
Fターム[2C150EB01]の内容
玩具 (16,863) | 動力源、動作又は機能を得るための手段 (1,440) | モーター (469)
Fターム[2C150EB01]に分類される特許
261 - 280 / 469
脚式移動ロボット
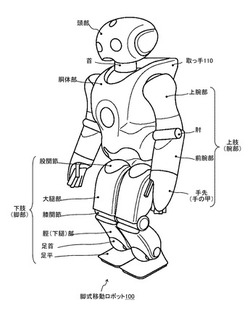
【課題】胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供する。
【解決手段】胴体後方の上端に取っ手を配置し、歩行中や脚式作業中や暴走中には、オペレータは機体の後方からロボットを追いかけて、取っ手を把持することによって容易に捕まえることができる。また、取っ手を操作中に万一足部や腕部が暴走しても、取っ手を掴むオペレータの腕に危害を被る心配がない。また、取っ手の把持部分は緊急停止機構を兼ね備えており、オペレータが取っ手を把持することを検出すると、全身の関節アクチュエータを脱力させる。
(もっと読む)
筋力トレーニング装置

【課題】第1の関節軸と第2の関節軸とを結ぶリンクの長さの調整に伴って、ワイヤの長さが自動的に調整され、トルク発生源のトルク制御によってワイヤの初期張力を安定して再現することができ、筋力トレーニングを効果的に行うことができるようにする。
【解決手段】ベース部に固定された第1関節軸と、第1関節軸の周りに回転可能で長さが調節可能な第1リンクに設けられた第2関節軸と、第2関節軸の周りに回転可能な第2リンクとを有し、第2リンクは、第2関節軸と同軸の第2プーリと、第2プーリを正転及び逆転方向に駆動する2系統のワイヤとによって、第1関節軸と同軸に設けられた第1プーリにより駆動され、第1プーリは、相互に分離した正転方向の系統のワイヤを巻き付けるプーリと逆転方向の系統のワイヤを巻き付けるプーリとから成り、プーリの角度関係を変化させることによってワイヤの長さを調整する。
(もっと読む)
エネルギー効率の良いロボットシステム
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムは、枠を有する本体を含む。エネルギー回復機構は枠内に懸架される。エネルギー回復機構は荷重、荷重と枠とを相互接続する機械的エネルギー蓄積機構、及び荷重と枠に固定されたガイド手段を含む。機械的エネルギー入力機構は荷重と電気エネルギー発生機構とを相互接続する。出力手段は生成された電気エネルギーをエネルギー蓄積装置に移す。ロボットはまた本体部分に接続された脚を含む。受動型の動歩行中の周期的な脚の運動は、機械的エネルギー蓄積機構を通じて荷重に伝達され、結果として生じる荷重の振動運動は、機械的エネルギー入力機構によって電気エネルギー発生機構に移される。 (もっと読む)
走行玩具システム
【課題】 市販の模造玩具に改造を施すことなく、トラック部材上をアタッチメントに支持した状態で走行させることができる走行玩具システムを提供する。
【解決手段】 自走台車5をトラック部材3上で走行させる。走行台車5の台座6Aにアタッチメント7を設ける。アタッチメント7は、改造が施されていない市販の模造玩具ITと部分的に係合する複数の係合部41A乃至41Dを有して市販の模造玩具を支持する。アタッチメント7は、市販の模造玩具の寸法に応じて複数の係合部41A乃至41Dの位置関係を変更し得るように構成されている。
(もっと読む)
走行玩具システム
【課題】 市販の模造玩具に改造を施すことなく、トラック部材上を被牽引体に支持した状態で走行させることができる走行玩具システムを提供する。
【解決手段】 自走牽引車5に牽引されてトラック部材3の表面3Cを走行する被牽引体7を備えている。被牽引体7は、改造が施されていない市販の模造玩具ITと部分的に係合する複数の係合部41A乃至41Dを有して市販の模造玩具を支持するアタッチメント43を備えている。アタッチメント43は、市販の模造玩具の寸法に応じて複数の係合部41A乃至41Dの位置関係を変更し得るように構成されている。
(もっと読む)
移動玩具及びそれを用いた移動玩具セット
【目的】 走行面の通電状態を検知して走行する軌跡を複雑且つ任意に設定できると共に、容易な手段で遠隔操作できる移動玩具を提供する。
【構成】 玩具本体2に装備したモータ3の駆動によって可動する一対の移動体5を備えた移動玩具1であって、前記玩具本体2下部に少なくとも3つの素子からなる通電検知手段6を有してなる。各素子間の通電状態によって両方又は片方の移動体5を選択的に可動させる。外部からの音声を検知する音声検知手段7を有する。音声を検知することで前記モータ3の駆動を制御する。音声発生手段8を有する。前記移動玩具1と、発音具とからなる移動玩具セット。前記移動玩具1と、水付着具とからなる移動玩具セット。
(もっと読む)
走行路の一部に設置された磁石により走行制御される電動走行玩具
【課題】走行体に搭載した電動モーターによって車輪を駆動して走行路を自走する走行玩具において走行体へ与える指示を簡単な電気的方法で遠隔操作可能とする。
【解決手段】走行体2に搭載した電動モーター6によって車輪5を駆動して走行路1を自走する走行玩具2において、走行体2には走行路1上の一部に設置された磁石3を検出するための磁気センサ4と、上記磁気センサ4からの信号を受け取って走行用モーター6の回転を制御するための制御装置を搭載し、磁気センサ4が走行路1上の磁石3を検出すると、上記制御装置は、磁石3の配置パターンに応じて上記走行体2の走行する方向を逆転させる、または上記走行体2の走行速度を上げる、または上記走行体2の走行速度を下げる、または上記走行体2を停止させるように走行用モーター6の制御を行う。
(もっと読む)
走行玩具並びに無線操縦走行玩具
【課題】実物同様な操作感を体験できる変速装置が設けられた、走行玩具並びに無線操縦走行玩具を提供する。
【解決手段】シフトレバー4は、シャーシ後部6の後部車輪軸8とモータ部を被覆するギアボックス10が設けられ、その上部にクランクボックス12が配置される。このクランクボックス12の更に上段に第二スライダ部14が配置され、さらにその上に第一スライダ部16が配置され、この第一スライダ部16の上にシフトレバー4の軸部であるシフト軸18が立設する。このシフト軸18の上にシフトレバー4を操作するための把持部20が配置する。
(もっと読む)
羽ばたき航空機
【課題】ホバリング能力が高く、狭い場所であっても飛行することが可能な羽ばたき航空機の提供。
【解決手段】軸2aを中心として羽ばたき動作する複数の翼31L,31R,32L,32Rを備え、翼31L,31R,32L,32Rは、羽ばたき動作時に少なくとも3箇所でクラッピング動作を行う。これにより、翼面同士の間に挟み込まれた空気が翼面に平行な方向に少なくとも3箇所で噴出し、推力を発生する。これにより、本発明の羽ばたき航空機は、空中でホバリングを行うことができる。
(もっと読む)
情報再生装置及び情報入力装置
【課題】 フィギアやカードを用いて多彩な出力が可能な情報再生技術を提供する。
【解決手段】 少なくとも底部にドットパターンが形成されたフィギアと、前記フィギアが載置されるステージと、前記ステージに設けられた1又は2以上の読取孔より読取光を照射してその反射光でドットパターンを読み取る光学読取手段と、前記読取結果に対応した音声情報および/又は画像情報を記憶する記憶手段と、前記記憶手段から読み出した音声および/または画像情報を出力する出力手段とを備えた台座とからなる情報再生装置としたことによって、フィギアの底面のドットパターン毎に異なる音声等を出力することができるため、ユーザに対して、あたかもフィギアのキャラクタが発声しているような親近感を抱かせることができる。
(もっと読む)
対話型玩具及びエンタテインメント装置
エンタテインメントシステムは、エンタテインメント装置と、対話型玩具とを備える。エンタテインメント装置は、動作中に対話型玩具の物理的能力を記述するデータを対話型玩具から受信するように構成される無線受信機と、対話信号を生成する処理手段と、動作中に対話信号を対話型玩具へ送信するように構成される無線送信機とを備え、生成された対話信号は、対話型玩具の物理的能力を記述するデータに応答する。対話型玩具は、動作中に該対話型玩具の物理的能力についての情報を要求する問い合わせ信号を受信するように構成される無線受信機と、該対話型玩具の能力を記述するデータを提供するためのデータ提供手段と、動作中に問い合わせ信号に応答して該対話型玩具の物理的能力を記述するデータを送信するように構成される無線送信機とを備える。エンタテインメント装置は、動作中にエンタテインメント装置によってプレイされているメディアコンテンツに応答する対話型玩具へ対話制御データを送信するように構成され、対話制御データは、対話型玩具から該エンタテインメントシステムへ事前に送信されている受信側対話型玩具の物理的能力にさらに応答する。 (もっと読む)
音声反応ぬいぐるみ
【課題】 かわいい外観を備えると共に、音声通信において用いる送受信器として実用的に用いることができる音声反応ぬいぐるみを提供する。
【解決手段】 音声反応ぬいぐるみ1は、ぬいぐるみ本体2と、当該ぬいぐるみ本体2に内蔵された音声入力手段11及び音声出力手段12と、音声記憶再生手段13と、音声出力手段12から出力される音声と同期して稼働する可動手段14と、外部端子31a,31bが挿入される出力端子16及び入力端子17とを備え、外部端子31a,31bはパーソナルコンピュータと接続され、パーソナルコンピュータを介した音声通話時における送受話器として用いるものである。
(もっと読む)
自走体バッテリーの充電装置
【課題】 自走体が充電装置に進入する際に、自走体が正常に進入できない方向を向いて自走してきたときであっても、その走行方向を適正な向きになるように機械的手段により自走体の走行力を利用して修正させる。
【解決手段】 座板部10と、給電側端子部30と、自走体Bの走行方向を修正するガイド手段40と、ガイド手段40がその動作を開始するのに先立って自走体Bを転向させる転向手段60とを有する。転向手段60が自走体Bの右輪110と左輪120との対向間隔よりも長いリブでなる。転向手段60としてのリブは、座板部10の傾斜した乗上り面12に配備する。
(もっと読む)
走行玩具
【課題】車両連結および電気的接続が容易に行え、しかも車両連結構造および電気的接続構造が容易な走行玩具を提供すること。
【解決手段】回路構成部品を搭載する車両が互いに連結される部分を有する走行玩具であって、車両の各々には該車両同士を連結するための連結アームが付設され、各連結アームの先端には、互いに電気的に絶縁された2つの磁性体が配設され、一方の車両における2つの磁性体と他方の車両における2つの磁性体とが互いの導電性磁着面にて1対1で磁着されるように構成され、導電性磁着面は、該導電性磁着面が設けられた車両に搭載の回路構成部品に電気的に接続され、一方の車両における2つの磁性体と他方の車両における2つの磁性体とが互いの導電性磁着面にて磁着された際に同時にその磁着部分を介して両車両間の回路構成部品が電気的に接続されるように構成されている。
(もっと読む)
手投げ式ロボット
【課題】突起物がなくても架台の回転を防止し、略ボール状に縮小を変形可能とした。
【解決手段】モータ4を内蔵した架台2と、架台の左右にギアボックス9を介してモータに連繋して回転可能で、内部中空の略半球状の1対の可動輪3と、ギアボックス9内において可動輪3の駆動軸12と同一軸線上に配置され、可動輪の回転方向に対して常時逆転方向に回転することにより、架台2を静止状態に保持する逆転機構とを備え、駆動軸12を可動輪3に設けた軸受部11に対して軸方向に移動可能に連結し、可動輪3同士を軸方向に沿って離接可能に連結した。
(もっと読む)
弦楽器用マニピュレータ、及び弦楽器演奏ロボット
【課題】簡便にビブラート奏法を行なうことができる弦楽器用マニピュレータ、及びそれを用いた弦楽器演奏ロボットを提供すること。
【解決手段】本発明の一態様に係る弦楽器用マニピュレータは、弦51を指板52に押し当てる押し当て部材21と、押し当て部材21を保持する本体部20と、本体部20を指板52に対して近接離間させる左手用アクチュエータ13と、押し当て部材21を本体部20に対して回動可能に支持するシャフト22と、本体部20と押し当て部材21との間に設けられ、押し当て部材21を指板52に押し付ける方向に付勢するねじりばね26と、を備え、左手用アクチュエータ13が指板52を本体部20に対して近接離間させることによって、押し当て部材21が回動して弦方向の押し当て位置が変化するものである。
(もっと読む)
自動ヘリコプタ
遊戯用または群れでの監視システム用の自律的ヘリコプタであって、該ヘリコプタは、完全自動飛行制御手段を備え、また、その飛行は、その高度自動制御装置によって安定し、自動化されており、該自動制御装置は二つの光学受信器(14)、光学発信器(13)、光学受信器(14)からの信号の二つの処理チャネル、及び、二つのプロペラ(11)、(12)を受信した信号の和に比例する速度に制御する二つのモータ(16)を備え、二つの光学受信器(14)の信号の差によって制御される方向決定装置によって障害物を回避し、二つの揚力提供用プロペラの軸の前方にその重心をずらすことによって一定速度で前進する。 (もっと読む)
ラジコン模型のサーボモータ中立位置設定装置
【課題】サーボモータの出力軸にサーボホーンを嵌合する単純構造で高い精度で中立位置を設定可能としたラジコン模型のサーボモータ中立位置設定装置を提供する。
【解決手段】サーボモータ1の出力軸20のサーボホーン40の嵌合穴50と嵌合する部分を角柱とし、該角柱の外側壁の少なくとも1面にサーボホーン40の嵌合穴50の挿入方向と平行に形成された凸条20Aを形成し、嵌合穴50の内側壁の少なくとも1面に出力軸20の外側壁に有する凸条20Aの形成方向と同方向に形成されて当該凸条に嵌合する凹条50Aを設け、筐体側に、サーボモータ1の出力軸20の一方向での最大回転角度と該一方向と逆の方向での最大回転角度を規制する制限する構造を設け、サーボモータ1の出力軸20が一方向と逆方向の最大回転角度位置にある時のポテンショメータの各出力値の中間値をサーボモータの出力軸の標準中立位置と定める。
(もっと読む)
ラジコン模型
【課題】操縦者(取り扱い者)等の安全を確保すると共に、ラジコン模型自身の安全確保も実現したラジコン模型を提供する。
【解決手段】中央制御装置3に有する安全管理部312は、バッテリー27が正しく接続された時は、ブザー制御部313にバッテリーが接続されたことを示す第1パターン鳴動信号指令を供給し、バッテリーが正しく接続された状態でスタートボタンが押されているチェック期間は、ブザー制御部313にスタート操作中を示す第2パターン鳴動信号指令を供給し、チェックによって正常と判定した場合には、ブザー制御部313に動力モータ7が駆動可能なスタンバイ状態になったことを告知する第3パターン鳴動信号指令を供給する判定部314を有する。
(もっと読む)
ラジコン模型の統合制御システム
【課題】ラジコン模型に搭載される電子制御機器の制御、動作、異常検出などの情報を連携して管理し、制御の実行を総合判断することで安全性を高め、かつ操縦性能を向上する。
【解決手段】受信機2からの操縦指令信号、センサ部20で検出された各種の検出信号、設定値格納部40Aに格納されている設定値、ID格納部40Cに格納されたバッテリー17、動力モータ7、操舵用サーボモータ8,9,10の識別データは統合制御装置50において、その統合制御部50Aで連携処理される。1つの制御値が単独で実行されることなく、他の関連する操縦指令信号のデータやセンサの検出データを参照して、安全で効果的な飛行制御を可能にする。
(もっと読む)
261 - 280 / 469
[ Back to top ]