
Fターム[2C150EB01]の内容
玩具 (16,863) | 動力源、動作又は機能を得るための手段 (1,440) | モーター (469)
Fターム[2C150EB01]に分類される特許
221 - 240 / 469
歩行玩具
【課題】単に前足と後足とを動かして前進するだけではなく頭部を動かしながら歩行させることができるとともに、頭部を交換することにより頭部の動きが異なり、飽きのこない歩行玩具を提供すること。
【解決手段】頭部4を揺動させながら前足2と後足3とを前後に回動させて歩行する、以下の要件を備えることを特徴とする歩行玩具。
(イ)前記頭部4は玩具本体1に着脱可能であること
(ロ)玩具本体1には前足2と後足3とに設けた支軸12、16を回動可能に支持する軸受13、17を設けたこと
(ハ)上記前足2の支軸12は上記頭部を揺動駆動する駆動部材22が着脱可能に形成されていること
(ニ)上記前足2が回動すると上記支軸12に装着した駆動部材22は前足2と連動して回動すること
(ホ)上記駆動部材22は上記頭部4に係合し、前足2の回動に連動して頭部4を揺動させること
(もっと読む)
ロボット

【課題】ロボットに「ぬくもり」(温度)を与えることで、使用者がロボットの「体温」を感じ取ることができ、その結果、動物に接触している感覚に近いロボットを提供する。
【解決手段】ロボット(1)は、電気的動作をすることで発熱する発熱源(61)を内部に備える。また、ロボット(1)は、発熱源(61)の発熱を吸収する熱吸収部(71)と、ロボット(1)の外装部に放熱する複数の放熱部(73)と、熱吸収部(71)から各放熱部(73)へ熱を伝導する熱伝導部(72)とで構成される熱伝導手段(70)を備える。熱伝導部(72)を、熱伝導部(72)の断面積が、熱吸収部(71)から放熱部(73)に至る熱伝導部(72)の経路長が長い程大きくなるように形成した。
(もっと読む)
ラジオコントロール用モータ制御装置
【課題】 送信機によって操作される電気自動車等の被制御体に搭載されるモータの駆動制御を行うモータ制御装置において、送信機の操作子の一つの操作にブレーキと後進が割り当てられているものがあり、ブレーキと後進の切替えを容易に行えるようにする。
【解決手段】 記憶部5に記憶された受信機から出力された復調信号に含まれるブレーキ出力量の特定の値である切替え基準値と、前記ブレーキ出力量を切替え判別部8において比較して、前記ブレーキ出力量の方が大きかったときに切替え信号を制御部2に出力し、制御部2では切替え信号を受け取った後に操作子をニュートラルポイントに操作すると前記操作子の操作状態の割り当てをブレーキから後進に切替える制御を行う。また、切替え基準値は外部機器13で操縦者が任意に変更できる。
(もっと読む)
モーターロボット
【課題】 動作の意外性を有するモーターロボットを提供する。
【解決手段】 前輪12aとウエイト部30aとが第1の回転体になると共に、前輪12bとウエイト部30bとが第2の回転体となり、軸体27の回転によって、ウエイト部30a、30bに部分的に遠心力が生じる。すると、この遠心力によって前輪12a、12bと接続されている軸体27の軸方向に対して直交する方向に歪みが生じる。歪みが生じた軸体27が回転動作を続けると軸体27の歪みが振動発生源となり、軸体27を支持する車体3が振動することで、前バンパー4と後バンパー5とに振動が伝達される。これによって、モーターロボット1は脚体となる前バンパー4と後バンパー5とを介して、種々の方向へ移動することになる。
(もっと読む)
関節連結されたコンピューター生成キャラクターからアニマトロニクスユニットを設計するための方法および装置
アニマトロニクスユニットに対する設計を特定する方法は、芸術的に決定された動きを含む動きのデータを受信することと、動きのデータに応答してアニマトロニクスユニットの少なくとも一部分の構成に対する設計を決定することと、アニマトロニクスユニットの構成に対する設計を出力することとを包含する。一実施形態において、アニマトロニクスユニットの挙動を決定する方法は、複数の制御信号を用いてアニマトロニクスユニットの少なくとも一部分のソフトウェアシミュレーションを駆動することによって、複数の制御信号に応答してアニマトロニクスユニットの少なくとも一部分の該挙動を推定することを包含する。  (もっと読む)
(もっと読む)
ロボット玩具およびその組立方法
【課題】ロボット玩具のホームポジションとサーボ・ゼロ位置とを簡単に合致させる。
【解決手段】ロボット玩具1は、サーボ3が取り付けられたブロック10と、ボス21aにサーボ3の出力軸34が嵌合することによってブロック10に連結される他のブロック21と、サーボ3を制御する制御装置100とを備える。サーボ3には、出力軸34に追従して回転する回転盤33aと、回転盤33aに対向して配設されるとともに、ユーザ操作に基づいて回転盤33aと平行な面内で当該回転盤33aに対して相対回転する回転盤33bと、回転盤33a,33bにおける基準線33c,33d同士の相対角度を検出する回路パターン8,9とが設けられている。制御装置100は、出力軸34とともに回転盤33aを回転させ、前記相対角度が0となるときのサーボ3の位置を中心位置としてサーボ3を制御する。
(もっと読む)
振動移動装置
【課題】 ギヤやリンク等の部品を使用することなく、きわめて簡単な機構で移動を可能とする振動移動装置を提供する。
【解決手段】 移動体本体11と、移動体本体11に備えられ、移動体本体11の外周に沿って進行する振動波を発生させる振動発生手段17と、振動発生手段17の動作を制御する制御手段15と、移動体本体11に取り付けられる弾性を有する複数の支持手段21と、支持手段21の下部側に設けられ、方向によって接地面Gとの摩擦抵抗の異なるソール部材23とを備え、振動発生手段17によって移動体本体11の外周に沿って進行する振動波を発生させることにより、支持手段21を介して接地面Gに作用する振動波の反作用によって移動体本体11を移動させることを特徴とする。
(もっと読む)
安定走行可能なラジコン模型自動車
【課題】本発明の目的とするところは、操縦者の技量のみに頼るのではなく、模型自動車にスピン防止が可能となる装置を装備させることで、万人が模型自動車の自律安定走行の効果を享受できるようにした安定走行可能なラジコン模型自動車を提供することにある。
【解決手段】
コントロール信号で出力が調整される動力用モーターと、コントロール信号でタイヤの操舵角を調整するステアリングサーボとを備え、走行体がスピンを開始して回転角が変化したときに、その変化を回転角変化検知信号としてコントロール回路に送信できるジャイロセンサーを備え、このコントロール回路に回転角変化検知信号が送信された際に、ステアリング戻し信号がコントロール回路からステアリングサーボに対して発せられると共に、モーター出力低下信号がコントロール回路から動力用モーターに対して発せられることを特徴とする。
(もっと読む)
弦楽器演奏ロボット、及びその制御方法
【課題】簡便に異常を検知することができる弦楽器演奏ロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様に係る弦楽器演奏ロボットの制御方法は、演奏データにしたがって弦楽器を演奏する弦楽器演奏ロボットの制御方法であって、演奏データに基づいて弦を振動させ、弦の振動によって発生した音の音高を検出するステップS102と、演奏データに対応する音の音高と前記検出した音高との比較結果に応じて、異常を検知するステップS104と、を備えるものである。
(もっと読む)
電動式遊戯銃用電子制御装置
【課題】電動式遊戯銃の消費電力を低減し、誤作動と故障を防止、実銃の機械式機能を電装式機能から実現する。
【解決手段】主に論理制御部(2)、電源管理部(3)、出力管理部(4)で構成され、引き金(8)の操作に連動して入力される主入力装置(5)の操作で電池(6)の電力をモーター(7)に供給する基本装置(1)で、歯車の状態と電気の流れを監視、管理し、問題発生時に装置全体を自動で停止、遮断することで誤作動と故障を防止し、信頼性を向上させ、電動式遊戯銃の部品((11)、(14)、(19)、(21))と連動するか、単独で動作する専用装置((9)、(10)、(12)、(13)、(15)、(16)、(17)、(18)、(20)、(22)、(23))を接続することで動作する各種の拡張機能から実銃の機械式機能を実現し、一元管理することで、取り扱いの利便性を追及する。
(もっと読む)
おもちゃ
【課題】最小限の部材を使用するだけの簡単な構造で興趣に富んだ動作をすることができ、かつその動作に伴って倒れたり、位置が変動したりしないおもちゃを提供する。
【解決手段】柔軟性部材で構成された頭部、略円筒状の胴体部、及び吸盤部からなるおもちゃであって、頭部及び胴体部は一体成形されており、 胴体部と吸盤部とは前記吸盤部の上部を前記胴体部の下部に嵌め込むことによって接合されている。そして、前記吸盤部は一体成形された略円筒状の上部及び逆お椀型の下部とから構成されおり、吸盤部下部の逆お椀型の最大直径は吸盤部上部の略円筒状の最大直径の1〜3倍であり、吸盤部の逆お椀型の部分を床面や壁面などに吸着させることによって使用する。
(もっと読む)
バランス特性を改良する単回転翼模型ヘリコプター
本発明に係る単回転翼模型のヘリコプターは、主軸と、主軸に設けられたローターグリップと、ローターグリップに設けられた一対の回転翼と、一対のミキシングアームとを備え、前記ヘリコプターは、さらに制御システムとバランスシステムとを備える。その中、一対のミキシングアームは、それぞれ前記ローターグリップの両側に設けられ、かつその中心にいる軸孔を通じて、ローターグリップの両側におけるピッチ・ロッカーアームに回動可能に接続されて、回転翼の迎え角を制御する。前記ミキシングアーム毎に、二つのコントロール点があり、一対のミキシングアームにおける対角が対向する第1のコントロール点(複数)は、前記制御システムにより転送された周期的なトルクによりコントロールされ、対角が対向する第2のコントロール点(複数)は、バランスシステムによりコントロールされ、かつ前記バランスシステムによりコントロールする第2のコントロール点(複数)と、前記傾斜盤組合せによりコントロールする前記第1のコントロール点(複数)とは、お互いに支点運動する。本発明に係る単回転翼模型のヘリコプターは、制御の感度及び動的安定性について独立に調整することができるので、模型ヘリコプターの動的安定性と制御性との好ましい組合せを探すことができる。 (もっと読む)
コミュニケーション誘発システム
【課題】ぬいぐるみのような擬人的媒体を使ってユーザからのコミュニケーションを誘発できるシステムを提供する。
【解決手段】コミュニケーション誘発システム10は、ユーザ12の前方に配置されたぬいぐるみ14を含む。視線サーバ18がカメラ16で撮影したユーザ12の顔の画像からユーザの視線の方向を推定する。ぬいぐるみ14に内蔵したコンピュータは、ユーザの発話状態およびユーザの視線状態に応じて両者の間のコミュニケーション状態を推定または特定する。そして、そのコミュニケーション状態に従ってユーザにコミュニケーションを促すことができるように、ぬいぐるみの行動(発話および/または動き)を制御する。
(もっと読む)
自動車玩具
【課題】グリップ走行及びドリフト走行の切り替えが簡単にできる自動車玩具を提供すること。
【解決手段】走行用直流モータから前輪までの動力伝達経路には、走行用直流モータが後輪を前進方向に回転させるときに走行用直流モータと前輪とを連結させて前輪を前進させる方向に回転させる一方で、走行用直流モータが後輪を後進方向に回転させるときに走行用直流モータと前輪との連結を解除させて前輪を前進方向に空転可能な状態とするクラッチ機構が設けられ、
プレイヤが前記外部コントローラによって選択したモードが前進モードから後進モードに切り替わった際、後進モードの選択時から所定時間、走行用直流モータを強制的に停止させることを特徴とする。
(もっと読む)
羽ばたき飛行装置
【課題】フェザリング運動を利用することなく、簡単な構造で羽ばたき運動による低速飛行を可能にすることができ、安定した飛行ができる羽ばたき飛行装置を提供する。
【解決手段】胴部11と、胴部を軸にして羽ばたき運動を行う左右一対の主翼12とを備え、各主翼がシート状の翼面部材15と翼面部材の前縁を支持する翼骨部材14とを有する羽ばたき飛行装置であって、胴部に支持される動力源21と、動力源で発生した動力を翼骨部材に伝達して翼骨部材の振り下ろし動作および振り上げ動作を行わせる翼骨運動機構と、少なくとも振り下ろし動作時の翼面部材の形状、または、振り上げ動作時の翼面部材の形状のいずれかを能動的に変形させる翼面形状変形手段23,24とを備え、振り下ろしと振り上げの翼面形状を積極的に変化させて空気力を変化させる。
(もっと読む)
自動走行装置
【課題】障害物を回避することが可能な自動走行装置であって、操作者の意思に近い動作をすることができる自動走行装置を提供することである。
【解決手段】駆動源と該駆動源により駆動される駆動輪とを有し、該駆動輪の駆動によって走行体を自動的に走行させるとともに、前記走行体に回転可能に固定された自動走行装置において、前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記駆動輪を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行う。
(もっと読む)
脚式移動ロボット
【課題】姿勢安定制御や基本姿勢の維持などの観点から機体の各部位毎の質量分布を最適化する。
【解決手段】脚部における質量分布として、股関節ピッチ軸12と膝ピッチ軸14の間の部位の重心は、基本立ち姿勢と抱き上げ(直立状態)姿勢間で、股関節ピッチ軸と重力加速度ベクトルで構成される平面上に設定されている。これによって、直立状態において基本立ち上げ姿勢と抱き上げ状態を経る間における安定な姿勢遷移を実現することができる。
(もっと読む)
玩具構築システム
玩具構築システムであって、対応する機能を実行し、1つ又は複数の他の構築要素と通信する制御接続手段を含む、1つ又は複数の機能構築要素を含む複数の構築要素と、1つ又は複数の機能構築要素を制御するための1つ又は複数の論理コマンドを生成するためのプログラミング環境を提供するデータ処理システムと、データ処理システムとのデータフロー接続を提供し、且つデータ処理システムからの上記論理コマンドを受信する第1の接続手段、上記論理コマンドを、少なくとも1つの上記機能構築要素の機能を制御するための制御信号に変換するようになっている処理ユニット、及び機能構築要素の制御接続手段を介して少なくとも1つの機能構築要素との制御接続を提供し、且つ制御信号を出力する第2の接続手段を備える、インタフェース構築要素とを備える玩具構築システム。 (もっと読む)
回転玩具
【課題】導体パターンや接触子を用いた機械的接触から、電磁誘導作用を用いて電力供給することにより、無接点で安全な回転玩具を供給することを目的とする。
【解決手段】モータMを備えた回転玩具において、そのモータに電力を供給する送電部10と電力を受電する受電部20を備え、非接触で電力送受電してなることを特徴とする。
また、モータMに電力を供給する送電コイルL1と送電回路を備えた送電部20と電力を受電する受電コイルL2と共振整流平滑回路である共振コンデンサと整流平滑回路とを備えた受電部20とを備え、送電コイルL1および受電コイルL2を回転軸部2に設け、非接触で電力送受電してなることを特徴とする。
(もっと読む)
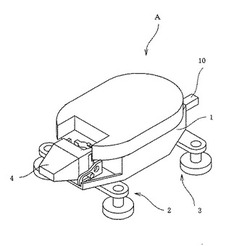
スピーカユニット及び音声出力ロボット装置
【課題】スピーカを保護し得る。
【解決手段】右側開閉部6(左側開閉部7)が右側回動部4(左側回動部5)に対して閉じたときに右スピーカ10(左スピーカ11)の右側磁石10B(左側磁石11B)の漏れ磁束に応じた磁力が作用する金属板20(21)を、この右側開閉部6(左側開閉部7)に対して設けるようにしたことにより、右側回動部4(左側回動部5)に対し右側開閉部6(左側開閉部7)が閉じた状態では、金属板20(21)による閉方向の付勢により、右側回動部4(左側回動部5)に対して右側開閉部6(左側開閉部7)が閉じた状態を維持することができ、かくして、右スピーカ10(左スピーカ11)を保護できる。
(もっと読む)
221 - 240 / 469
[ Back to top ]