
逆走報知装置、逆走報知方法及びプログラム
【課題】逆走する前に逆走のおそれがある旨を報知する。
【解決手段】制御部109は、GPS受信機101から取得した自装置の位置情報によって特定される位置に対応する道路種別及びリンク種別を地図DB108aから取得する。制御部109は、自装置の位置に対応する道路種別及びリンク種別が所定の組み合わせに変化した場合、自装置の位置情報を位置情報記憶部108bに記憶する。そして、制御部109は、位置情報記憶部108bに記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動した場合、表示部106、音声出力部107によって逆走のおそれがある旨を報知する。
【解決手段】制御部109は、GPS受信機101から取得した自装置の位置情報によって特定される位置に対応する道路種別及びリンク種別を地図DB108aから取得する。制御部109は、自装置の位置に対応する道路種別及びリンク種別が所定の組み合わせに変化した場合、自装置の位置情報を位置情報記憶部108bに記憶する。そして、制御部109は、位置情報記憶部108bに記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動した場合、表示部106、音声出力部107によって逆走のおそれがある旨を報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、逆走報知装置、逆走報知方法及びプログラムに関する。
【背景技術】
【0002】
高速自動車道から誘導路(退出路)を経由してSA(サービスエリア)、PA(パーキングエリア)等に立ち寄った後、同じ退出路を逆走する事故がしばしば発生する。SA、PA内で駐車場所を探しながら走行することにより、方向感覚がなくなり、退出路を、本線への進入路と誤認することが原因の1つであると考えられる。
【0003】
このような事故を防止するため、自動車の逆走を検知して報知する技術が提案されている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−168548号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されている技術は、自動車の逆走を検知し、逆走している旨をユーザに報知する技術であり、報知時点では、逆走が起こってしまっている。
このため、逆走が発生する前に、逆走のおそれがある旨を報知することが望まれる。
【0006】
本発明は、上記実情に鑑みてなされたものであり、逆走する前に逆走のおそれがある旨を報知することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の第1の観点に係る逆走報知装置は、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別部と、
前記一方通行退出判別部によって自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶部と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別部と、
前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知部と、を備える、
ことを特徴とする。
【0008】
例えば、前記逆走報知装置は、
自装置の現在位置を判別する現在位置判別部を更に備え、
前記一方通行退出判別部は、
道路の情報と道路の属性情報とを記憶する道路情報記憶部と、
前記現在位置判別部が判別した現在位置から道路を特定し、該道路の属性情報に基づいて、一方通行を退出したことを判別する退出判別部と、を更に備える。
【0009】
例えば、前記位置判別部は、自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったか否かを判別し、
前記報知部は、前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったと判別された場合、逆走のおそれがある旨を報知する。
【0010】
例えば、前記報知部は、自装置が前記記憶部に記憶された位置情報が示す位置と自装置の現在位置との距離が小さくなるに従って、警報のレベルを高める。
【0011】
例えば、前記逆走報知装置は、
自装置が一方通行以外の道路から一方通行の道路に移動したか否かを判別する一方通行進入判別部と、
前記一方通行進入判別部によって自装置が一方通行以外の道路から一方通行の道路に移動したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える。
【0012】
例えば、前記逆走報知装置は、
自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたか否かを判別する距離判別部と、
前記距離判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える。
【0013】
例えば、前記逆走報知装置は、
前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したか否かを判別する期間経過判別部と、
前記期間経過判別部によって前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える。
【0014】
例えば、前記報知部は、音声、画面のうち、少なくとも1つを用いて逆走のおそれがある旨を報知する。
【0015】
上記目的を達成するため、本発明の第2の観点に係る逆走報知方法は、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別ステップと、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知ステップと、を備える、
ことを特徴とする。
【0016】
上記目的を達成するため、本発明の第3の観点に係るプログラムは、
コンピュータに、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別手順と、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知手順と、を実行させる、
ことを特徴とする。
【発明の効果】
【0017】
本発明によれば、逆走する前に逆走のおそれがある旨を報知することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】道路種別コードを説明するための図である。
【図3】リンク種別コードを説明するための図である。
【図4】誘導路における道路種別及びリンク種別を説明するための図である。
【図5】(a)及び(b)は、距離L1及び距離L2を説明するための図である。
【図6】ナビゲーション装置が実行する位置情報の記憶処理を説明するためのフローチャートである。
【図7】ナビゲーション装置が実行する逆走報知処理を説明するためのフローチャートである。
【図8】ナビゲーション装置が実行する位置情報の削除処理を説明するためのフローチャートである。
【図9】道路種別変更地点と自車の位置との関係を説明するための図である。
【図10】逆走のおそれがある旨を報知する画面の一例を説明するための図である。
【図11】車両の軌跡の一例を説明するための図である。
【図12】境界ラインを説明するための図である。
【図13】実施形態2に係るナビゲーション装置が実行する逆走報知処理を説明するためのフローチャートである。
【図14】車両が退出路を経由して一般道へ移動する軌跡の一例を説明するための図である。
【発明を実施するための形態】
【0019】
(実施形態1)
本発明の実施形態に係る逆走報知装置を備えるナビゲーション装置10を、以下図面を参照して説明する。
【0020】
ナビゲーション装置10は、自装置の位置(=ナビゲーション装置を搭載している自動車(以下、自車という。)の位置)を表示する装置である。
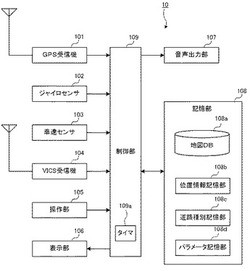
ナビゲーション装置10は、図1に示すように、GPS(Global Positioning System)受信機101と、ジャイロセンサ102と、車速センサ103と、VICS(Vehicle Information and Communication System)受信機104、操作部105と、表示部106と、音声出力部107と、記憶部108と、制御部109と、を備える。
【0021】
GPS受信機101は、GPSアンテナで受信した少なくとも3つのGPS衛星からの電波に基づいて、各GPS衛星からの距離を算出することにより、自車の位置を示す位置情報を生成する。そして、GPS受信機101は、生成した位置情報を制御部109に供給する。
【0022】
ジャイロセンサ102は、振動型ジャイロ等から構成される。ジャイロセンサ102は、自車の方向を検知し、検知した自車の方向を示す方向情報を制御部109に供給する。
【0023】
車速センサ103は、自車のECU(Electronic Control Unit)から供給された車速パルスに基づいて車速を算出し、算出した車速を示す車速情報を制御部109に供給する。
【0024】
VICS受信機104は、FM(Frequency Modulation)アンテナ等で受信した電波に含まれる渋滞情報を制御部109に供給する。ここで、渋滞情報は、どの道路の区間で渋滞が発生しているかを特定する情報である。
【0025】
操作部105は、タッチパネル、カーソルキー等から構成され、ユーザからの操作指示に応じた信号を制御部109に供給する。
【0026】
表示部106は、液晶ディスプレイ装置等から構成され、制御部109の制御に従って、画像を表示する。
【0027】
音声出力部107は、D/A(デジタル/アナログ)変換器、アンプ、スピーカ等から構成され、制御部109から供給されたデジタル信号をアナログ信号に変換して増幅し、スピーカから音声として出力する。
【0028】
記憶部108は、磁気ディスク等から構成され、地図DB(データベース)108a、位置情報記憶部108b、道路種別記憶部108c、パラメータ記憶部108d等を備えている。
【0029】
地図DB108aは、地図の画像の情報(画像情報)と地図上の道路の属性を示す属性情報とを記憶する。本実施形態では、属性情報として、交差点や分岐点等の接続ノードに関するノード情報、ノード間を結ぶリンク(道路)に関するリンク情報等を記憶する。
【0030】
ノード情報は、ノードを識別するノード識別情報、ノードの位置情報、接続するリンクの数を示すリンク数情報、ノードの名称を示す名称等の情報を含む。また、リンク情報は、リンクの起点となるノードのノード識別情報、リンクの終点となるノードのノード識別情報、リンクに相当する道路の道路種別コード、リンク種別コード等を含む。
【0031】
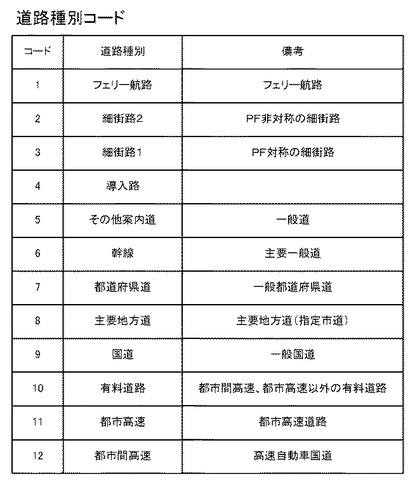
道路種別コードは、図2に示すように、都市高速道路、高速自動車国道、一般国道、一般道といった道路の種類を特定するコード情報を含む。
を含む。
【0032】
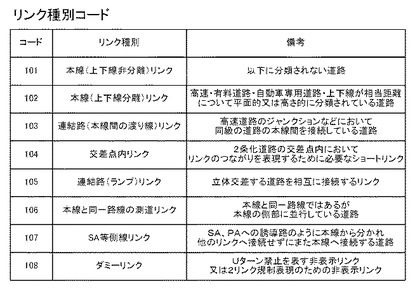
また、リンク種別コードは、リンクの種別を特定する識別情報であって、図3に示すように、本線(上下線非分離)リンク、本線(上下線分離)リンク、連結路(本線間の渡り線)リンク、交差点内リンク、連結路(ランプ)リンク、本線と同一路線の測道リンク、SA(サービスエリア)やPA(パーキングエリア)等と高速自動車道の本線とを繋ぐリンクを示すSA等側線リンク等を示すコードを含む。
【0033】
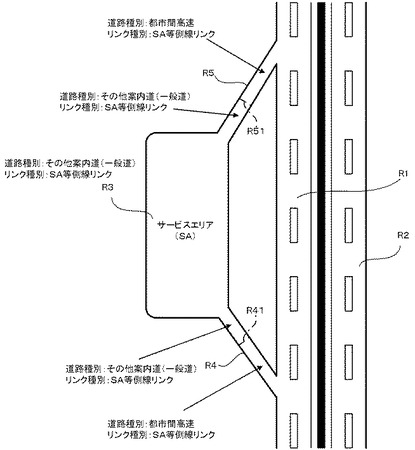
道路種別コードとリンク種別コードを具体例を参照して説明する。図4は、高速自動車道の本線R1、R2とサービスエリアR3と、本線R1からサービスエリアR3に続く退出路R4と、サービスエリアR3から本線R1に続く進入路R5と、を示す。
【0034】
図4において、高速自動車道の本線R1とR2には、それぞれ、道路種別として「都市間高速」又は「都市高速」、リンク種別として「本線」が設定され、サービスエリアSAには、道路種別として「その他案内道」、リンク種別として「SA等側線リンク」が設定される。
【0035】
また、本線R1からサービスエリアR3に続く退出路R4に関しては、退出路R4のほぼ中央部に仮想的に設定された境界ラインR41を境界に高速自動車道側には、道路種別として「都市間高速」又は「都市高速」が設定され、リンク種別としては「SA等側線リンク」が設定され、境界ラインR41を境界にサービスエリアR3側には、道路種別として「その他案内道」が設定され、リンク種別として「SA等側線リンク」が設定される。
【0036】
また、サービスエリアR3から高速自動車道の本線R1に続く進入路R5に関しては、進入路R5のほぼ中央部に仮想的に設定された境界ラインR51を境界に高速自動車道側には、道路種別として「都市間高速」又は「都市高速」が設定され、リンク種別としては「SA等側線リンク」が設定され、境界ラインR41を境界にサービスエリアR3側には、道路種別として「その他案内道」が設定され、リンク種別として「SA等側線リンク」が設定される。
【0037】
従って、自車の現在の位置に対応する道路種別が、例えば、「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合、一方通行の道路(逆走が許されない高速自動車道)から一方通行以外の道路(図4では、サービスエリアR3)へ移動したとみなすことができる。一方、自車の現在の位置に対応する道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合、一方通行以外の道路(即ち、SA)から一方通行の道路(逆走が許されない高速自動車道)へ移動したとみなすことができる。
【0038】
図1に示す記憶部108の位置情報記憶部108bは、自車の現在の位置情報を記憶する。
道路種別記憶部108cは、自車の現在の位置に対応する道路種別及びリンク種別を記憶する。
【0039】
また、記憶部108のパラメータ記憶部108dは、種々の動作パラメータを記憶する。本実施形態では、特に、高速自動車道の本線からサービスエリア(SA)或いはパーキングエリア(PA)に続く退出路毎に、距離のパラメータ(閾値)L1とL2を記憶する。閾値L2は、各退出路に設定された境界ラインからサービスエリア(SA)又はパーキングエリア(PA)に至るまでの距離+第1の所定量(例えば20m)程度、閾値L1は、距離L2+第2の所定量(例えば、20m)程度に設定されている。閾値L1とL2は、図5(a)に示すように、退出路毎に、境界ラインの位置(緯度X、経度Y)に対応付けて、パラメータ記憶部108dに予め格納されている。
【0040】
図4の例で具体的に説明すると、図5(b)に示すように、退出路R4の境界ラインR41の位置を基準に距離L1とL2が設定されている。閾値L2は、境界ラインR41からサービスエリアR3に至るまでの距離+20mにほぼ等しく、閾値L1は、閾値L2+所定量(例えば、20m)程度に設定されている。このように閾値L1とL2を設定することにより、車両と境界ラインR41との距離が閾値L2より大きくなったときに、車両がサービスエリアR3に入ったこと、車両と境界ラインR41との距離が閾値L1より大きくなったときに、車両がサービスエリアR3内を走行して、退出路R4からある程度離れたことを判別することが可能となる。
【0041】
制御部109は、メモリ内蔵型のワンチッププロセッサ等から構成され、内蔵メモリに記憶されたプログラムに従って、ナビゲーション装置10の各部を制御する。また、制御部109は、タイマ109aとしても機能する。そして、制御部109は、GPS受信機101から供給された位置情報から特定される位置に対応する道路種別及びリンク種別を地図DB108aから取得し、自車の現在の位置と道路の道路種別及びリンク種別の組み合わせが変化した地点との距離に基づいて、逆走のおそれがある旨を報知する。
【0042】
次に、本実施形態のナビゲーション装置10の動作を説明する。
ナビゲーション装置10は、一般的なナビゲーション装置と同様に、GPS受信機101から取得した自車の位置情報、ジャイロセンサ102から取得した自車の方向情報、車速センサ103から取得した自車の車速情報、地図DB108aから取得した地図の画像情報に基づいて、自車の位置を示す地図を表示部106に表示する。ユーザは、表示部106に表示された地図を参照しながら自車を運転する。
【0043】
ナビゲーション装置10は、上述の一般的なナビゲーション動作と並行して、本実施形態に特有の逆走報知(警告)処理を行う。
以下、理解を容易にするため、車両が、図4に示す高速自動車道の本線R1から誘導路R4を通って、サービスエリアR3に入り、その後、本線R1に戻る場合を例にして、ナビゲーション装置10が実行する逆走報知処理について説明する。
【0044】
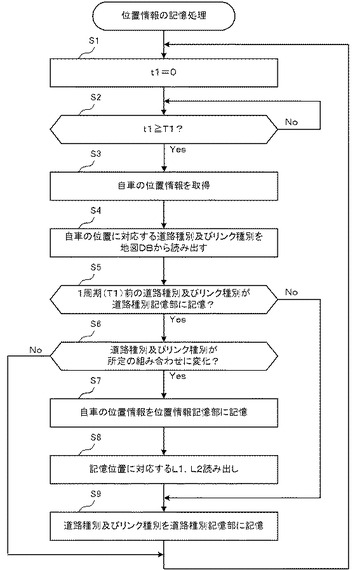
(1)位置情報の記憶処理
制御部109は、電源投入後、図6に示す位置情報の記憶処理を開始し、まず、タイマ109aのカウンタ値t1を0にリセットして、計時を開始させる(ステップS1)。制御部109は、タイマ109aのカウンタ値t1が所定の時間T1以上であるか否かを判別する(ステップS2)。この時間T1は、制御部109が、GPS受信機101から自車の位置情報を取得する周期に相当する。
【0045】
制御部109は、カウンタ値t1が所定の時間T1未満であると判別した場合(ステップS2;No)、ステップS2を繰り返す。
一方、制御部109は、カウンタ値t1が所定の時間T1以上であると判別した場合(ステップS2;Yes)、GPS受信機101から自車の位置情報を取得する(ステップS3)。制御部109は、取得した自車の位置情報によって特定される位置に対応する道路種別及びリンク種別を地図DB108aから読み出す(ステップS4)。
制御部109は、1周期T1前の道路種別及びリンク種別と現在の道路種別及びリンク種別を比較するため、道路種別記憶部108cに1周期T1前の道路種別及びリンク種別が記憶されているか否かを判別する(ステップS5)。
【0046】
制御部109は、道路種別記憶部108cに1周期T1前の道路種別及びリンク種別が記憶されていないと判別した場合(ステップS5;No)、ステップS9に処理を進め、ステップS4で読み出した道路種別及びリンク種別を道路種別記憶部108cに記憶する(ステップS9)。
【0047】
一方、制御部109は、道路種別記憶部108cに1周期T1前の道路種別及びリンク種別が記憶されていると判別した場合(ステップS5;Yes)、自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別部として、道路種別記憶部108cに記憶されている1周期T1前の道路種別及びリンク種別と、ステップS4で読み出した道路種別及びリンク種別とを比較し、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせに変化したか否かを判別する(ステップS6)。即ち、制御部109は、自車が、退出路を通って、一方通行の道路(高速自動車道)から一方通行以外の道路(SA)へ移動したとみなされるか否かを判別する。
【0048】
制御部109は、道路種別とリンク種別の組み合わせに変化が無いか、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせ以外の組み合わせに変化したと判別した場合、即ち、自車が一方通行の道路(高速自動車道)から一方通行以外の道路(SA)へ移動したとみなされないと判別した場合(ステップS6;No)、ステップS1に処理を戻す。
【0049】
一方、制御部109は、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせに変化したと判別した場合、即ち、自車が一方通行の道路(高速自動車道)から一方通行以外の道路(サービスエリアSA)へ移動したとみなされると判別した場合(ステップS6;Yes)、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶部として、ステップS3で取得した自車の位置情報(以下、道路種別変更地点の位置情報という。)を位置情報記憶部108bに記憶する(ステップS7)。
さらに、制御部109は、パラメータ記憶部108dから、ステップS3で取得した位置に対応付けられている距離L1とL2を読み出す(ステップS8)。この位置は、図4に示す境界ラインR41の位置に相当する。
【0050】
また、制御部109は、ステップS4で読み出した道路種別及びリンク種別を道路種別記憶部108cに記憶する(ステップS9)。
【0051】
その後、制御は、ステップS1に戻り、制御部109は同様の処理を繰り返す。
これにより、自車が一方通行の道路(例えば、高速自動車道)から一方通行以外の道路(例えば、SA、PAや一般道)へ移動した場合、道路種別変更地点の位置情報が位置情報記憶部108bに記憶され、道路種別及びリンク種別が道路種別記憶部108cに記憶される。
【0052】
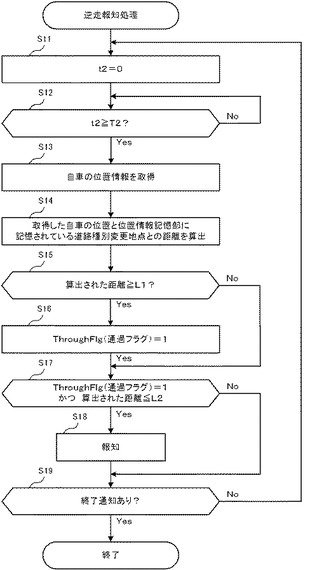
(2)逆走報知処理
制御部109は、図6に示す位置情報の記憶処理において、道路種別変更地点の位置情報を位置情報記憶部108bに記憶したことを契機として、図7に示す逆走報知処理を開始し、まず、タイマ109aのカウンタ値t2を0にリセットして、計時を開始させる(ステップS11)。制御部109は、タイマ109aのカウンタ値t2が所定の時間T2以上であるか否かを判別する(ステップS12)。時間T2は、制御部109が、GPS受信機101から自車の位置情報を取得する周期に相当する。
【0053】
制御部109は、カウンタ値t2が所定の時間T2未満であると判別した場合(ステップS12;No)、ステップS12を繰り返す。
一方、制御部109は、カウンタ値t2が所定の時間T2以上であると判別した場合(ステップS12;Yes)、GPS受信機101から自車の位置情報を取得する(ステップS13)。制御部109は、取得した自車の位置情報によって特定される位置と位置情報記憶部108bに記憶されている道路種別変更地点の位置情報によって特定される位置との距離を算出する(ステップS14)。制御部109は、算出された距離がステップS8で読み出した所定の閾値L1以上であるか否かを判別する(ステップS15)。
【0054】
制御部109は、算出された距離が所定の閾値L1未満であると判別した場合(ステップS15;No)、後述するステップS17に処理を進める。
一方、制御部109は、算出された距離が所定の閾値L1以上であると判別した場合(ステップS15;Yes)、ThroughFlg(通過フラグ)の値を1に設定する(ステップS16)。
ここで、ThroughFlg(通過フラグ)=1は、道路種別変更地点から所定の閾値L1以上離れたことがあることを示し、ThroughFlg(通過フラグ)=0は、道路種別変更地点から所定の閾値L1以上離れたことがないことを示す。
【0055】
続いて、制御部109は、記憶されている位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したか否かを判別する位置判別部として、ThroughFlg(通過フラグ)=1であり、かつ、ステップS14で算出された距離が閾値L2以下であるか否かを判別する(ステップS17)。即ち、自車が、図9に示すように、道路種別変更地点(境界ライン)R41を中心とする半径L2の円内に入っているか否かを判別する。
【0056】
制御部109は、ThroughFlg(通過フラグ)=1であり、かつ、ステップS14で算出された距離が所定の閾値L2以下であると判別した場合(ステップS17;Yes)、逆走のおそれがある旨を報知する報知部として、図10に示すように、退出路の出口の近傍におり逆走するおそれがある旨を地図画像及びメッセージで表示部106に表示し、音声出力部107からその旨を音声で出力することにより、報知する(ステップS18)。その後、処理はステップS19に進む。
一方、制御部109は、ThroughFlg(通過フラグ)=1であり、かつ、ステップS14で算出された距離が所定の距離L2以下である、という条件を満たさないと判別した場合(ステップS17;No)、ステップS18をスキップして、ステップS19に進む。
【0057】
ステップS19において、制御部109は、逆走報知処理のプロセスを終了する旨の通知(以下、終了通知という。)を受けたか否かを判別する。制御部109は、終了通知を受けたと判別した場合(ステップS19;Yes)、逆走報知処理を終了する。一方、制御部109は、終了通知を受けていないと判別した場合(ステップS19;No)、ステップS11に処理を戻し、同様の処理を繰り返す。
【0058】
これにより、自車が道路種別変更地点から閾値L1以上一旦離れ、その後閾値L2以下の範囲に戻って来た場合に、制御部109は、音声又は表示により、退出路の出口の近くに位置しており逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0059】
(3)位置情報の削除処理
制御部109は、図6に示す位置情報の記憶処理において、道路種別変更地点の位置情報を位置情報記憶部108bに記憶したことを契機として、図8に示す位置情報の削除処理を開始し、まず、タイマ109aのカウンタ値t3を0にリセットして、計時を開始させる(ステップS31)。制御部109は、タイマ109aのカウンタ値t3が所定の時間T3以上であるか否かを判別する(ステップS32)。この時間(T3)は、制御部109が、GPS受信機101から自車の位置情報を取得する周期に相当する。
【0060】
制御部109は、カウンタ値t3が所定の時間T3未満であると判別した場合(ステップS32;No)、ステップS32を繰り返す。
一方、制御部109は、カウンタ値t3が所定の時間T3以上であると判別した場合(ステップS32;Yes)、GPS受信機101から自車の位置情報を取得する(ステップS33)。制御部109は、取得した自車の位置情報によって特定される位置に対応する道路種別及びリンク種別を地図DB108aから読み出す(ステップS34)。制御部109は、自装置が一方通行以外の道路から一方通行の道路に移動したか否かを判別する一方通行進入判別部として、道路種別記憶部108cに記憶されている道路種別及びリンク種別と、ステップS34で読み出した道路種別及びリンク種別とを比較し、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせに変化したか否かを判別する(ステップS35)。即ち、制御部109は、自車が一方通行以外の道路(SA)から一方通行の道路(高速自動車道)に移動したとみなされるか否かを判別する。
【0061】
制御部109は、自車が一方通行以外の道路(SA)から一方通行の道路(高速自動車道)に移動したとみなされないと判別した場合(ステップS35;No)、ステップS31に処理を戻す。
一方、制御部109は、自車が一方通行以外の道路(SA)から一方通行の道路(高速自動車道)に移動したとみなされると判別した場合(ステップS35;Yes)、逆走報知処理のプロセスにこのプロセスを終了する旨の通知(終了通知)をする(ステップS36)。制御部109は、ThroughFlg(通過フラグ)の値を、道路種別変更地点から所定の距離L2以上離れたことがないことを示す0に設定する(ステップS37)。また、制御部109は、位置情報削除部として、位置情報記憶部108bから道路種別変更地点の位置情報を削除する(ステップS38)。
これにより、次に実行される逆走報知処理で使用される通過フラグや位置情報記憶部108bを初期化する。
【0062】
以上の動作を図6乃至9を参照して具体的に説明する。
例えば、図9の軌跡Q1に示すように、車両が移動したとする。この場合、まず、制御部109は、車両が退出路R4の境界ラインR41を越えた時点で、一方通行の道路(高速自動車道)から一方通行以外の道路(SA)への変化を検出する(ステップS6)。そして、車両が退出路を出て一定距離走行した時点で、距離≧閾値L1となって、ThroughFlg=1となる(ステップS16)。ただし、この段階では警報は行わない。その後、距離≦閾値L2の領域に入ると、ステップ17でYesとなって、警報が発せられる(ステップS18)。これにより、ドライバは、逆走のおそれがあることに気が付いて、逆走を回避する。
【0063】
一方、図11の軌跡Q2に示すように、車両が移動したとする。この場合、車両が退出路を出て、一定距離走行した時点で、距離≧閾値L1となって、ThroughFlg=1となる(ステップS16)。その後、車両が進入路R5を走行する間に、境界ラインR51を通過した時点で、制御部109は、一方通行以外の道路(SA)から一方通行の道路(高速自動車道)への変化を検出する(ステップ35)。そして、制御部109は、ThroughFlgと道路種別変更地点の位置情報をリセットし(ステップS37,S38)、次の処理に備える。
【0064】
以上、説明したように、本実施形態によれば、自車が道路種別変更地点から所定の閾値L1以上一旦離れた後、閾値L2以下の範囲に入った場合、制御部109は、音声又は画面により、退出路の出口の近傍に位置しており逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0065】
(変形例)
上記実施形態においては、車両が退出路からサービスエリアに入った後でも、道路種別変更地点から閾値L1以上一旦離れてから、閾値L2以下の範囲に入った場合に警報を発する。この発明は、これに限定されず、車両が道路種別変更地点から閾値L2〜L1以下の範囲にあるときは常に警報を発するようにしてもよい。
【0066】
この場合は、例えば、図7の逆走報知処理のステップS15において、算出された距離が閾値L2より大きくなったときに、ステップS16でThroughFlgをセットするように、構成すればよい。
また、ThroughFlgを使用せず、L1>算出された距離>L2のときに警報を発するようにしてもよい。
また、警報段階を設けても良い。例えば、図7のステップS17で、ThroughFlg=1、L2<算出された距離≦L1と判別されたときは比較的穏やかな警告を行い、ステップS17で、ThroughFlg=1、算出された距離≦L2と判別されたときはけたたましい警告を行うようにしてもよい。即ち、算出された距離が小さくなるに従って、段階的に或いは連続的に警報のレベルを高くしてもよい。
また、L2=L1としてもよい。この場合は、車両が一旦退出路から一定距離L2以上離れて、再びL2以内に入った場合に、警報が発せられる。
L1とL2の設定手法は任意である。例えば、L2=境界ラインとサービスエリアやパーキングエリアの入り口までの距離、としてもよい。
【0067】
また、車両が一方通行の道路から、それ以外のエリアに移動したことを検出する手法は任意である。上記実施形態では、道路の属性情報として「道路種別」と「リンク種別」とを使って、一方通行の道路からそれ以外のエリアへの移動を検出したが、これに限定されない。例えば、一方通行の道路には、一方通行のコードを割り当て、それ以外のエリアには他のコードを割り当てて、現在位置のコードが一方通行のコードから他のコードに変化したときに、一方通行の道路からそれ以外のエリアに移動したと判別してもよい。
【0068】
また、リンク種別を使用せずに、道路種別のみに基づいて、一方通行の道路からその他へエリアへの移動を検出することも可能である。例えば、道路種別が「都市高速」や「都市間高速」から「その他案内道」に変化したときに、一方通行の道路からそれ以外のエリアに移動したと判別するようにしてもよい。
また、道路に付す属性情報のコード体系として、一般のものを例示したが、一方通行の道路からそれ以外のエリアへの移動を検出できる属性情報であれば、情報の種類や割付手法は任意である。例えば、図12に示すように、退出路R4又は進入路R5とサービスエリアSAとの境界にそれぞれ境界ラインR41、R51が設定され、退出路R4及び進入路R5の全範囲に、一方通行を示すコード「01」が設定され、サービスエリアR3の全範囲に、一方通行以外を示すコード「02」が設定されるようにしてもよい。
【0069】
(実施形態2)
実施形態1では、自車が道路種別変更地点から距離L2以内の位置にあるときに、警告を発した。しかし、この範囲にあるときでも、車両が変更地点から遠ざかりつつある場合は、逆走のおそれは無い。そこで、自車が道路種別変更地点から所定の距離範囲に位置し、しかも、車両が道路種別変更地点に近づきつつあると判別した場合のみ、逆走のおそれがある旨を報知するナビゲーション装置10の実施形態を説明する。本実施形態に係るナビゲーション装置10の構成は、実施形態1と同様である。
【0070】
この場合、制御部109は、図13に示すように、図7に示す逆走報知処理のステップS11からS14までの処理と同じ処理(以下、距離算出処理という。)を実行する(ステップS41)。制御部109は、算出された距離が所定の距離L2以下であるか否かを判別する(ステップS42)。
【0071】
制御部109は、算出された距離が所定の距離L2以下でないと判別した場合(ステップS42;No)、ステップ46に処理を進める。
【0072】
一方、制御部109は、算出された距離が所定の距離L2以下であると判別した場合(ステップS42;Yes)、位置情報記憶部108bに1周期T2前に算出された距離が記憶されているか否かを判別する(ステップS43)。ここで、制御部109は、ステップS41からステップS47までの処理を所定の周期T2で繰り返し実行するが、初めてステップS43を実行する場合、位置情報記憶部108bには1周期T2前に算出された距離は記憶されていない。一方、ステップ43を実行する回数が2回目以降の場合、位置情報記憶部108bには1周期T2前に算出された距離が記憶されている。
【0073】
制御部109は、位置情報記憶部108bに1周期T2前に算出された距離が記憶されていないと判別した場合(ステップS43;No)、ステップS46に処理を進める。
【0074】
一方、制御部109は、位置情報記憶部108bに1周期T2前に算出された距離が記憶されていると判別した場合(ステップS43;Yes)、自車の現在の位置に基づいてステップ41で算出された距離が位置情報記憶部108bに記憶されている1周期T2前にステップS41で算出された距離以下であるか否かを判別する(ステップS44)。即ち、制御部109は、自車が道路種別変更地点に近づきつつあるか否かを判別する。
【0075】
制御部109は、算出した距離が位置情報記憶部108bに記憶されている距離より大きいと判別した場合(ステップS44;No)、即ち、自車が道路種別変更地点から離れつつある場合、ステップS46に処理を進める。
【0076】
一方、制御部109は、算出した距離が位置情報記憶部108bに記憶されている距離以下であると判別した場合(ステップS44;Yes)、即ち、自車が道路種別変更地点に近づきつつある場合、逆走のおそれがある旨を表示部106に表示し、音声出力部107からその旨を音声で出力することにより、報知する(ステップS45)。
【0077】
制御部109は、ステップS41で算出された距離を位置情報記憶部108bに記憶する(ステップS46)。制御部109は、逆走報知処理のプロセスを終了する旨の通知(以下、終了通知という。)を受けたか否かを判別する(ステップS47)。
制御部109は、終了通知を受けたと判別した場合(ステップS47;Yes)、逆走報知処理を終了する。一方、制御部109は、終了通知を受けていないと判別した場合(ステップS47;No)、ステップS41に処理を戻し、同様の処理を繰り返す。
【0078】
以上の動作を図9、図11、図13を参照して具体的に説明する。
例えば、図9の軌跡Q1に示すように、車両が移動したとする。この場合、まず、車両が道路種別変更地点を通過し、距離≦L2の範囲を走行する場合、ステップS42でYesであるが、道路種別変更地点から遠ざかっているため、ステップ44でNoとなり、警告は発せられない。しかし、その後、再び、距離≦L2の領域に入ると、ステップS42でYesとなり、道路種別変更地点に近づくため、ステップ44でYesとなって、警告が発せられる。
【0079】
一方、図11の軌跡Q2に示すように、車両が移動したとする。この場合、車両が道路種別変更地点を通過し、距離≦L2の範囲を走行する場合、ステップS42でYesであるが、道路種別変更地点から遠ざかっているため、ステップ44でNoとなり、警告は発せられない。その後、距離>L2であり、ステップS42でNoとなって、警告は発せられない。
【0080】
これにより、自車が道路種別変更地点から所定の距離L2以内の範囲に移動し、かつ、自車の位置と道路種別変更地点との距離が時間の経過に伴って小さくなった場合、即ち、自車が高速自動車道の退出路の近傍に近づきつつある場合、制御部109は、音声又は画面により逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0081】
以上、説明したように、本実施形態によれば、制御部109は、自車が高速自動車道の退出路の近傍に近づいている場合、制御部109は、音声又は画面により逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0082】
この発明は上記の実施形態に限定されず、種々の変形及び応用が可能である。例えば、上記説明において、示したハードウェアの構成及び動作のフローチャートは一例でありこれらに限定されるものではなく、適宜変更及び応用が可能である。
【0083】
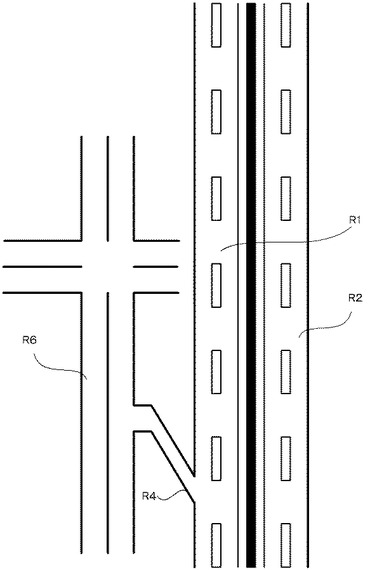
上記実施形態では、理解を容易にするため、高速自動車道から退出路を通って、SA(又はPA)に入り、その後、この退出路に戻る場合を例にして、ナビゲーション装置10の動作を説明したが、図14に示すように、高速自動車道の本線R1から退出路R4を経由して高速自動車道以外の道路R6(国道、一般道等)に退出した後、この誘導路に戻った場合にも拡張することができる。
この場合、制御部109は、道路種別が「都市間高速」又は「都市高速」からその他の道路種別に変化した場合、自車の現在の位置情報を位置情報記憶部108bに記憶すればよい。
【0084】
上記実施形態では、位置情報の削除処理において、道路種別及びリンク種別の組み合わせの変更に基づいて、道路種別変更地点の位置情報を削除しているが、以下のようにしてもよい。
制御部109は、自車の位置と道路種別変更地点との距離が所定の距離以上となった場合、道路種別変更地点の位置情報を削除してもよい。
また、制御部109は、道路種別変更地点の位置情報を位置情報記憶部108bに記憶してから所定の時間が経過した場合、道路種別変更地点の位置情報を削除してもよい。
【0085】
上記実施形態では、理解を容易にするため、経路案内をしていない場合を例にしてナビゲーション装置10の動作を説明したが、経路案内をしている場合であっても、同様に動作する。
上記実施形態では、本発明に係る逆走報知装置は、ナビゲーション装置10に組み込まれているが、ノートPC(Personal Computer)、携帯電話等に組み込まれていてもよい。
上記実施形態では、音声及び画面(所定のメッセージ、マークを含む)により報知をしているが、LED(Light Emitting Diode)等を用いたインジケータ等により報知をしてもよい。
【0086】
上記実施形態では、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合における自車の位置を道路種別変更地点としているが、道路種別が「有料道路」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合における自車の位置を道路種別変更地点としてもよい。
結局、自車の位置に対応する道路種別が、逆走が許されない道路種別から該道路種別以外の道路種別に変化した場合における自車の位置を道路種別変更地点とすればよく、上記実施形態で使用した道路種別(都市間高速、都市高速、有料道路等)に限定されない。
【0087】
なお、本発明のナビゲーション装置10は、専用の装置を用いる必要はなく、通常のコンピュータにより実現することができる。例えばコンピュータに上記した各処理を実行させるためのプログラム及びデータを記録媒体(CD−ROM等)に記録して配布し、これをインストールしてOS上で実行することにより、本発明のナビゲーション装置10を実現できる。また、プログラム及びデータの配布は、CD−ROM等に限らず、通信回線等を介して行われてもよい。
【符号の説明】
【0088】
10 ナビゲーション装置
101 GPS受信機
102 ジャイロセンサ
103 車速センサ
104 VICS受信機
105 操作部
106 表示部
107 音声出力部
108 記憶部
108a 地図データベース
108b 位置情報記憶部
108c 道路種別記憶部
108d パラメータ記憶部
109 制御部
109a タイマ
R1 本線
R2 本線
R3 サービスエリア
R4 退出路
R5 進入路
R6 高速自動車道以外の道路
R41 境界ライン
R51 境界ライン
【技術分野】
【0001】
本発明は、逆走報知装置、逆走報知方法及びプログラムに関する。
【背景技術】
【0002】
高速自動車道から誘導路(退出路)を経由してSA(サービスエリア)、PA(パーキングエリア)等に立ち寄った後、同じ退出路を逆走する事故がしばしば発生する。SA、PA内で駐車場所を探しながら走行することにより、方向感覚がなくなり、退出路を、本線への進入路と誤認することが原因の1つであると考えられる。
【0003】
このような事故を防止するため、自動車の逆走を検知して報知する技術が提案されている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−168548号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されている技術は、自動車の逆走を検知し、逆走している旨をユーザに報知する技術であり、報知時点では、逆走が起こってしまっている。
このため、逆走が発生する前に、逆走のおそれがある旨を報知することが望まれる。
【0006】
本発明は、上記実情に鑑みてなされたものであり、逆走する前に逆走のおそれがある旨を報知することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の第1の観点に係る逆走報知装置は、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別部と、
前記一方通行退出判別部によって自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶部と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別部と、
前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知部と、を備える、
ことを特徴とする。
【0008】
例えば、前記逆走報知装置は、
自装置の現在位置を判別する現在位置判別部を更に備え、
前記一方通行退出判別部は、
道路の情報と道路の属性情報とを記憶する道路情報記憶部と、
前記現在位置判別部が判別した現在位置から道路を特定し、該道路の属性情報に基づいて、一方通行を退出したことを判別する退出判別部と、を更に備える。
【0009】
例えば、前記位置判別部は、自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったか否かを判別し、
前記報知部は、前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったと判別された場合、逆走のおそれがある旨を報知する。
【0010】
例えば、前記報知部は、自装置が前記記憶部に記憶された位置情報が示す位置と自装置の現在位置との距離が小さくなるに従って、警報のレベルを高める。
【0011】
例えば、前記逆走報知装置は、
自装置が一方通行以外の道路から一方通行の道路に移動したか否かを判別する一方通行進入判別部と、
前記一方通行進入判別部によって自装置が一方通行以外の道路から一方通行の道路に移動したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える。
【0012】
例えば、前記逆走報知装置は、
自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたか否かを判別する距離判別部と、
前記距離判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える。
【0013】
例えば、前記逆走報知装置は、
前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したか否かを判別する期間経過判別部と、
前記期間経過判別部によって前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える。
【0014】
例えば、前記報知部は、音声、画面のうち、少なくとも1つを用いて逆走のおそれがある旨を報知する。
【0015】
上記目的を達成するため、本発明の第2の観点に係る逆走報知方法は、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別ステップと、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知ステップと、を備える、
ことを特徴とする。
【0016】
上記目的を達成するため、本発明の第3の観点に係るプログラムは、
コンピュータに、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別手順と、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知手順と、を実行させる、
ことを特徴とする。
【発明の効果】
【0017】
本発明によれば、逆走する前に逆走のおそれがある旨を報知することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】道路種別コードを説明するための図である。
【図3】リンク種別コードを説明するための図である。
【図4】誘導路における道路種別及びリンク種別を説明するための図である。
【図5】(a)及び(b)は、距離L1及び距離L2を説明するための図である。
【図6】ナビゲーション装置が実行する位置情報の記憶処理を説明するためのフローチャートである。
【図7】ナビゲーション装置が実行する逆走報知処理を説明するためのフローチャートである。
【図8】ナビゲーション装置が実行する位置情報の削除処理を説明するためのフローチャートである。
【図9】道路種別変更地点と自車の位置との関係を説明するための図である。
【図10】逆走のおそれがある旨を報知する画面の一例を説明するための図である。
【図11】車両の軌跡の一例を説明するための図である。
【図12】境界ラインを説明するための図である。
【図13】実施形態2に係るナビゲーション装置が実行する逆走報知処理を説明するためのフローチャートである。
【図14】車両が退出路を経由して一般道へ移動する軌跡の一例を説明するための図である。
【発明を実施するための形態】
【0019】
(実施形態1)
本発明の実施形態に係る逆走報知装置を備えるナビゲーション装置10を、以下図面を参照して説明する。
【0020】
ナビゲーション装置10は、自装置の位置(=ナビゲーション装置を搭載している自動車(以下、自車という。)の位置)を表示する装置である。
ナビゲーション装置10は、図1に示すように、GPS(Global Positioning System)受信機101と、ジャイロセンサ102と、車速センサ103と、VICS(Vehicle Information and Communication System)受信機104、操作部105と、表示部106と、音声出力部107と、記憶部108と、制御部109と、を備える。
【0021】
GPS受信機101は、GPSアンテナで受信した少なくとも3つのGPS衛星からの電波に基づいて、各GPS衛星からの距離を算出することにより、自車の位置を示す位置情報を生成する。そして、GPS受信機101は、生成した位置情報を制御部109に供給する。
【0022】
ジャイロセンサ102は、振動型ジャイロ等から構成される。ジャイロセンサ102は、自車の方向を検知し、検知した自車の方向を示す方向情報を制御部109に供給する。
【0023】
車速センサ103は、自車のECU(Electronic Control Unit)から供給された車速パルスに基づいて車速を算出し、算出した車速を示す車速情報を制御部109に供給する。
【0024】
VICS受信機104は、FM(Frequency Modulation)アンテナ等で受信した電波に含まれる渋滞情報を制御部109に供給する。ここで、渋滞情報は、どの道路の区間で渋滞が発生しているかを特定する情報である。
【0025】
操作部105は、タッチパネル、カーソルキー等から構成され、ユーザからの操作指示に応じた信号を制御部109に供給する。
【0026】
表示部106は、液晶ディスプレイ装置等から構成され、制御部109の制御に従って、画像を表示する。
【0027】
音声出力部107は、D/A(デジタル/アナログ)変換器、アンプ、スピーカ等から構成され、制御部109から供給されたデジタル信号をアナログ信号に変換して増幅し、スピーカから音声として出力する。
【0028】
記憶部108は、磁気ディスク等から構成され、地図DB(データベース)108a、位置情報記憶部108b、道路種別記憶部108c、パラメータ記憶部108d等を備えている。
【0029】
地図DB108aは、地図の画像の情報(画像情報)と地図上の道路の属性を示す属性情報とを記憶する。本実施形態では、属性情報として、交差点や分岐点等の接続ノードに関するノード情報、ノード間を結ぶリンク(道路)に関するリンク情報等を記憶する。
【0030】
ノード情報は、ノードを識別するノード識別情報、ノードの位置情報、接続するリンクの数を示すリンク数情報、ノードの名称を示す名称等の情報を含む。また、リンク情報は、リンクの起点となるノードのノード識別情報、リンクの終点となるノードのノード識別情報、リンクに相当する道路の道路種別コード、リンク種別コード等を含む。
【0031】
道路種別コードは、図2に示すように、都市高速道路、高速自動車国道、一般国道、一般道といった道路の種類を特定するコード情報を含む。
を含む。
【0032】
また、リンク種別コードは、リンクの種別を特定する識別情報であって、図3に示すように、本線(上下線非分離)リンク、本線(上下線分離)リンク、連結路(本線間の渡り線)リンク、交差点内リンク、連結路(ランプ)リンク、本線と同一路線の測道リンク、SA(サービスエリア)やPA(パーキングエリア)等と高速自動車道の本線とを繋ぐリンクを示すSA等側線リンク等を示すコードを含む。
【0033】
道路種別コードとリンク種別コードを具体例を参照して説明する。図4は、高速自動車道の本線R1、R2とサービスエリアR3と、本線R1からサービスエリアR3に続く退出路R4と、サービスエリアR3から本線R1に続く進入路R5と、を示す。
【0034】
図4において、高速自動車道の本線R1とR2には、それぞれ、道路種別として「都市間高速」又は「都市高速」、リンク種別として「本線」が設定され、サービスエリアSAには、道路種別として「その他案内道」、リンク種別として「SA等側線リンク」が設定される。
【0035】
また、本線R1からサービスエリアR3に続く退出路R4に関しては、退出路R4のほぼ中央部に仮想的に設定された境界ラインR41を境界に高速自動車道側には、道路種別として「都市間高速」又は「都市高速」が設定され、リンク種別としては「SA等側線リンク」が設定され、境界ラインR41を境界にサービスエリアR3側には、道路種別として「その他案内道」が設定され、リンク種別として「SA等側線リンク」が設定される。
【0036】
また、サービスエリアR3から高速自動車道の本線R1に続く進入路R5に関しては、進入路R5のほぼ中央部に仮想的に設定された境界ラインR51を境界に高速自動車道側には、道路種別として「都市間高速」又は「都市高速」が設定され、リンク種別としては「SA等側線リンク」が設定され、境界ラインR41を境界にサービスエリアR3側には、道路種別として「その他案内道」が設定され、リンク種別として「SA等側線リンク」が設定される。
【0037】
従って、自車の現在の位置に対応する道路種別が、例えば、「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合、一方通行の道路(逆走が許されない高速自動車道)から一方通行以外の道路(図4では、サービスエリアR3)へ移動したとみなすことができる。一方、自車の現在の位置に対応する道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合、一方通行以外の道路(即ち、SA)から一方通行の道路(逆走が許されない高速自動車道)へ移動したとみなすことができる。
【0038】
図1に示す記憶部108の位置情報記憶部108bは、自車の現在の位置情報を記憶する。
道路種別記憶部108cは、自車の現在の位置に対応する道路種別及びリンク種別を記憶する。
【0039】
また、記憶部108のパラメータ記憶部108dは、種々の動作パラメータを記憶する。本実施形態では、特に、高速自動車道の本線からサービスエリア(SA)或いはパーキングエリア(PA)に続く退出路毎に、距離のパラメータ(閾値)L1とL2を記憶する。閾値L2は、各退出路に設定された境界ラインからサービスエリア(SA)又はパーキングエリア(PA)に至るまでの距離+第1の所定量(例えば20m)程度、閾値L1は、距離L2+第2の所定量(例えば、20m)程度に設定されている。閾値L1とL2は、図5(a)に示すように、退出路毎に、境界ラインの位置(緯度X、経度Y)に対応付けて、パラメータ記憶部108dに予め格納されている。
【0040】
図4の例で具体的に説明すると、図5(b)に示すように、退出路R4の境界ラインR41の位置を基準に距離L1とL2が設定されている。閾値L2は、境界ラインR41からサービスエリアR3に至るまでの距離+20mにほぼ等しく、閾値L1は、閾値L2+所定量(例えば、20m)程度に設定されている。このように閾値L1とL2を設定することにより、車両と境界ラインR41との距離が閾値L2より大きくなったときに、車両がサービスエリアR3に入ったこと、車両と境界ラインR41との距離が閾値L1より大きくなったときに、車両がサービスエリアR3内を走行して、退出路R4からある程度離れたことを判別することが可能となる。
【0041】
制御部109は、メモリ内蔵型のワンチッププロセッサ等から構成され、内蔵メモリに記憶されたプログラムに従って、ナビゲーション装置10の各部を制御する。また、制御部109は、タイマ109aとしても機能する。そして、制御部109は、GPS受信機101から供給された位置情報から特定される位置に対応する道路種別及びリンク種別を地図DB108aから取得し、自車の現在の位置と道路の道路種別及びリンク種別の組み合わせが変化した地点との距離に基づいて、逆走のおそれがある旨を報知する。
【0042】
次に、本実施形態のナビゲーション装置10の動作を説明する。
ナビゲーション装置10は、一般的なナビゲーション装置と同様に、GPS受信機101から取得した自車の位置情報、ジャイロセンサ102から取得した自車の方向情報、車速センサ103から取得した自車の車速情報、地図DB108aから取得した地図の画像情報に基づいて、自車の位置を示す地図を表示部106に表示する。ユーザは、表示部106に表示された地図を参照しながら自車を運転する。
【0043】
ナビゲーション装置10は、上述の一般的なナビゲーション動作と並行して、本実施形態に特有の逆走報知(警告)処理を行う。
以下、理解を容易にするため、車両が、図4に示す高速自動車道の本線R1から誘導路R4を通って、サービスエリアR3に入り、その後、本線R1に戻る場合を例にして、ナビゲーション装置10が実行する逆走報知処理について説明する。
【0044】
(1)位置情報の記憶処理
制御部109は、電源投入後、図6に示す位置情報の記憶処理を開始し、まず、タイマ109aのカウンタ値t1を0にリセットして、計時を開始させる(ステップS1)。制御部109は、タイマ109aのカウンタ値t1が所定の時間T1以上であるか否かを判別する(ステップS2)。この時間T1は、制御部109が、GPS受信機101から自車の位置情報を取得する周期に相当する。
【0045】
制御部109は、カウンタ値t1が所定の時間T1未満であると判別した場合(ステップS2;No)、ステップS2を繰り返す。
一方、制御部109は、カウンタ値t1が所定の時間T1以上であると判別した場合(ステップS2;Yes)、GPS受信機101から自車の位置情報を取得する(ステップS3)。制御部109は、取得した自車の位置情報によって特定される位置に対応する道路種別及びリンク種別を地図DB108aから読み出す(ステップS4)。
制御部109は、1周期T1前の道路種別及びリンク種別と現在の道路種別及びリンク種別を比較するため、道路種別記憶部108cに1周期T1前の道路種別及びリンク種別が記憶されているか否かを判別する(ステップS5)。
【0046】
制御部109は、道路種別記憶部108cに1周期T1前の道路種別及びリンク種別が記憶されていないと判別した場合(ステップS5;No)、ステップS9に処理を進め、ステップS4で読み出した道路種別及びリンク種別を道路種別記憶部108cに記憶する(ステップS9)。
【0047】
一方、制御部109は、道路種別記憶部108cに1周期T1前の道路種別及びリンク種別が記憶されていると判別した場合(ステップS5;Yes)、自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別部として、道路種別記憶部108cに記憶されている1周期T1前の道路種別及びリンク種別と、ステップS4で読み出した道路種別及びリンク種別とを比較し、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせに変化したか否かを判別する(ステップS6)。即ち、制御部109は、自車が、退出路を通って、一方通行の道路(高速自動車道)から一方通行以外の道路(SA)へ移動したとみなされるか否かを判別する。
【0048】
制御部109は、道路種別とリンク種別の組み合わせに変化が無いか、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせ以外の組み合わせに変化したと判別した場合、即ち、自車が一方通行の道路(高速自動車道)から一方通行以外の道路(SA)へ移動したとみなされないと判別した場合(ステップS6;No)、ステップS1に処理を戻す。
【0049】
一方、制御部109は、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせに変化したと判別した場合、即ち、自車が一方通行の道路(高速自動車道)から一方通行以外の道路(サービスエリアSA)へ移動したとみなされると判別した場合(ステップS6;Yes)、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶部として、ステップS3で取得した自車の位置情報(以下、道路種別変更地点の位置情報という。)を位置情報記憶部108bに記憶する(ステップS7)。
さらに、制御部109は、パラメータ記憶部108dから、ステップS3で取得した位置に対応付けられている距離L1とL2を読み出す(ステップS8)。この位置は、図4に示す境界ラインR41の位置に相当する。
【0050】
また、制御部109は、ステップS4で読み出した道路種別及びリンク種別を道路種別記憶部108cに記憶する(ステップS9)。
【0051】
その後、制御は、ステップS1に戻り、制御部109は同様の処理を繰り返す。
これにより、自車が一方通行の道路(例えば、高速自動車道)から一方通行以外の道路(例えば、SA、PAや一般道)へ移動した場合、道路種別変更地点の位置情報が位置情報記憶部108bに記憶され、道路種別及びリンク種別が道路種別記憶部108cに記憶される。
【0052】
(2)逆走報知処理
制御部109は、図6に示す位置情報の記憶処理において、道路種別変更地点の位置情報を位置情報記憶部108bに記憶したことを契機として、図7に示す逆走報知処理を開始し、まず、タイマ109aのカウンタ値t2を0にリセットして、計時を開始させる(ステップS11)。制御部109は、タイマ109aのカウンタ値t2が所定の時間T2以上であるか否かを判別する(ステップS12)。時間T2は、制御部109が、GPS受信機101から自車の位置情報を取得する周期に相当する。
【0053】
制御部109は、カウンタ値t2が所定の時間T2未満であると判別した場合(ステップS12;No)、ステップS12を繰り返す。
一方、制御部109は、カウンタ値t2が所定の時間T2以上であると判別した場合(ステップS12;Yes)、GPS受信機101から自車の位置情報を取得する(ステップS13)。制御部109は、取得した自車の位置情報によって特定される位置と位置情報記憶部108bに記憶されている道路種別変更地点の位置情報によって特定される位置との距離を算出する(ステップS14)。制御部109は、算出された距離がステップS8で読み出した所定の閾値L1以上であるか否かを判別する(ステップS15)。
【0054】
制御部109は、算出された距離が所定の閾値L1未満であると判別した場合(ステップS15;No)、後述するステップS17に処理を進める。
一方、制御部109は、算出された距離が所定の閾値L1以上であると判別した場合(ステップS15;Yes)、ThroughFlg(通過フラグ)の値を1に設定する(ステップS16)。
ここで、ThroughFlg(通過フラグ)=1は、道路種別変更地点から所定の閾値L1以上離れたことがあることを示し、ThroughFlg(通過フラグ)=0は、道路種別変更地点から所定の閾値L1以上離れたことがないことを示す。
【0055】
続いて、制御部109は、記憶されている位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したか否かを判別する位置判別部として、ThroughFlg(通過フラグ)=1であり、かつ、ステップS14で算出された距離が閾値L2以下であるか否かを判別する(ステップS17)。即ち、自車が、図9に示すように、道路種別変更地点(境界ライン)R41を中心とする半径L2の円内に入っているか否かを判別する。
【0056】
制御部109は、ThroughFlg(通過フラグ)=1であり、かつ、ステップS14で算出された距離が所定の閾値L2以下であると判別した場合(ステップS17;Yes)、逆走のおそれがある旨を報知する報知部として、図10に示すように、退出路の出口の近傍におり逆走するおそれがある旨を地図画像及びメッセージで表示部106に表示し、音声出力部107からその旨を音声で出力することにより、報知する(ステップS18)。その後、処理はステップS19に進む。
一方、制御部109は、ThroughFlg(通過フラグ)=1であり、かつ、ステップS14で算出された距離が所定の距離L2以下である、という条件を満たさないと判別した場合(ステップS17;No)、ステップS18をスキップして、ステップS19に進む。
【0057】
ステップS19において、制御部109は、逆走報知処理のプロセスを終了する旨の通知(以下、終了通知という。)を受けたか否かを判別する。制御部109は、終了通知を受けたと判別した場合(ステップS19;Yes)、逆走報知処理を終了する。一方、制御部109は、終了通知を受けていないと判別した場合(ステップS19;No)、ステップS11に処理を戻し、同様の処理を繰り返す。
【0058】
これにより、自車が道路種別変更地点から閾値L1以上一旦離れ、その後閾値L2以下の範囲に戻って来た場合に、制御部109は、音声又は表示により、退出路の出口の近くに位置しており逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0059】
(3)位置情報の削除処理
制御部109は、図6に示す位置情報の記憶処理において、道路種別変更地点の位置情報を位置情報記憶部108bに記憶したことを契機として、図8に示す位置情報の削除処理を開始し、まず、タイマ109aのカウンタ値t3を0にリセットして、計時を開始させる(ステップS31)。制御部109は、タイマ109aのカウンタ値t3が所定の時間T3以上であるか否かを判別する(ステップS32)。この時間(T3)は、制御部109が、GPS受信機101から自車の位置情報を取得する周期に相当する。
【0060】
制御部109は、カウンタ値t3が所定の時間T3未満であると判別した場合(ステップS32;No)、ステップS32を繰り返す。
一方、制御部109は、カウンタ値t3が所定の時間T3以上であると判別した場合(ステップS32;Yes)、GPS受信機101から自車の位置情報を取得する(ステップS33)。制御部109は、取得した自車の位置情報によって特定される位置に対応する道路種別及びリンク種別を地図DB108aから読み出す(ステップS34)。制御部109は、自装置が一方通行以外の道路から一方通行の道路に移動したか否かを判別する一方通行進入判別部として、道路種別記憶部108cに記憶されている道路種別及びリンク種別と、ステップS34で読み出した道路種別及びリンク種別とを比較し、道路種別が「その他案内道」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせに変化したか否かを判別する(ステップS35)。即ち、制御部109は、自車が一方通行以外の道路(SA)から一方通行の道路(高速自動車道)に移動したとみなされるか否かを判別する。
【0061】
制御部109は、自車が一方通行以外の道路(SA)から一方通行の道路(高速自動車道)に移動したとみなされないと判別した場合(ステップS35;No)、ステップS31に処理を戻す。
一方、制御部109は、自車が一方通行以外の道路(SA)から一方通行の道路(高速自動車道)に移動したとみなされると判別した場合(ステップS35;Yes)、逆走報知処理のプロセスにこのプロセスを終了する旨の通知(終了通知)をする(ステップS36)。制御部109は、ThroughFlg(通過フラグ)の値を、道路種別変更地点から所定の距離L2以上離れたことがないことを示す0に設定する(ステップS37)。また、制御部109は、位置情報削除部として、位置情報記憶部108bから道路種別変更地点の位置情報を削除する(ステップS38)。
これにより、次に実行される逆走報知処理で使用される通過フラグや位置情報記憶部108bを初期化する。
【0062】
以上の動作を図6乃至9を参照して具体的に説明する。
例えば、図9の軌跡Q1に示すように、車両が移動したとする。この場合、まず、制御部109は、車両が退出路R4の境界ラインR41を越えた時点で、一方通行の道路(高速自動車道)から一方通行以外の道路(SA)への変化を検出する(ステップS6)。そして、車両が退出路を出て一定距離走行した時点で、距離≧閾値L1となって、ThroughFlg=1となる(ステップS16)。ただし、この段階では警報は行わない。その後、距離≦閾値L2の領域に入ると、ステップ17でYesとなって、警報が発せられる(ステップS18)。これにより、ドライバは、逆走のおそれがあることに気が付いて、逆走を回避する。
【0063】
一方、図11の軌跡Q2に示すように、車両が移動したとする。この場合、車両が退出路を出て、一定距離走行した時点で、距離≧閾値L1となって、ThroughFlg=1となる(ステップS16)。その後、車両が進入路R5を走行する間に、境界ラインR51を通過した時点で、制御部109は、一方通行以外の道路(SA)から一方通行の道路(高速自動車道)への変化を検出する(ステップ35)。そして、制御部109は、ThroughFlgと道路種別変更地点の位置情報をリセットし(ステップS37,S38)、次の処理に備える。
【0064】
以上、説明したように、本実施形態によれば、自車が道路種別変更地点から所定の閾値L1以上一旦離れた後、閾値L2以下の範囲に入った場合、制御部109は、音声又は画面により、退出路の出口の近傍に位置しており逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0065】
(変形例)
上記実施形態においては、車両が退出路からサービスエリアに入った後でも、道路種別変更地点から閾値L1以上一旦離れてから、閾値L2以下の範囲に入った場合に警報を発する。この発明は、これに限定されず、車両が道路種別変更地点から閾値L2〜L1以下の範囲にあるときは常に警報を発するようにしてもよい。
【0066】
この場合は、例えば、図7の逆走報知処理のステップS15において、算出された距離が閾値L2より大きくなったときに、ステップS16でThroughFlgをセットするように、構成すればよい。
また、ThroughFlgを使用せず、L1>算出された距離>L2のときに警報を発するようにしてもよい。
また、警報段階を設けても良い。例えば、図7のステップS17で、ThroughFlg=1、L2<算出された距離≦L1と判別されたときは比較的穏やかな警告を行い、ステップS17で、ThroughFlg=1、算出された距離≦L2と判別されたときはけたたましい警告を行うようにしてもよい。即ち、算出された距離が小さくなるに従って、段階的に或いは連続的に警報のレベルを高くしてもよい。
また、L2=L1としてもよい。この場合は、車両が一旦退出路から一定距離L2以上離れて、再びL2以内に入った場合に、警報が発せられる。
L1とL2の設定手法は任意である。例えば、L2=境界ラインとサービスエリアやパーキングエリアの入り口までの距離、としてもよい。
【0067】
また、車両が一方通行の道路から、それ以外のエリアに移動したことを検出する手法は任意である。上記実施形態では、道路の属性情報として「道路種別」と「リンク種別」とを使って、一方通行の道路からそれ以外のエリアへの移動を検出したが、これに限定されない。例えば、一方通行の道路には、一方通行のコードを割り当て、それ以外のエリアには他のコードを割り当てて、現在位置のコードが一方通行のコードから他のコードに変化したときに、一方通行の道路からそれ以外のエリアに移動したと判別してもよい。
【0068】
また、リンク種別を使用せずに、道路種別のみに基づいて、一方通行の道路からその他へエリアへの移動を検出することも可能である。例えば、道路種別が「都市高速」や「都市間高速」から「その他案内道」に変化したときに、一方通行の道路からそれ以外のエリアに移動したと判別するようにしてもよい。
また、道路に付す属性情報のコード体系として、一般のものを例示したが、一方通行の道路からそれ以外のエリアへの移動を検出できる属性情報であれば、情報の種類や割付手法は任意である。例えば、図12に示すように、退出路R4又は進入路R5とサービスエリアSAとの境界にそれぞれ境界ラインR41、R51が設定され、退出路R4及び進入路R5の全範囲に、一方通行を示すコード「01」が設定され、サービスエリアR3の全範囲に、一方通行以外を示すコード「02」が設定されるようにしてもよい。
【0069】
(実施形態2)
実施形態1では、自車が道路種別変更地点から距離L2以内の位置にあるときに、警告を発した。しかし、この範囲にあるときでも、車両が変更地点から遠ざかりつつある場合は、逆走のおそれは無い。そこで、自車が道路種別変更地点から所定の距離範囲に位置し、しかも、車両が道路種別変更地点に近づきつつあると判別した場合のみ、逆走のおそれがある旨を報知するナビゲーション装置10の実施形態を説明する。本実施形態に係るナビゲーション装置10の構成は、実施形態1と同様である。
【0070】
この場合、制御部109は、図13に示すように、図7に示す逆走報知処理のステップS11からS14までの処理と同じ処理(以下、距離算出処理という。)を実行する(ステップS41)。制御部109は、算出された距離が所定の距離L2以下であるか否かを判別する(ステップS42)。
【0071】
制御部109は、算出された距離が所定の距離L2以下でないと判別した場合(ステップS42;No)、ステップ46に処理を進める。
【0072】
一方、制御部109は、算出された距離が所定の距離L2以下であると判別した場合(ステップS42;Yes)、位置情報記憶部108bに1周期T2前に算出された距離が記憶されているか否かを判別する(ステップS43)。ここで、制御部109は、ステップS41からステップS47までの処理を所定の周期T2で繰り返し実行するが、初めてステップS43を実行する場合、位置情報記憶部108bには1周期T2前に算出された距離は記憶されていない。一方、ステップ43を実行する回数が2回目以降の場合、位置情報記憶部108bには1周期T2前に算出された距離が記憶されている。
【0073】
制御部109は、位置情報記憶部108bに1周期T2前に算出された距離が記憶されていないと判別した場合(ステップS43;No)、ステップS46に処理を進める。
【0074】
一方、制御部109は、位置情報記憶部108bに1周期T2前に算出された距離が記憶されていると判別した場合(ステップS43;Yes)、自車の現在の位置に基づいてステップ41で算出された距離が位置情報記憶部108bに記憶されている1周期T2前にステップS41で算出された距離以下であるか否かを判別する(ステップS44)。即ち、制御部109は、自車が道路種別変更地点に近づきつつあるか否かを判別する。
【0075】
制御部109は、算出した距離が位置情報記憶部108bに記憶されている距離より大きいと判別した場合(ステップS44;No)、即ち、自車が道路種別変更地点から離れつつある場合、ステップS46に処理を進める。
【0076】
一方、制御部109は、算出した距離が位置情報記憶部108bに記憶されている距離以下であると判別した場合(ステップS44;Yes)、即ち、自車が道路種別変更地点に近づきつつある場合、逆走のおそれがある旨を表示部106に表示し、音声出力部107からその旨を音声で出力することにより、報知する(ステップS45)。
【0077】
制御部109は、ステップS41で算出された距離を位置情報記憶部108bに記憶する(ステップS46)。制御部109は、逆走報知処理のプロセスを終了する旨の通知(以下、終了通知という。)を受けたか否かを判別する(ステップS47)。
制御部109は、終了通知を受けたと判別した場合(ステップS47;Yes)、逆走報知処理を終了する。一方、制御部109は、終了通知を受けていないと判別した場合(ステップS47;No)、ステップS41に処理を戻し、同様の処理を繰り返す。
【0078】
以上の動作を図9、図11、図13を参照して具体的に説明する。
例えば、図9の軌跡Q1に示すように、車両が移動したとする。この場合、まず、車両が道路種別変更地点を通過し、距離≦L2の範囲を走行する場合、ステップS42でYesであるが、道路種別変更地点から遠ざかっているため、ステップ44でNoとなり、警告は発せられない。しかし、その後、再び、距離≦L2の領域に入ると、ステップS42でYesとなり、道路種別変更地点に近づくため、ステップ44でYesとなって、警告が発せられる。
【0079】
一方、図11の軌跡Q2に示すように、車両が移動したとする。この場合、車両が道路種別変更地点を通過し、距離≦L2の範囲を走行する場合、ステップS42でYesであるが、道路種別変更地点から遠ざかっているため、ステップ44でNoとなり、警告は発せられない。その後、距離>L2であり、ステップS42でNoとなって、警告は発せられない。
【0080】
これにより、自車が道路種別変更地点から所定の距離L2以内の範囲に移動し、かつ、自車の位置と道路種別変更地点との距離が時間の経過に伴って小さくなった場合、即ち、自車が高速自動車道の退出路の近傍に近づきつつある場合、制御部109は、音声又は画面により逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0081】
以上、説明したように、本実施形態によれば、制御部109は、自車が高速自動車道の退出路の近傍に近づいている場合、制御部109は、音声又は画面により逆走のおそれがある旨を報知する。このため、一旦退出した高速自動車道の退出路を逆走する前に逆走のおそれがある旨を報知することにより、ユーザに対して注意を喚起することができる。
【0082】
この発明は上記の実施形態に限定されず、種々の変形及び応用が可能である。例えば、上記説明において、示したハードウェアの構成及び動作のフローチャートは一例でありこれらに限定されるものではなく、適宜変更及び応用が可能である。
【0083】
上記実施形態では、理解を容易にするため、高速自動車道から退出路を通って、SA(又はPA)に入り、その後、この退出路に戻る場合を例にして、ナビゲーション装置10の動作を説明したが、図14に示すように、高速自動車道の本線R1から退出路R4を経由して高速自動車道以外の道路R6(国道、一般道等)に退出した後、この誘導路に戻った場合にも拡張することができる。
この場合、制御部109は、道路種別が「都市間高速」又は「都市高速」からその他の道路種別に変化した場合、自車の現在の位置情報を位置情報記憶部108bに記憶すればよい。
【0084】
上記実施形態では、位置情報の削除処理において、道路種別及びリンク種別の組み合わせの変更に基づいて、道路種別変更地点の位置情報を削除しているが、以下のようにしてもよい。
制御部109は、自車の位置と道路種別変更地点との距離が所定の距離以上となった場合、道路種別変更地点の位置情報を削除してもよい。
また、制御部109は、道路種別変更地点の位置情報を位置情報記憶部108bに記憶してから所定の時間が経過した場合、道路種別変更地点の位置情報を削除してもよい。
【0085】
上記実施形態では、理解を容易にするため、経路案内をしていない場合を例にしてナビゲーション装置10の動作を説明したが、経路案内をしている場合であっても、同様に動作する。
上記実施形態では、本発明に係る逆走報知装置は、ナビゲーション装置10に組み込まれているが、ノートPC(Personal Computer)、携帯電話等に組み込まれていてもよい。
上記実施形態では、音声及び画面(所定のメッセージ、マークを含む)により報知をしているが、LED(Light Emitting Diode)等を用いたインジケータ等により報知をしてもよい。
【0086】
上記実施形態では、道路種別が「都市間高速」又は「都市高速」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合における自車の位置を道路種別変更地点としているが、道路種別が「有料道路」かつリンク種別が「SA等側線リンク」の組み合わせから、道路種別が「その他案内道(一般道)」かつリンク種別が「SA等側線リンク」の組み合わせに変化した場合における自車の位置を道路種別変更地点としてもよい。
結局、自車の位置に対応する道路種別が、逆走が許されない道路種別から該道路種別以外の道路種別に変化した場合における自車の位置を道路種別変更地点とすればよく、上記実施形態で使用した道路種別(都市間高速、都市高速、有料道路等)に限定されない。
【0087】
なお、本発明のナビゲーション装置10は、専用の装置を用いる必要はなく、通常のコンピュータにより実現することができる。例えばコンピュータに上記した各処理を実行させるためのプログラム及びデータを記録媒体(CD−ROM等)に記録して配布し、これをインストールしてOS上で実行することにより、本発明のナビゲーション装置10を実現できる。また、プログラム及びデータの配布は、CD−ROM等に限らず、通信回線等を介して行われてもよい。
【符号の説明】
【0088】
10 ナビゲーション装置
101 GPS受信機
102 ジャイロセンサ
103 車速センサ
104 VICS受信機
105 操作部
106 表示部
107 音声出力部
108 記憶部
108a 地図データベース
108b 位置情報記憶部
108c 道路種別記憶部
108d パラメータ記憶部
109 制御部
109a タイマ
R1 本線
R2 本線
R3 サービスエリア
R4 退出路
R5 進入路
R6 高速自動車道以外の道路
R41 境界ライン
R51 境界ライン
【特許請求の範囲】
【請求項1】
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別部と、
前記一方通行退出判別部によって自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶部と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別部と、
前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知部と、を備える、
ことを特徴とする逆走報知装置。
【請求項2】
自装置の現在位置を判別する現在位置判別部を更に備え、
前記一方通行退出判別部は、
道路の情報と道路の属性情報とを記憶する道路情報記憶部と、
前記現在位置判別部が判別した現在位置から道路を特定し、該道路の属性情報に基づいて、一方通行を退出したことを判別する退出判別部と、を更に備える、
ことを特徴とする請求項1に記載の逆走報知装置。
【請求項3】
前記位置判別部は、自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったか否かを判別し、
前記報知部は、前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったと判別された場合、逆走のおそれがある旨を報知する、
ことを特徴とする請求項1又は2に記載の逆走報知装置。
【請求項4】
前記報知部は、自装置が前記記憶部に記憶された位置情報が示す位置と自装置の現在位置との距離が小さくなるに従って、警報のレベルを高める、
ことを特徴とする請求項1乃至3のいずれか1項に記載の逆走報知装置。
【請求項5】
自装置が一方通行以外の道路から一方通行の道路に移動したか否かを判別する一方通行進入判別部と、
前記一方通行進入判別部によって自装置が一方通行以外の道路から一方通行の道路に移動したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の逆走報知装置。
【請求項6】
自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたか否かを判別する距離判別部と、
前記距離判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の逆走報知装置。
【請求項7】
前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したか否かを判別する期間経過判別部と、
前記期間経過判別部によって前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の逆走報知装置。
【請求項8】
前記報知部は、音声、画面のうち、少なくとも1つを用いて逆走のおそれがある旨を報知する、
ことを特徴とする請求項1乃至7のいずれか1項に記載の逆走報知装置。
【請求項9】
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別ステップと、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知ステップと、を備える、
ことを特徴とする逆走報知方法。
【請求項10】
コンピュータに、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別手順と、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知手順と、を実行させる、
ことを特徴とするプログラム。
【請求項1】
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別部と、
前記一方通行退出判別部によって自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶部と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別部と、
前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知部と、を備える、
ことを特徴とする逆走報知装置。
【請求項2】
自装置の現在位置を判別する現在位置判別部を更に備え、
前記一方通行退出判別部は、
道路の情報と道路の属性情報とを記憶する道路情報記憶部と、
前記現在位置判別部が判別した現在位置から道路を特定し、該道路の属性情報に基づいて、一方通行を退出したことを判別する退出判別部と、を更に備える、
ことを特徴とする請求項1に記載の逆走報知装置。
【請求項3】
前記位置判別部は、自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったか否かを判別し、
前記報知部は、前記位置判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離以内の範囲にあり、自装置の位置と前記記憶部に記憶された位置情報が示す位置との距離が時間の経過につれて小さくなったと判別された場合、逆走のおそれがある旨を報知する、
ことを特徴とする請求項1又は2に記載の逆走報知装置。
【請求項4】
前記報知部は、自装置が前記記憶部に記憶された位置情報が示す位置と自装置の現在位置との距離が小さくなるに従って、警報のレベルを高める、
ことを特徴とする請求項1乃至3のいずれか1項に記載の逆走報知装置。
【請求項5】
自装置が一方通行以外の道路から一方通行の道路に移動したか否かを判別する一方通行進入判別部と、
前記一方通行進入判別部によって自装置が一方通行以外の道路から一方通行の道路に移動したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の逆走報知装置。
【請求項6】
自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたか否かを判別する距離判別部と、
前記距離判別部によって自装置が前記記憶部に記憶された位置情報が示す位置から所定の距離だけ離れたと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の逆走報知装置。
【請求項7】
前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したか否かを判別する期間経過判別部と、
前記期間経過判別部によって前記位置情報記憶部が位置情報を記憶部に記憶した時点から所定の期間が経過したと判別された場合、前記記憶部に記憶された位置情報を削除する位置情報削除部と、を更に備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の逆走報知装置。
【請求項8】
前記報知部は、音声、画面のうち、少なくとも1つを用いて逆走のおそれがある旨を報知する、
ことを特徴とする請求項1乃至7のいずれか1項に記載の逆走報知装置。
【請求項9】
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別ステップと、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別ステップと、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知ステップと、を備える、
ことを特徴とする逆走報知方法。
【請求項10】
コンピュータに、
自装置が一方通行の道路から一方通行以外の道路に移動したか否かを判別する一方通行退出判別手順と、
自装置が一方通行の道路から一方通行以外の道路に移動したと判別された場合、自装置の位置を示す位置情報を記憶部に記憶する位置情報記憶手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動したか否かを判別する位置判別手順と、
自装置が前記記憶部に記憶された位置情報が示す位置から第1の距離以上離れた後、第2の距離以内の範囲に移動したと判別された場合、逆走のおそれがある旨を報知する報知手順と、を実行させる、
ことを特徴とするプログラム。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】

【図9】

【図10】

【図11】

【図12】

【図13】

【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−47643(P2012−47643A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−191378(P2010−191378)
【出願日】平成22年8月27日(2010.8.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月27日(2010.8.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]