】
時間区間a1、a3、a5は、インターポーザ50の受け取り、あるいは引き渡しのため、コンベア11、あるいはアンビルローラ12の搬送動作に同期した区間である。これらの時間区間では、インターポーザ50の搬送速度との相対速度略ゼロとするよう、周回速度が略一定に保持される区間である。一方、時間区間a2、a4は、エンドエフェクタ13の周回速度が増速あるいは減速される区間である。
【0058】
時間区間a2、a4では、周回速度の調整の他に周回位置の調整が行われる。周回位置の調整は、例えば、アンビルローラ12による搬送速度が変動した場合に実施される。アンビルローラ12の搬送速度が変動したときに一定の搬送間隔を維持するためには、引渡ユニット10からアンビルローラ12にインターポーザ50を引き渡すタイミングを調整する必要がある。そこで、このタイミングを調整するために、各エンドエフェクタ13の周回位置の調整が実施される。
【0059】
仮に、図10に示すごとく、時間△tだけ早めにインターポーザ50を引き渡す必要が発生したとする。この場合には、エンドエフェクタ13の周回速度を増速することにより、同図に示す曲線が点fに代えて点f1を通るようにする。これにより、アンビルローラ12に保持された連続ベース基材610上のアンテナパターン64に対して、インターポーザ50を精度良く配置することができる。
【0060】
以上のように本例の移載装置1を利用すれば、ベース回路シート60にインターポーザ50を配置する配置ステップを非常に高速、かつ高精度に実施でき、これにより高品質なRF−IDメディア5の製造が可能となる。
特に、本例の引渡ユニット10は、エンドエフェクタ13の周回動作を支持する3基の軸受14A〜Cを軸方向に接近して配置でき、それ故、周回軸CL方向の寸法を短縮可能である。軸受14A〜Cを軸方向に近づければ、各軸受14(外輪142)から保持面130までの距離の違いを抑制できる。この距離の違いが大きくなると各エンドエフェクタ13の支持剛性が変動するおそれがある一方、上記距離の違いを抑制できれば各エンドエフェクタ13の支持剛性を均一に近づけることができる。各エンドエフェクタ13の支持剛性を均一化できれば、各エンドエフェクタ13の制御性の違いを抑制でき、移載装置1全体の制御性を向上できる。
【0061】
なお、本例の移載装置1は、RF−IDメディア5の製造に限らず、インターポーザ50を利用した各種の電子部品の製造工程に利用可能である。移載装置1は、例えば、FPC(フレキシブルプリント基板)、ペーパーコンピュータ、ICカード、使い捨て電気製品など様々な電子部品の製造工程において活用することができる。
【0062】
さらに、例えば、ICチップ(ワーク)をチップ保持基材(相手ワーク)に対して配置するように移載装置を構成すれば、インターポーザ自体の製造工程にも適用可能となる。さらにまた、紙おむつや、生理用品などのサニタリー製品の製造工程に用いる製造装置の一部として本例の移載装置を採用することもできる。例えば、サニタリー製品の場合のワークと相手ワークとの組み合わせとしては、接着テープと吸水パッドシート、吸水パッドと保持シートとの組み合わせ等、様々な組み合わせがある。
【0063】
なお、本例では、図7に示すごとく引渡ユニット10を同軸上で対向配置しているが、これに代えて、支持シャフト100を軸方向に延長し、2基の引渡ユニット10の間で1本の支持シャフト100を共用することも良い。この場合には、支持シャフト100の両端を支持可能となり、各エンドエフェクタ13の支持剛性の確保が一層、容易となる。
【0064】
さらになお、本願発明の技術的範囲には含まれないが、図11に示すごとく、回転リング15を回転駆動するためのダイレクトドライブモータ17Dを採用した構造も考えられる。各回転リング15の内周側に配置されたダイレクトドライブモータ17Dによれば、対応する回転リング15を直接駆動できる。軸方向の寸法に余裕がある場合には、このようにダイレクトドライブモータを採用した構造が有効となる可能性もあり得る。
【0065】
本例のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【図面の簡単な説明】
【0066】
【図1】実施例1における、引渡ユニットの断面構造を示す断面図。
【図2】実施例1における、引渡ユニットの一部構造を示す斜視図。
【図3】実施例1における、移載装置を含むRF−IDメディアの製造装置を示す説明図。
【図4】実施例1における、RF−IDメディアの構造を示す組立図。
【図5】実施例1における、配置ステップの内容を説明する説明図。
【図6】実施例1における、同一円周上を周回するエンドエフェクタを示す説明図。
【図7】実施例1における、同軸上に対向配置された2基の引渡ユニットを示す断面図。
【図8】実施例1における、連続ベース基材にインターポーザを配置する様子を示す説明図。
【図9】実施例1における、全てのエンドエフェクタの周回動作を説明するグラフ。
【図10】実施例1における、1基のエンドエフェクタの周回動作を説明するグラフ。
【図11】参考例における、引渡ユニットの断面構造を示す断面図。
【符号の説明】
【0067】
1 移載装置
10 引渡ユニット
100 支持シャフト
11 第1の搬送ユニット(コンベア)
12 第2の搬送ユニット(アンビルローラ)
13 エンドエフェクタ
14 軸受
141 内輪
142 外輪
15 回転リング
151 軸受嵌合部
152 ギア部
16 支持板
160 貫通孔
17 駆動部
170 回転モータ
171 回転伝達部材
5 電子部品(RF−IDメディア)
50 インターポーザ
60 ベース回路シート
61 ベース基材
610 連続ベース基材
【技術分野】
【0001】
本発明は、搬送ユニットにより搬送されたワークを他の搬送ユニットに引き渡す移載装置に関する。
【背景技術】
【0002】
従来より、例えば、略同一円周上を周回する複数のエンドエフェクタを備えた移載装置が提案されている(例えば、特許文献1参照。)。この移載装置では、各エンドエフェクタの周回動作を個別に制御可能とすることで、異なる搬送ユニット間におけるワークの移載精度や移載速度を高めている。
【0003】
この移載装置の技術的な特徴は、エンドエフェクタの周回軸に沿って並列配置された複数の軸受の支持構造にある。この支持構造では、複数の軸受のうち軸方向の端部に位置する軸受の内輪又は外輪が構造部材に固定されている一方、他の内輪あるいは外輪が連結部材を介して隣り合う軸受の外輪あるいは内輪と連結されている。つまり、この支持構造では、軸方向の両端の軸受の内輪あるいは外輪が構造部材によって支持されているのみであり、他の軸受は軸方向に隣り合う軸受によって支持されている。
【0004】
この移載装置では、構造部材に固定されておらず回転可能な外輪にエンドエフェクタが固定されている。外輪を回転駆動すれば、対応するエンドエフェクタを周回させることが可能である。各エンドエフェクタは、他のエンドエフェクタを追い抜くことはできないが、周回速度や周回位置を個別に制御可能となっている。
【0005】
しかしながら、上記従来の移載装置では、次のような問題がある。エンドエフェクタの周回動作を支持する軸受が他の軸受から支持されている持ち合いの支持構造であるため、エンドエフェクタの支持剛性を確保して周回精度を十分に確保するため、あるいは各エンドエフェクタの支持剛性のばらつきを抑制して制御性を向上するためには、技術的な工夫や設計ノウハウが必要となってくる。
【0006】
【特許文献1】特開2004−265920号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明は、上記従来の問題点に鑑みてなされたものであり、エンドエフェクタの周回速度や周回位置を個別に制御可能な移載装置において、各エンドエフェクタの支持剛性を確保し易い優れた構造の移載装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
本発明は、ワークを保持して搬送する第1及び第2の搬送ユニットと、上記第1の搬送ユニットから受け取ったワークを上記第2の搬送ユニットに引き渡す引渡ユニットと、を含む移載装置において、
上記引渡ユニットは、上記ワークを保持可能であって、かつ、保持する上記ワークを略同一円周上で周回させ得るように構成された複数のエンドエフェクタと、
上記複数のエンドエフェクタのうちのいずれかを直接的又は間接的に保持する外輪、及び構造部材により直接的又は間接的に支持された内輪を有し、上記エンドエフェクタの周回軸に沿って並列して配設された複数の軸受と、
回転伝達部材を介して接続された回転モータの回転駆動力により上記外輪を回転駆動可能なように上記各軸受に対応して設けられた駆動部と、を備え、
上記各エンドエフェクタが、周回序列を維持する一方、いずれか他のエンドエフェクタから独立して周回可能なように構成されており、
上記駆動部のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に上記回転伝達部材が貫通配置されていると共に、上記周回軸の軸方向において当該他の軸受を通り越して上記対応する軸受から離れた位置に上記回転モータが配置されていることを特徴とする移載装置にある(請求項1)。
【0009】
本発明の移載装置が備える上記引渡ユニットは、上記エンドエフェクタを保持する上記外輪を含む上記複数の軸受と、上記外輪を回転駆動可能なように上記各軸受に対応して設けられた上記駆動部とを備えている。この引渡ユニットでは、上記各軸受が上記内輪を介して上記構造部材に支持されている。それ故、上記引渡ユニットによれば、上記各軸受を剛性高く支持可能である。そして、剛性高く支持された軸受によれば、上記エンドエフェクタを剛性高く支持して周回精度を向上でき、上記第1の搬送ユニットから上記第2の搬送ユニットに向けて上記ワークを引き渡す際の精度を確保し易くなる。
【0010】
さらに、上記引渡ユニットでは、少なくともいずれかの駆動部が備える上記回転伝達部材が、対応する軸受以外の他の軸受の内周側に貫通配置されている。このように上記回転伝達部材を貫通配置すれば、当該回転伝達部材を介して連結される上記回転モータの配置自由度を高く確保できる。上記移載装置では、上記回転モータの配置場所が、例えば、対応する上記軸受の内周側や、当該軸受と隣り合う軸受との間の隙間のスペースに制限されることがない。このように上記回転モータを配置する上での制約を解消できれば、上記複数の軸受を上記周回軸の軸方向に接近して配置することが可能になる。
【0011】
以上のように、本発明の移載装置は、上記エンドエフェクタを周回させる上記駆動部の設計自由度を高く確保しつつ、上記エンドエフェクタの支持剛性を確保し易いという優れた構造の上記引渡ユニットを備えている。この移載装置によれば、上記第1の搬送ユニットから上記第2の搬送ユニットに向けて上記ワークを精度良く移載することが可能である。
【0012】
さらに、上記引渡ユニットは、上記エンドエフェクタの周回を支持する上記複数の軸受を上記周回軸の軸方向に接近して配置できる。上記複数の軸受を上記周回軸に沿って接近して配置すれば、上記エンドエフェクタによる上記ワークの保持位置から当該エンドエフェクタを保持する上記外輪までの距離の違いを抑制できる。この距離の違いを抑制できれば、上記各エンドエフェクタの支持剛性を均一に近づけることで制御性の違いを抑制でき、上記移載装置全体での制御性を向上可能である。
【0013】
本発明においては、上記複数の軸受のうち、上記軸方向における一方の端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも上記一方の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記一方の端部の軸受に対応する上記駆動部の上記回転伝達部材については、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、全て、上記一方の端部の軸受を上記軸方向に通り越えて他方の端部から離れる位置に配置されていることが好ましい(請求項2)。
【0014】
また、上記複数の軸受を上記軸方向に区分した一方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該一方の片側の端部に近く位置する全ての軸受の内周側を貫通しており、
上記一方の片側とは反対側の他方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該他方の片側の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記複数の軸受のうち、上記軸方向における両端部の軸受に対応する駆動部の上記回転伝達部材は、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、上記軸方向における上記複数の軸受の両外側に配置されていることが好ましい(請求項3)。
【0015】
これらの場合には、上記軸方向における上記複数の軸受の外側(片側あるいは両外側)に上記各回転モータを配置できるようになる。上記軸方向に隣り合う軸受の間隙等に上記回転モータを配置する必要がなくなれば、上記軸方向において上記複数の軸受を接近して配置できるようになる。さらに、上記複数の軸受の外側に上記各回転モータを配置できれば、当該各回転モータに接続する電力線や制御線等の引き回しが容易となり得る。
【0016】
また、上記移載装置は、上記各エンドエフェクタが周回する際の周回速度及び周回位置を制御するための制御ユニットを有し、
該制御ユニットは、上記第1の搬送ユニットから上記ワークを受け取る際に上記第1の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御すると共に、
上記第2の搬送ユニットに上記ワークを引き渡す際に上記第2の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御することが好ましい(請求項4)。
【0017】
この場合には、上記第1の搬送ユニットから上記ワークを受け取る際、及び上記第2の搬送ユニットに上記ワークを引き渡す際、上記エンドエフェクタと上記各搬送ユニットとの相対速度を略ゼロにできる。相対速度がゼロの状態で上記ワークの受け取り、あるいは引き渡しを行えば、上記ワークを移載する際の位置精度が確保し易くなる。さらに、受け取りあるいは引き渡しの際に上記ワークに作用するおそれがある応力を抑制でき、当該ワークに何らかのトラブルが発生するおそれを未然に抑制できる。なお、上記相対速度が略ゼロの状態とは、上記搬送速度と上記周回速度との速度差が上記搬送速度の±10%以内であって上記相対速度による影響をほぼ無視できるような状態を意味している。
【0018】
また、上記第1及び第2の搬送ユニットは、略円柱状の回転体の外周面、あるいは前進駆動されるコンベアベルトの表面に直接的又は間接的に上記ワークを載置して搬送することが好ましい(請求項5)。
ここで、上記回転体等の表面に上記ワークを間接的に載置する状態は、例えば、上記ワークを保持可能なキャリアや、上記ワークを受け渡しする相手部材を介して上記ワークを搬送する状態を意味している。一方、上記回転体等の表面に上記ワークを直接的に載置する状態は、上記のようなキャリアや他の部材を介在せずに上記ワークを搬送する状態を意味している。
【0019】
また、上記第1の搬送ユニットは、上記ワークを保持可能なキャリアを介して上記ワークを搬送するように構成されており、
上記第2の搬送ユニットは、上記ワークを接合する相手部材である相手ワークの表面に配置された状態で上記ワークを搬送することが好ましい(請求項6)。
【0020】
この場合には、上記キャリアに保持された状態で搬送されてきた上記ワークを上記相手ワークに対して供給できる。上記キャリアによって上記ワークを保持すれば、上記第1の搬送ユニットによる上記ワークの搬送中にトラブルが生じるおそれを未然に抑制できる。そして、上記ワークを上記相手ワークに供給すれば、上記第2の搬送ユニットによる上記ワークの搬送中にトラブルを生じるおそれを未然に抑制できる。さらに、上記相手ワークにおける所定の取付位置に上記ワークを配置すれば、上記ワーク及び上記相手ワークを含む製品の組み立てに上記移載装置を活用できるようになる。
【0021】
また、上記ワークは、シート状のチップ保持基材の表面に電子部品を実装したインターポーザであり、上記相手ワークは、上記インターポーザを接合するための電子基板であることが好ましい(請求項7)。
この場合には、上記電子基板に対して、上記インターポーザを順次、供給できるようになる。
【0022】
なお、上記チップ保持基材、あるいは上記電子基板は、例えば、PET(ポリエチレンテレフタレート)フィルム、PPS(ポリフェニレンサルファイド)樹脂、PLA(ポリ乳酸)樹脂、汎用エンプラ等の合成樹脂や、紙や、不織布や、アルミ箔、銅箔等の金属材料や、ガラス等の材料より形成することができる。なお、上記チップ保持基材の材質と、上記電子基板の材質とは、同じ材質の組み合わせでも良く、異なる材質の組み合わせであっても良い。
【0023】
また、上記インターポーザは、RF−IDメディア用のICチップを実装しており、上記電子基板は、上記ICチップと電気的に接続されるアンテナパターンが形成されていることが好ましい。ここで、RF−IDとは、Radio-Frequency IDentificationの略である。この場合には、上記電子基板に対して上記インターポーザを効率良く供給することで、上記電子基板に上記インターポーザを接合したRF−IDメディア等を効率良く製造できる可能性がある。
【0024】
また、上記ワーク及び上記相手ワークは、サニタリー製品の構成部品であることが好ましい(請求項8)。
この場合には、上記サニタリー製品の製造装置の一部として上記移載装置を利用できるようになる。上記サニタリー製品としては、紙おむつや、生理用ナプキン等がある。上記ワークと上記相手ワークとの組み合わせとしては、接着テープと吸水パッドとの組み合わせや、吸水パッドと保持シートとの組み合わせ等、様々な組み合わせがある。
【発明を実施するための最良の形態】
【0025】
本発明の実施の形態につき、以下の実施例を用いて具体的に説明する。
(実施例1)
本例は、電子部品5の製造装置2の一部を構成する移載装置1に関する例である。この内容について、図1〜図10を用いて説明する。
本例の移載装置1は、図1〜図3に示すごとく、ワーク50(本例ではインターポーザ。以下、インターポーザ50という。)を保持して搬送する第1及び第2の搬送ユニット11、12と、第1の搬送ユニット11から受け取ったインターポーザ50を第2の搬送ユニット12に引き渡す引渡ユニット10と、を含む装置である。
引渡ユニット10は、インターポーザ50を保持可能であって、かつ、保持するインターポーザ50を同一円周上で周回させ得る複数のエンドエフェクタ13と、この複数のエンドエフェクタ13のうちのいずれかを直接的又は間接的に保持する外輪142、及び構造部材により直接的又は間接的に支持された内輪141を有し、エンドエフェクタ13の周回軸CLに沿って並列して配設された複数の軸受14と、回転伝達部材171を介して接続された回転モータ170の回転駆動力により外輪142を回転駆動可能なように各軸受14に対応して設けられた駆動部17と、を備えている。
各エンドエフェクタ13が、周回序列を維持する一方、いずれか他のエンドエフェクタから独立して周回可能である。
駆動部17のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に回転伝達部材171が貫通配置されていると共に、周回軸CLの軸方向において当該他の軸受を通り越して対応する軸受から離れた位置に回転モータ170が配置されている。
以下、この内容について詳しく説明する。
【0026】
まず、本例の移載装置1を利用して製造する電子部品5について説明する。電子部品5は、図4に示すごとく、非接触ID用のRF−IDメディアである(以下、適宜RF−IDメディア5と記載する。)。このRF−IDメディア5は、半導体チップ51としてRF−ID用のICチップ(以下、ICチップ51と記載する。)を実装したインターポーザ50と、アンテナパターン64を設けたベース回路シート60(電子基板)とを積層した電子部品である。
【0027】
インターポーザ50は、図4に示すごとく、PSF(ポリスルホン)よりなる厚さ200μmのシート状のチップ保持基材53の表面にICチップ51を実装した電子部品である。チップ保持基材53の表面には、ICチップ51の電極パッド(図示略)と電気的に接続される導電パッド(図示略)と、この導電パッドから延設されたインターポーザ側端子52とが形成されている。なお、本例の導電パッド及びインターポーザ側端子52は、導電性インクによる印刷パターンにより形成されている。
【0028】
なお、チップ保持基材53の材質としては、本例のPSFに代えて、PC(ポリカーボネート)、加工紙等を採用することもできる。また、導電パッドと電極パッドとの電気的な接続箇所を保護するため、アンダーフィル材やポッティング材等を利用することも良い。また、インターポーザ側端子52等の形成方法としては、本例の導電性インクを印刷する方法に代えて、銅エッチング、ディスペンス、金属箔貼り付け、金属の直接蒸着、金属蒸着膜転写、導電性高分子層形成等の方法を採用することもできる。
【0029】
ベース回路シート60は、図4に示すごとく、PETよりなる厚さ100μmの熱可塑性のベース基材61の表面にアンテナパターン64を設けたシート状の電子基板である。アンテナパターン64は、1カ所において途切れた不完全な環状を呈するように形成された導電性インクによる印刷パターンである。上記1カ所の途切れ部分をなす両端部には、インターポーザ側端子52と電気的に接続されるベース側端子62が形成されている。
【0030】
なお、インターポーザ側端子52と同様、導電性インクよりなるアンテナパターン64に代えて、銅エッチング箔、ディスペンス、金属箔貼り付け、金属の直接蒸着、金属蒸着膜転写、導電性高分子層形成などの方法に形成されたアンテナパターン64を採用することもできる。また、ベース基材61の材質としては、本例のPETのほか、PET−G、PC、PP(ポリプロピレン)、ナイロン、紙等を採用できる。さらに、導電性インクのインク材料としては、銀、黒鉛、塩化銀、銅、ニッケル等を採用できる。
【0031】
このRF−IDメディア5の製造工程は、ベース基材61が連なる連続シート状の連続ベース基材610にアンテナパターン64を形成するベース回路形成ステップと、連続ベース基材610の表面にインターポーザ50を配置する配置ステップと、連続ベース基材610に対してインターポーザ50を接合する接合ステップと、インターポーザ50を接合した連続ベース基材610からRF−IDメディア5を切り出す分離ステップと、を含む製造工程である。この製造工程は、図3に示す製造装置2により実施される。
【0032】
ベース回路形成ステップは、図3〜図5に示すごとく、連続ベース基材610の表面に略一定間隔を空けてアンテナパターン64を連続的に形成するステップである。ベース回路形成ステップは、連続ベース基材610を前進駆動する回転ローラ211と、連続ベース基材610を介して回転ローラ211に外接するスタンプローラ212とを備えた印刷ユニット21により実施される。スタンプローラ212は、アンテナパターン64に対応する印刷パターンが設定された印刷ローラである。なお、アンテナパターン64毎に連続ベース基材610を分離したものが上記ベース回路シート60である。
【0033】
配置ステップは、図3〜図5に示すごとく、連続ベース基材610の各アンテナパターン64にインターポーザ50を配置するステップである。この配置ステップは、本例の移載装置1を利用して実行される。配置ステップでは、ベース側端子62とインターポーザ側端子52とが相互に対面するように連続ベース基材610の表面にインターポーザ50を順次、配置する。なお、移載装置1の構成、及び配置ステップの内容については、後で詳しく説明する。
【0034】
接合ステップは、図3〜図5に示すごとく、ベース回路シート60(連続ベース基材610)に対してインターポーザ50を接合するステップである。接合ステップは、アンビルローラ221と接合ヘッド222とを備えたプレスユニット22により実施される。本例では、ベース側端子62とインターポーザ側端子52との圧接箇所に超音波振動を作用することで両者を溶着させている。
【0035】
分離ステップは、図3〜図5に示すごとく、連続ベース基材610を分離して個々のRF−IDメディア5を得るステップである。分離ステップは、アンビルローラ231とダイカットローラ232とを備えたカッティングユニット23により実施される。カッティングユニット23によれば、連続ベース基材610から個片化されたRF−IDメディア5を切り出し可能である。
【0036】
次に、上記配置ステップを実施する移載装置1の構成、及び配置ステップの内容について説明する。
移載装置1は、図1〜図3を参照して上記したごとく、引渡ユニット10に対してインターポーザ50を供給する第1の搬送ユニット11、ベース回路シート60が連なる連続ベース基材610を搬送する第2の搬送ユニット12、及び連続ベース基材610の表面にインターポーザ50を順次、配置する引渡ユニット10を備えている。なお、本例の移載装置1では、図6及び図7に示すごとく、6基のエンドエフェクタ13が略同一円周上を周回するよう、2基の引渡ユニット10が同軸上に対向配置されている。
【0037】
第1の搬送ユニット11は、図3に示すごとく、引渡ユニット10に向けてインターポーザ50を連続的に供給するコンベア(以下、コンベア11という。)である。コンベア11は、略円柱状の回転ローラ110に保持されたコンベアベルト111の表面に対して個片状のインターポーザ50を保持可能である。コンベア11は、コンベアベルト111の表面に設けられた孔(図示略)を負圧にしてインターポーザ50を吸着する一方、インターポーザ50を引渡ユニット10に引き渡す際、孔を正圧に切り換えて吸着解除する。なお、第1の搬送ユニット11としては、インターポーザ50を保持可能なキャリア等を介してインターポーザ50を搬送するユニットを採用することもできる。
【0038】
第2の搬送ユニット12は、図3に示すごとく、インターポーザ50を配置する相手ワーク(電子基板)であるベース回路シート60が連なる連続ベース基材610を搬送する略円柱状の搬送ローラ(以下、アンビルローラ12という。)である。アンビルローラ12は、略円柱状の外周面に連続ベース基材610を保持しながら回転することで、連続ベース基材610を前進させる。
【0039】
引渡ユニット10は、図1〜図5に示すごとく、コンベア11からインターポーザ50を受け取り、ベース回路シート60(連続ベース基材610)の表面に順次、配置するためのユニットである。引渡ユニット10は、同一円周上で序列を維持しながら互いに独立して周回可能な3基のエンドエフェクタ13と、構造部材である支持シャフト100と、エンドエフェクタ13を保持する外輪142及び支持シャフト100側に固定された内輪141を含む3基の軸受14と、回転伝達部材171を介して接続された回転モータ170の回転駆動力により外輪142を回転駆動する駆動部17と、を備えている。なお、上記のごとく本例では、2基の引渡ユニット10が同軸上に対向配置され(図7参照。)、6基のエンドエフェクタ13が略同一円周上を周回する(図6参照。)。
【0040】
支持シャフト100は、図1及び図2に示すごとく、周回軸CLに沿うよう、引渡ユニット10の枠体(図示略)に固定的に支持された構造部材である。支持シャフト100は、断面略円筒状を呈する中空構造の軸体である。支持シャフト100は、枠体に支持された後端側の端面に貫通孔(図示略)を有している。中空部に連通する貫通孔に対しては、図示しない真空ポンプの吸入ポートが接続されている。中空部は、真空ポンプの作用により負圧に保持されている。
【0041】
支持シャフト100に対しては、周回軸CLの軸方向に沿う略等間隔の3箇所に略円盤状の支持板16が外挿固定されている。支持板16の外周側には、エンドエフェクタ13を保持する回転リング15が軸受14を介して回転可能な状態で支持されている。回転リング15は、内周面にギア歯を設けた略円板状のギア部152と、軸受14を内挿する略円筒状の軸受嵌合部151とを軸方向に組み合わせた形状を呈する。ギア部152及び軸受嵌合部151は、略同一外径を呈する一方、内径については、ギア部152の方が小さくなっている。なお、図2は、回転リング15、支持板16、回転伝達部材171等の構造を斜視図により模式的に図示した図である。同図では、エンドエフェクタ13や支持シャフト100等の図示が省略されていると共に、軸受14と支持板16とが区別なく一体的に図示されている。
【0042】
エンドエフェクタ13は、図1〜図3及び図5〜図7に示すごとく、インターポーザ50を保持しながら周回する棒状の部品である。エンドエフェクタ13は、周回軸CLと略平行をなすように回転リング15の外周側に固定されている。エンドエフェクタ13は、周回中に、コンベア11からインターポーザ50を受け取り、アンビルローラ12側に引き渡す。エンドエフェクタ13は、ベース側端子62とインターポーザ側端子52とが対面するよう、ベース回路シート60(連続ベース基材610)の表面にインターポーザ50を配置する。さらに、エンドエフェクタ13の先端側は、支持シャフト100に支持された軸受18により周回支持されている。
【0043】
図1、図3、図6及び図7に示すごとく、エンドエフェクタ13の先端には、インターポーザ50を吸着して保持するための保持面130が設けられている。この保持面130には、支持シャフト100の中空部に連通する空気圧制御のための孔131が開口している。孔131は、エンドエフェクタ13、軸受14、支持板16を経由するように設けられた図示しない圧力路を介して支持シャフト100の中空部に連通している。なお、軸受14には、エンドエフェクタ13が所定の周回区間にあるときに圧力路を大気開放させるための連通孔が形成されている。保持面130の圧力は、圧力路が大気開放されるか否かに応じて大気圧(正圧)、あるいは負圧に制御される。エンドエフェクタ13は、保持面130が負圧に設定された際、インターポーザ50を負圧吸着できる一方、保持面130が大気圧(正圧)に設定された際、保持するインターポーザ50を吸着解除できる。
【0044】
駆動部17は、図1及び図2に示すごとく、軸受14の外輪142を回転させるための回転伝達部材171と、回転伝達部材171を回転駆動するための回転モータ(汎用サーボ制御系原動機)170とを備えている。回転伝達部材171の端部には、回転リング15のギア部152にギア係合する歯車173が外挿固定されている。引渡ユニット10では、回転モータ170の回転が回転伝達部材171を介して伝達されて回転リング15及び外輪142が回転し、回転リング15の回転に伴ってエンドエフェクタ13が周回する。引渡ユニット10では、各エンドエフェクタ13が固定された回転リング15が別々の回転モータ170により個別に回転駆動されるため、エンドエフェクタ13の周回動作を独立して制御可能となっている。
【0045】
上記支持板16のうち、エンドエフェクタ13の後端側の端部の支持板16Aは、図1及び図2に示すごとく、回転伝達部材171を軸支する軸受161、及び他の2本の回転伝達部材171を貫通させるための貫通孔160が周方向120度間隔で配置されている。軸方向における中間に配置された支持板16Bは、回転伝達部材171を軸支する軸受161及び他の1本の回転伝達部材171を貫通させるための貫通孔160が周方向180度間隔で配置されている。エンドエフェクタ13の先端側の端部の支持板16Cは、回転伝達部材171を軸支する軸受161のみが配置され、他の回転伝達部材171を貫通させる貫通孔は未形成である。なお、支持板16Cには、軸方向の一方の端部の軸受14Cが外挿され、支持板16Bには、軸方向の中間に配置された軸受14Bが外挿され、支持板16Aには、軸方向の他方の端部の軸受14Aが外挿されている。
【0046】
支持板16に穿孔された貫通孔160によれば、図1及び図2に示すごとく、支持板16に外挿された軸受14の内周側に回転伝達部材171を貫通配置させることができる。具体的には、後端側の端部の軸受14Aではない軸受14Bに対応する回転伝達部材171については、対応する軸受14Bよりも後端側に位置する軸受14Aの内周側を貫通している。また、軸受14Cに対応する回転伝達部材171については、対応する軸受14Cよりも後端側に位置する軸受14A及びBの内周側を貫通している。一方、後端側の端部の軸受14Aについては、対応する回転伝達部材171が他の軸受14B、Cの内周側を貫通していない。
【0047】
このように軸受14の内周側を回転伝達部材171が貫通する構造を採用した本例の引渡ユニット10では、並列配置された3基の軸受14A〜C(支持板16A〜C)に対して軸方向の外側に、各エンドエフェクタ13に対応する回転モータ170を集約的に配置可能である。軸方向に隣り合う軸受14の間隙に回転モータ170を配置する必要がなくなるため、軸受14を軸方向に接近して配置できるようになっている。軸受14を軸方向に接近させれば、軸受14からエンドエフェクタ13の保持面130までの距離G(図1)の違いを抑制できる。距離Gの違いを抑制すれば各エンドエフェクタ13の支持剛性を均一に近づけ、制御性の違いを抑制可能である。なお、本例の移載装置1では、図7に示すごとく、上記のように構成された引渡ユニット10が同軸上に対向配置されている。そのため、本例の移載装置1では、全部で6基の軸受14(支持板16)に対して軸方向の両外側に回転モータ170が3基ずつ配置されることになる。
【0048】
さらに、本例の移載装置1は、図8に示すごとく、コンベア11によるインターポーザ50の搬送状態を撮影して画像データを得るための撮像装置(計測部)103を備えている。本例では、この画像データについて画像処理を施し、インターポーザ50の搬送位置及び搬送速度を検出する。そして、図示しない制御手段は、検出した搬送位置及び搬送速度に基づいて、各エンドエフェクタ13の周回運動を制御する。
【0049】
加えて、本例の移載装置1は、図8に示すごとく、エンドエフェクタ13によるインターポーザ50の保持状態を撮影する撮像装置(計測部)106と、アンビルローラ12に保持された連続ベース基材610を撮影する撮像装置(計測部)105とを備えている。撮像装置106により撮影した画像データに基づけば、例えば、インターポーザ50の搬送間隔の異常や、その姿勢異常や、異物の存在等の異常検出が可能である。また、撮像装置105によれば、連続ベース基材610の表面に配設した各アンテナパターン64の搬送速度や、搬送位置や、パターン異常等を検出できる。なお、撮像手段103、105、106に代えて、より低コストな光学式センサを適用することもできる。
【0050】
次に、上記のように構成された移載装置1における各エンドエフェクタ13の周回動作について説明する。各エンドエフェクタ13は、図9に示すごとく、インターポーザ50の受け取りと引き渡しを含む周回中に、それぞれ独立に周期変速制御される。各エンドエフェクタ13に対しては、それぞれ、周回中において、インターポーザ50の受け取りと引き渡しのためのタイミング調整(周回位置調整)、及び周回速度を調整するための周期変速制御が施される。
【0051】
各エンドエフェクタ13は、コンベア11の搬送動作に同期し、相対速度が略ゼロの状態でコンベア11からインターポーザ50を受け取る。その後、各エンドエフェクタ13は、アンビルローラ12の回転動作に同期し、相対速度が略ゼロの状態でアンビルローラ12に保持された連続ベース基材610にインターポーザ50を配置する(図5参照。)。
【0052】
例えば、図8に示す移載装置1の作動状態は、周回位置Q1のエンドエフェクタ13がコンベア11からインターポーザ50を受け取る一方、周回位置Q2、Q3のエンドエフェクタ13がアンビルローラ12に向けて移動中である。そして、周回位置Q4のエンドエフェクタ13がベース回路シート60(連続ベース基材610)にインターポーザ50を配置したところである。また、周回位置Q5、Q6のエンドエフェクタ13は、周回位置Q1に向けて周回中の状態である。
【0053】
ここで、本例の引渡ユニット10では、エンドエフェクタ13の周回位置に応じて保持面130の吸着力が制御されている。周回位置Q1からQ4の手前までの周回区間においては、保持面130が負圧に制御されている。それ故、この周回区間では、保持面130にインターポーザ50を吸着できる。一方、周回位置Q4では、上記圧力路が大気開放され、保持面130が大気圧に制御される。それ故、周回位置Q4に到達したとき、インターポーザ50を吸着解除して連続ベース基材610に引き渡しできる。
【0054】
図9は、エンドエフェクタ13の周回角度の時間変化を示す図である。各曲線C1〜C6は、各エンドエフェクタ13に対応している。また、時間t1におけるグラフ上の点q1〜q6は図8における周回位置Q1〜Q6に対応する。同図中、コンベア11に対してエンドエフェクタ13が外接する周回位置Q1を周回角度θの原点とし、周回方向は反時計回りとする。
【0055】
同図中の周期T1は、コンベア11がエンドエフェクタ13にインターポーザ50を供給する周期(インターポーザ供給周期)である。なお、このインターポーザ供給周期は、コンベア11の搬送速度と、コンベアベルト111上のインターポーザ50の間隔により決定される。また、周期T2は、各エンドエフェクタ13が周回する周期である。短時間ではT2≒6×T1の関係が成立し、長時間における平均ではT2=6×T1である。本例では、独立に周回制御される6基のエンドエフェクタ13を用いている。それ故、本例の引渡ユニット10では、個々のエンドエフェクタ13の周回速度に対して約6倍のインターポーザ供給速度に対応可能である。
【0056】
図10は、いずれか1基のエンドエフェクタ13の周回角度の時間変化を示す図である。このエンドエフェクタ13は、時刻t=t1、周回角度θ=0のとき、速度V1でインターポーザ50をコンベア11から受け取る。そして、時刻t=t2、周回角度θ=θ1(=π)のとき、速度V2でインターポーザ50をアンビルローラ12に引き渡す。その後、時刻t=t3(=t1+T2)、周回角度2πにおいて初期位置に復帰する。
【0057】
時間区間a1、a3、a5は、インターポーザ50の受け取り、あるいは引き渡しのため、コンベア11、あるいはアンビルローラ12の搬送動作に同期した区間である。これらの時間区間では、インターポーザ50の搬送速度との相対速度略ゼロとするよう、周回速度が略一定に保持される区間である。一方、時間区間a2、a4は、エンドエフェクタ13の周回速度が増速あるいは減速される区間である。
【0058】
時間区間a2、a4では、周回速度の調整の他に周回位置の調整が行われる。周回位置の調整は、例えば、アンビルローラ12による搬送速度が変動した場合に実施される。アンビルローラ12の搬送速度が変動したときに一定の搬送間隔を維持するためには、引渡ユニット10からアンビルローラ12にインターポーザ50を引き渡すタイミングを調整する必要がある。そこで、このタイミングを調整するために、各エンドエフェクタ13の周回位置の調整が実施される。
【0059】
仮に、図10に示すごとく、時間△tだけ早めにインターポーザ50を引き渡す必要が発生したとする。この場合には、エンドエフェクタ13の周回速度を増速することにより、同図に示す曲線が点fに代えて点f1を通るようにする。これにより、アンビルローラ12に保持された連続ベース基材610上のアンテナパターン64に対して、インターポーザ50を精度良く配置することができる。
【0060】
以上のように本例の移載装置1を利用すれば、ベース回路シート60にインターポーザ50を配置する配置ステップを非常に高速、かつ高精度に実施でき、これにより高品質なRF−IDメディア5の製造が可能となる。
特に、本例の引渡ユニット10は、エンドエフェクタ13の周回動作を支持する3基の軸受14A〜Cを軸方向に接近して配置でき、それ故、周回軸CL方向の寸法を短縮可能である。軸受14A〜Cを軸方向に近づければ、各軸受14(外輪142)から保持面130までの距離の違いを抑制できる。この距離の違いが大きくなると各エンドエフェクタ13の支持剛性が変動するおそれがある一方、上記距離の違いを抑制できれば各エンドエフェクタ13の支持剛性を均一に近づけることができる。各エンドエフェクタ13の支持剛性を均一化できれば、各エンドエフェクタ13の制御性の違いを抑制でき、移載装置1全体の制御性を向上できる。
【0061】
なお、本例の移載装置1は、RF−IDメディア5の製造に限らず、インターポーザ50を利用した各種の電子部品の製造工程に利用可能である。移載装置1は、例えば、FPC(フレキシブルプリント基板)、ペーパーコンピュータ、ICカード、使い捨て電気製品など様々な電子部品の製造工程において活用することができる。
【0062】
さらに、例えば、ICチップ(ワーク)をチップ保持基材(相手ワーク)に対して配置するように移載装置を構成すれば、インターポーザ自体の製造工程にも適用可能となる。さらにまた、紙おむつや、生理用品などのサニタリー製品の製造工程に用いる製造装置の一部として本例の移載装置を採用することもできる。例えば、サニタリー製品の場合のワークと相手ワークとの組み合わせとしては、接着テープと吸水パッドシート、吸水パッドと保持シートとの組み合わせ等、様々な組み合わせがある。
【0063】
なお、本例では、図7に示すごとく引渡ユニット10を同軸上で対向配置しているが、これに代えて、支持シャフト100を軸方向に延長し、2基の引渡ユニット10の間で1本の支持シャフト100を共用することも良い。この場合には、支持シャフト100の両端を支持可能となり、各エンドエフェクタ13の支持剛性の確保が一層、容易となる。
【0064】
さらになお、本願発明の技術的範囲には含まれないが、図11に示すごとく、回転リング15を回転駆動するためのダイレクトドライブモータ17Dを採用した構造も考えられる。各回転リング15の内周側に配置されたダイレクトドライブモータ17Dによれば、対応する回転リング15を直接駆動できる。軸方向の寸法に余裕がある場合には、このようにダイレクトドライブモータを採用した構造が有効となる可能性もあり得る。
【0065】
本例のごとく本発明の具体例を詳細に説明したが、これらの具体例は、特許請求の範囲に包含される技術の一例を開示しているにすぎない。言うまでもなく、具体例の構成や数値等によって、特許請求の範囲が限定的に解釈されるべきではない。特許請求の範囲は、公知技術や当業者の知識等を利用して前記具体例を多様に変形あるいは変更した技術を包含している。
【図面の簡単な説明】
【0066】
【図1】実施例1における、引渡ユニットの断面構造を示す断面図。
【図2】実施例1における、引渡ユニットの一部構造を示す斜視図。
【図3】実施例1における、移載装置を含むRF−IDメディアの製造装置を示す説明図。
【図4】実施例1における、RF−IDメディアの構造を示す組立図。
【図5】実施例1における、配置ステップの内容を説明する説明図。
【図6】実施例1における、同一円周上を周回するエンドエフェクタを示す説明図。
【図7】実施例1における、同軸上に対向配置された2基の引渡ユニットを示す断面図。
【図8】実施例1における、連続ベース基材にインターポーザを配置する様子を示す説明図。
【図9】実施例1における、全てのエンドエフェクタの周回動作を説明するグラフ。
【図10】実施例1における、1基のエンドエフェクタの周回動作を説明するグラフ。
【図11】参考例における、引渡ユニットの断面構造を示す断面図。
【符号の説明】
【0067】
1 移載装置
10 引渡ユニット
100 支持シャフト
11 第1の搬送ユニット(コンベア)
12 第2の搬送ユニット(アンビルローラ)
13 エンドエフェクタ
14 軸受
141 内輪
142 外輪
15 回転リング
151 軸受嵌合部
152 ギア部
16 支持板
160 貫通孔
17 駆動部
170 回転モータ
171 回転伝達部材
5 電子部品(RF−IDメディア)
50 インターポーザ
60 ベース回路シート
61 ベース基材
610 連続ベース基材
【特許請求の範囲】
【請求項1】
ワークを保持して搬送する第1及び第2の搬送ユニットと、上記第1の搬送ユニットから受け取ったワークを上記第2の搬送ユニットに引き渡す引渡ユニットと、を含む移載装置において、
上記引渡ユニットは、上記ワークを保持可能であって、かつ、保持する上記ワークを略同一円周上で周回させ得るように構成された複数のエンドエフェクタと、
上記複数のエンドエフェクタのうちのいずれかを直接的又は間接的に保持する外輪、及び構造部材により直接的又は間接的に支持された内輪を有し、上記エンドエフェクタの周回軸に沿って並列して配設された複数の軸受と、
軸状の回転伝達部材を介して接続された回転モータの回転駆動力により上記外輪を回転駆動可能なように上記各軸受に対応して設けられた駆動部と、を備え、
上記各エンドエフェクタが、周回序列を維持する一方、いずれか他のエンドエフェクタから独立して周回可能なように構成されており、
上記駆動部のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に上記回転伝達部材が貫通配置されていると共に、上記周回軸の軸方向において当該他の軸受を通り越して上記対応する軸受から離れた位置に上記回転モータが配置されていることを特徴とする移載装置。
【請求項2】
請求項1において、上記複数の軸受のうち、上記軸方向における一方の端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも上記一方の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記一方の端部の軸受に対応する上記駆動部の上記回転伝達部材については、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、全て、上記一方の端部の軸受を上記軸方向に通り越えて他方の端部から離れる位置に配置されていることを特徴とする移載装置。
【請求項3】
請求項1において、上記複数の軸受を上記軸方向に区分した一方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該一方の片側の端部に近く位置する全ての軸受の内周側を貫通しており、
上記一方の片側とは反対側の他方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該他方の片側の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記複数の軸受のうち、上記軸方向における両端部の軸受に対応する駆動部の上記回転伝達部材は、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、上記軸方向における上記複数の軸受の両外側に配置されていることを特徴とする移載装置。
【請求項4】
請求項1〜3のいずれか1項において、上記移載装置は、上記各エンドエフェクタが周回する際の周回速度及び周回位置を制御するための制御ユニットを有し、
該制御ユニットは、上記第1の搬送ユニットから上記ワークを受け取る際に上記第1の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御すると共に、
上記第2の搬送ユニットに上記ワークを引き渡す際に上記第2の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御するように構成されていることを特徴とする移載装置。
【請求項5】
請求項1〜4のいずれか1項において、上記第1及び第2の搬送ユニットは、略円柱状の回転体の外周面、あるいは前進駆動されるコンベアベルトの表面に直接的又は間接的に上記ワークを載置して搬送するように構成されていることを特徴とする移載装置。
【請求項6】
請求項1〜5のいずれか1項において、上記第1の搬送ユニットは、上記ワークを保持可能なキャリアを介して上記ワークを搬送するように構成されており、
上記第2の搬送ユニットは、上記ワークを接合する相手部材である相手ワークの表面に配置された状態で上記ワークを搬送するように構成されていることを特徴とする移載装置。
【請求項7】
請求項6において、上記ワークは、シート状のチップ保持基材の表面に電子部品を実装したインターポーザであり、上記相手ワークは、上記インターポーザを接合するための電子基板であることを特徴とする移載装置。
【請求項8】
請求項6において、上記ワーク及び上記相手ワークは、サニタリー製品の構成部品であることを特徴とする移載装置。
【請求項1】
ワークを保持して搬送する第1及び第2の搬送ユニットと、上記第1の搬送ユニットから受け取ったワークを上記第2の搬送ユニットに引き渡す引渡ユニットと、を含む移載装置において、
上記引渡ユニットは、上記ワークを保持可能であって、かつ、保持する上記ワークを略同一円周上で周回させ得るように構成された複数のエンドエフェクタと、
上記複数のエンドエフェクタのうちのいずれかを直接的又は間接的に保持する外輪、及び構造部材により直接的又は間接的に支持された内輪を有し、上記エンドエフェクタの周回軸に沿って並列して配設された複数の軸受と、
軸状の回転伝達部材を介して接続された回転モータの回転駆動力により上記外輪を回転駆動可能なように上記各軸受に対応して設けられた駆動部と、を備え、
上記各エンドエフェクタが、周回序列を維持する一方、いずれか他のエンドエフェクタから独立して周回可能なように構成されており、
上記駆動部のうちの少なくともいずれかは、対応する軸受以外の他の軸受の内周側に上記回転伝達部材が貫通配置されていると共に、上記周回軸の軸方向において当該他の軸受を通り越して上記対応する軸受から離れた位置に上記回転モータが配置されていることを特徴とする移載装置。
【請求項2】
請求項1において、上記複数の軸受のうち、上記軸方向における一方の端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも上記一方の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記一方の端部の軸受に対応する上記駆動部の上記回転伝達部材については、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、全て、上記一方の端部の軸受を上記軸方向に通り越えて他方の端部から離れる位置に配置されていることを特徴とする移載装置。
【請求項3】
請求項1において、上記複数の軸受を上記軸方向に区分した一方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該一方の片側の端部に近く位置する全ての軸受の内周側を貫通しており、
上記一方の片側とは反対側の他方の片側に位置する軸受のうち、上記複数の軸受の上記軸方向における端部を除く軸受に対応する上記駆動部の上記回転伝達部材については、対応する軸受よりも当該他方の片側の端部に近く位置する全ての軸受の内周側を貫通している一方、
上記複数の軸受のうち、上記軸方向における両端部の軸受に対応する駆動部の上記回転伝達部材は、他の軸受の内周側を貫通しておらず、
上記各駆動部の回転モータは、上記軸方向における上記複数の軸受の両外側に配置されていることを特徴とする移載装置。
【請求項4】
請求項1〜3のいずれか1項において、上記移載装置は、上記各エンドエフェクタが周回する際の周回速度及び周回位置を制御するための制御ユニットを有し、
該制御ユニットは、上記第1の搬送ユニットから上記ワークを受け取る際に上記第1の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御すると共に、
上記第2の搬送ユニットに上記ワークを引き渡す際に上記第2の搬送ユニットによる搬送速度との相対速度が略ゼロとなるように上記エンドエフェクタの周回速度を制御するように構成されていることを特徴とする移載装置。
【請求項5】
請求項1〜4のいずれか1項において、上記第1及び第2の搬送ユニットは、略円柱状の回転体の外周面、あるいは前進駆動されるコンベアベルトの表面に直接的又は間接的に上記ワークを載置して搬送するように構成されていることを特徴とする移載装置。
【請求項6】
請求項1〜5のいずれか1項において、上記第1の搬送ユニットは、上記ワークを保持可能なキャリアを介して上記ワークを搬送するように構成されており、
上記第2の搬送ユニットは、上記ワークを接合する相手部材である相手ワークの表面に配置された状態で上記ワークを搬送するように構成されていることを特徴とする移載装置。
【請求項7】
請求項6において、上記ワークは、シート状のチップ保持基材の表面に電子部品を実装したインターポーザであり、上記相手ワークは、上記インターポーザを接合するための電子基板であることを特徴とする移載装置。
【請求項8】
請求項6において、上記ワーク及び上記相手ワークは、サニタリー製品の構成部品であることを特徴とする移載装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】
【図9】

【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−292618(P2009−292618A)
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願番号】特願2008−149499(P2008−149499)
【出願日】平成20年6月6日(2008.6.6)
【出願人】(302031502)株式会社 ハリーズ (16)
【Fターム(参考)】
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願日】平成20年6月6日(2008.6.6)
【出願人】(302031502)株式会社 ハリーズ (16)
【Fターム(参考)】
[ Back to top ]