
Fターム[3F072KD01]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | グリッパ付 (345)
Fターム[3F072KD01]の下位に属するFターム
Fターム[3F072KD01]に分類される特許
1 - 20 / 161
物品搬送装置
物品搬送方法及び物品搬送装置
【課題】物品や容器のサイズ或いは容器内への物品の詰め合わせ状態などに応じた複数の物品の供給形態に対応可能な物品搬送方法及び物品搬送装置を提供する。
【解決手段】所定間隔毎に搬送される物品搬送コンベヤ2上の複数の物品1を吸着手段で吸着し、所定間隔毎に搬送される容器搬送コンベヤ4の第一コンベヤ5上の容器3に各物品1を載置して該容器3と共に搬送する際に、指定手段により第一の制御プログラムに切り替えられた状態では複数の物品1の夫々に対応した位置に配備された吸着具が各物品1を夫々吸着してまとめて容器3の一つに載置し、また、指定手段により第二の制御プログラムに切り替えられた状態では物品1を夫々吸着している吸着具の間隔を容器搬送コンベヤ4の第一コンベヤ5上の複数の容器3の間隔に合わせて該複数の容器3に夫々の物品を載置する。
(もっと読む)
ロータリー式充填装置

【課題】異径缶兼用で、缶の剛性によって缶を保持する力の調整が容易な円形断面容器の搬送方法および装置を提供する。
【解決手段】ロータリー式フィラで液体が充填された缶1を次工程へ搬送するコンベヤに排出するように作用する固定加速アーム21と、固定の軸を支点として、閉時は固定加速アーム21側へ缶を挟んで保持するように作動し、開時は固定加速アーム21側から開かれて缶の保持を開放するように作動する揺動可能な可動アーム31とで搬送装置を構成し、固定加速アーム21の缶との係合面を取り扱う缶の最小径に相当する曲面にして、取り扱う缶の直径が大きい場合は該曲面の2点で接するようにし、可動アーム31の缶と係合する側が湾曲状で、取り扱う缶の直径が大きい時も小さい時も係合する箇所が可動アーム31の先端部近辺になるようにする。
(もっと読む)
パン型造粒機用の大塊処理装置
【課題】パン型造粒機において、その運転中に自動的に大塊を除去することが可能な塊処理装置を提供する。
【解決手段】回転して粉体を造粒するパン23が備えられたパン型造粒機21用の大塊処理装置1であって、大塊を掬い上げる掬上げ治具3と、先端に掬上げ治具3が着脱自在に取り付けられ、パン23の回転方向に沿って掬上げ治具3をパン23に挿入させて大塊を掬い上げさせるロボットアーム2と、を具備してなることを特徴とするパン型造粒機用の大塊処理装置1を採用する。
(もっと読む)
容器把持装置
【課題】ネック部にフランジ部のない容器であっても変形させることなく把持することのできる容器把持装置を提供すること。
【解決手段】容器2のネック部2bを把持する把持位置と開放する開放位置とを開閉移動自在な一対のグリッパ3a、3bを有する容器把持装置1であって、前記各グリッパ3a、3bの対向面部分に、前記把持位置に移動した際に、前記容器2のネック部2bの外面に当接して容器2を把持するとともに、前記容器2および内容物の自重更には外力を受けて鉛直下向きに変位することによってセルフロック機能を付加して把持力を増大させる把持力可変把持手段11a、11bを設けたことを特徴とする。
(もっと読む)
位置決め機構、位置決め方法および移載装置
【課題】部品の位置決めを行い移載する移載装置において、位置決めの基準となる辺に位置決めする部品を当接し位置決めを行う位置決め駆動機構を用いること無く、位置決め治具と部品とを当接させて部品を摺動させることで位置決めを行う位置決め機構と、この位置決め機構を搭載する移載装置を提供する。
【解決手段】部品が嵌合される切り欠け形状からなる嵌合部と、嵌合部の最深となる内底辺部と、内底辺部の両端に交わる内側辺部とを有し、内底辺部の幅と比較して切り欠け形状の開口部の幅が広い位置決め治具を備え、部品を開口部から内側辺部に沿って嵌合部に嵌合し、位置決めの基準となる内側辺部と内底辺部とに部品の外縁を水平方向に当接させることで、内側辺部と内底辺部とに倣って部品を水平方向に摺動させて位置決め機構を備える。
(もっと読む)
ワーク保持装置
【課題】測定や加工等を行う装置に対し、ワークの受け渡しを容易に行なえるようにしたワーク保持装置を提供する。
【解決手段】円柱型のワークWの両端面を挟持し保持するワーク保持装置1であって、ワークWの両端面を挟持する一対のチャック部5,5を備える。一対のチャック部5,5の各々に対し、ワークWの端面の内側面ではなく該内側面の外側に位置する外側面のみを挟持できるようにコ字型部18を形成し、一対のチャック部5,5のコ字型部18でワークWの端面の外側面を挟持できるようにする。ワーク保持装置1からワーク測定装置19にワークWを受け渡す際、ワーク測定装置19のワーククランプ軸21,21でワークWの端面の外側面でなく内側面を挟持させ、ワーク保持装置1からワーク測定装置19へワークWを容易に受け渡すことが可能となる。
(もっと読む)
表面処理における基板移送装置及び方法
【課題】表面処理用の移送装置にて被処理基板の両端部をチャックして、前記被処理基板を処理部に入れたり処理部から出したりする際、被処理基板が撓んだ状態になるのを防止する。
【解決手段】基板移送装置3のフレーム22の第1方向に離間して設けられた一対のチャック部30,30にて、被処理基板9の第1方向の両端部をそれぞれチャックする。このチャック状態で、張り付与手段27によって、少なくとも一方のチャック部30を他方のチャック部とは反対側に付勢する。そのうえでフレーム22を処理部1に出し入れする。
(もっと読む)
部品搬送装置
【課題】トレイに載置された電子部品の載置状態の検出を、迅速かつ適切に行うことのできる部品搬送装置を提供する。
【解決手段】トレイ検査装置は、トレイ18に載置されたICチップの載置状態を検査する。トレイ検査装置は、トレイ18を待機させる待機位置P1及びトレイ18との間でICチップの給排を行う作業位置P2の間でトレイ18を往復移動させるトレイ搬送装置C1〜C6と、トレイ搬送装置C1〜C6によるトレイ18の搬送路に設けられるとともに、トレイ18の幅に対応する検出範囲を有してICチップの載置状態を非接触にて検出するラインセンサー46と、ラインセンサー46による検出情報に基づいてICチップの載置状態の適否を判定するトレイ状態判定部とを備える。
(もっと読む)
把持装置及びワーク搬送装置
【課題】重ねられ通気性を有する板状ワークであっても確実に把持し得る把持装置及びワーク搬送装置の提供。
【解決手段】板状ワークの一方の面側に対向可能な対向面11及び該対向面11に対し該対向面11の面直方向に突出すると共に該対向面11に沿う所定方向に近接離間可能な一対の爪部12を備える把持部10と、板状ワークの一方の面側に対向面11が当接したか否かを検出する第1検出部20と、を有し、第1検出部20は、板状ワークの一方の面側に当接可能な大きさの板面21aを備えて、該板面21aが、対向面11と同一面上に位置する第1の位置と、対向面11から面直方向に突出した第2の位置と、の間において移動可能な板状部材21を有する把持装置1を採用する。
(もっと読む)
物品の装備用機械
【課題】高い柔軟性と良好な近接性とを有する、物品の装備用の簡単かつコスト的に有利な機械を提供する。
【解決手段】少なくとも1つの回転体1と、回転体の周縁に配置された、物品40の装備用の少なくとも1つの独立したラベル貼付装置30と、物品40の位置正確な供給および搬出用の同期駆動可能な搬送要素3、4、5、6とを備える、容器などの物品40の装備用機械である。回転体1の周縁には、回転体1用の少なくともラベル貼付装置30の相対位置を決定するための要素21、22、23が存在する。
(もっと読む)
梱包装置および商品の梱包方法
【課題】初期製品容器内に製品を収納する処理装置の排出部に連結されることが可能な梱包装置を提供する。
【解決手段】梱包装置(10)は、各々がカートン内に製品(A)を梱包することが可能な2つ以上の梱包サブシステムを具備し、梱包サブシステムは梱包される製品(11)の共通の出所を共有し、少なくとも1つの移送機構(22)が、前記共通の出所から2つ以上の前記梱包サブシステムのいずれかに製品(A)を移送するために設けられている。
(もっと読む)
ナット供給装置
【課題】スポット溶接機等の位置決めピンにナットを正確かつ確実に供給することで溶接不良を抑制し、作業効率を大幅に向上させる。
【解決手段】ナット供給装置10は、位置決めピンPに向けてシリンダ31が設置され、シリンダ31内に往復移動によってナットNを位置決めピンPに供給するピストンロッド32が設けられる。ピストンロッド32の往復通路には、バネ部材35に付勢されて待機スペースRにナットNを保持するガイド扉34が設けられる。ピストンロッド32が前進して待機スペースRのナットNを係止すると、扉開放機構36によりガイド扉34が瞬時に自動開放する。制御タイマ65は、ピストンロッド32がスタート位置から前進してナット係止位置に達する前の所定のタイミングで、ピストンロッド32を駆動するフットスイッチFを強制的にON状態に保持し、ピストンロッド32を目的位置まで到達させる。
(もっと読む)
ドラム缶のハンドリング装置
【課題】倉庫などに収納するドラム缶の数を多くすることができ、衝撃なくドラム缶を壁面に近接して設置できると共に、壁面に近接して設置されたドラム缶を容易に取り出すことができるようにする。
【解決手段】ドラム缶10を挟持及び解放する一対のクランプ部2と、各クランプ部2を互いに近接及び離反するスライド部とを備え、クランプ部2は、ドラム缶10の長手方向の両端面部10cを挟持し、ドラム缶の両端面部10cに当接する自由回転可能な複数のフリーベアリング3を備え、クランプ部2の周囲が、ドラム缶の両端面部10cから突出した鍔部10aに係止して、ドラム缶10を持ち上げ可能とする。
(もっと読む)
トレイ自動搬送システム及び移載装置
【課題】工業用酵素を生産するためのトレイをカセットに自動で積み込み/積み下ろしができかつ工業用酵素を生産する上での衛生面及び培養中の環境管理面に優れるトレイ自動搬送システム及び移載装置を提供することを課題とする。
【解決手段】工業用酵素を生産するためのトレイを自動で搬送するトレイ自動搬送システムであって、複数のトレイTを積載するカセットCは、上下方向に延びる四本の支柱と、対向する支柱間に上下方向に複数設けられた横材を有し、複数のトレイTをカセットCに積み込む移載装置2は、積み込み時にトレイTがカセットCの対向する位置に設けられた二本の横材に載置される前にトレイTが二本の横材間を移動するときにトレイTを支持部26aで支持する支持機構26を有することを特徴とし、複数のトレイTをカセットCから積み下ろす移載装置も同様の支持機構を有する。
(もっと読む)
搬送装置
【課題】予め決定された軌道に沿って移動する移動部を有する搬送装置において、残留振動を抑制し、移動に要する時間を最小化することのできる搬送装置を提供する。
【解決手段】移動部2を駆動するための駆動部31とワークを載置できる負荷部32、移動部の加速時、定速時および減速時の各軌道情報を生成する軌道情報生成部5と、軌道情報生成部により生成される軌道情報に基づいて駆動部を作動させるコントローラ4とを備える。軌道情報生成部は、駆動部のエネルギ変換効率に関する効率情報記憶手段、移動部の移動に関する特有情報記憶手段、移動部の移動条件情報記憶手段、移動部の運動特性情報記憶手段、前記運動特性に基づき移動部の残留振動を抑制し、移動部の移動に要する時間を算出する演算手段と、前記演算手段により算出された移動に要する時間をパラメータに含む評価関数の値が最小となる軌道情報を決定する軌道情報決定手段とを備える。
(もっと読む)
搬送装置、チャック並びに搬送方法
【課題】整列配置の精度が高い、搬送装置、搬送装置に用いられるチャック、並びに搬送方法を提供する。
【解決手段】搬送装置1は、整列搬送機1Aと、チャック1Bとを備える。チャック1Bは、整列搬送機1Aから搬出される処理済みのタコ25が載せられるベルトコンベア19の上方に位置する。長手方向スライド部材29に沿ってスライド可能な横方向スライド部材30が、長手方向スライド部材29に取付けられており、横方向スライド部材30にチャック1Bが取付けられている。長手方向スライド部材29や横方向スライド部材30によってチャック1Bが、撮影画像で把握されたタコ25の位置に移動する。チャック1Bは、閉じた場合に先端がチャック1Bの中心軸線上に位置するよう湾曲した3本の把持爪31を有しており、タコ25の位置に移動してきたチャック1Bは、この把持爪31を閉じてタコ25を把持する。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
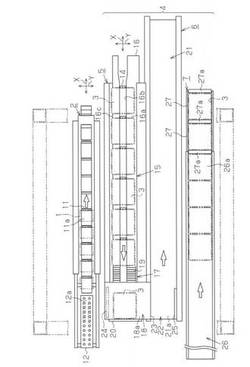
電界放出ディスプレイ用のスペーサ自動実装システム及びスペーサ自動実装方法
【課題】アスペクト比が大きく且つ多数のスペーサを高速で実装することができる電界放出ディスプレイ用のスペーサ自動実装システムを提供する。
【解決手段】複数個のスペーサを水平整列パレット21に水平方向に整列する水平整列機と、複数個のスペーサを垂直整列パレット50に垂直に整列する反転機を含む垂直整列機5と、垂直整列パレット50と接着剤の塗布されたパネル9とが固定される実装ベースと、垂直整列パレット50に複数個のスペーサを真空吸着する真空吸着機70と、複数個のスペーサをパネル9にガイドするガイド兼加圧機80と、真空吸着機を垂直整列パレット50でパネル9の上側に移動させる第1ローダ91と、ガイド兼加圧機80をパネル9の上側に移動させる第2ローダ92と、垂直整列機5、真空吸着機70、ガイド兼加圧機80、第1ローダ91及び第2ローダ92を制御してパネル9に複数個のスペーサを実装する制御機とを含む。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
1 - 20 / 161
[ Back to top ]