
Fターム[2D129CA17]の内容
Fターム[2D129CA17]の下位に属するFターム
目標数値を入力するもの (22)
プログラムによる制御 (32)
Fターム[2D129CA17]に分類される特許
1 - 20 / 40
作業機の制御装置
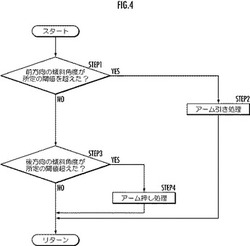
【課題】ブームやアームの長さに依存することなく、作業用アタッチメントを鉛直に昇降させることができる作業機の制御装置を提供する。
【解決手段】上部旋回体の前方において鉛直方向に対する掘削ロッドの傾斜角度が所定の閾値を超えた場合には、アクチュエータ駆動制御手段に基づいてアームを引く制御が実行される(ステップ1〜2)。また、上部旋回体の後方において鉛直方向に対する掘削ロッドの傾斜角度が所定の閾値を超えた場合には、アクチュエータ駆動制御手段に基づいてアームを押す制御が実行される(ステップ3〜4)。
(もっと読む)
削岩リグおよびその位置決め方法
海底地下探査掘削機

【課題】海底に着底して、小さい掘削機を用いて細いロッドで掘って、地底探査する為の機械を提供する。
【解決手段】大きなプラットホーム〔搾油リグ〕を建てて海上から、太いロッドで掘下げ、かつ掘削機は小さいものを使い、海底に潜水して掘る為に、ロッドのグリップ方法をブルドーザのキャタビラー形で掘削機に適用すると共に、海底で長期作業する為に海底の海水圧に耐え、燃料、酸素を補給が行えるようにしたデーゼルエンジン127を使用する。
(もっと読む)
ハンマーグラブ制御システム
【課題】ハンマーグラブの回転を制御すて、油圧配管チューブ等の捩じれ破損を防止するハンマーグラブ制御システムを提供する。
【解決手段】筒状基枠10に、地盤中に打ち込まれるケーシングCの中心部側から半径方向に進退移動可能で、ケーシングC内周面に圧接し筒状基枠10をケーシングCと一体化するプッシャー31を有するスタビライザー13を一体的に設け、スタビライザー13に一体的に連結する内軸体14aと回転可能に外嵌された外筒体14bとからなるスイベル機構14を有し、スイベル機構14の外筒体14bに吊り下げ接続部5を設けたハンマーグラブH1において、伝動機構を介してスイベル機構14の外筒体14bを回転駆動するモータ3と、ハンマーグラブH1の回転時に発生する外筒体14bの周方向のねじれ角を補正し、モータ3の回転を制御して外筒体14bをねじれ前の位置に復帰させるモータ制御装置4を有する。
(もっと読む)
可動機械用のテザー追跡システムおよび同方法
可動機械(12)用のテザー追跡システム(28)が開示される。テザー追跡システムは、可動機械に配置されて、可動機械が作業現場を移動して回るときに、可動機械から固定供給源(14)まで延びるテザー(16)を選択的に取り出し、巻き取るスプール(26)を有することができる。テザー追跡システムはまた、スプールパラメータを示す第1の信号を生成する、スプールに付属する少なくとも1つのセンサ(32)と、可動機械の位置を示す第2の信号を生成する、可動機械に付属する位置特定システム(33)と、少なくとも1つのセンサおよび位置特定システムと通信するコントローラ(34)とを有することができる。コントローラは、第1および第2の信号に基づいて、テザー回避ゾーン(24)を定めるように構成することができる。 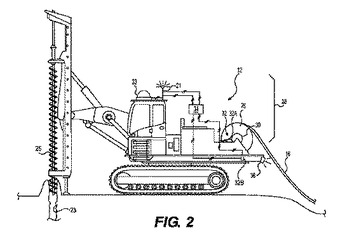 (もっと読む)
(もっと読む)
掘削装置
【課題】機構がシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供する。
【解決手段】ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
(もっと読む)
支柱又はパイルを設置する方法及び装置
支柱又はパイルを支持面に直立した状態で設置する方法において、設置しようとする支柱又はパイルを支持船から降下せしめて前記支持面と接触せしめる段階と、前記支柱又はパイルの下方又は足端をドリルとして用い、前記支柱又はパイルの回転により穴を前記支持面に形成し、前記穴の中に前記支柱又はパイルの下方部分を設置する段階と、穴あけ作業の完了の後に前記支持面に形成した前記穴の現場に前記支柱又はパイルを残しておく段階とを包含する。 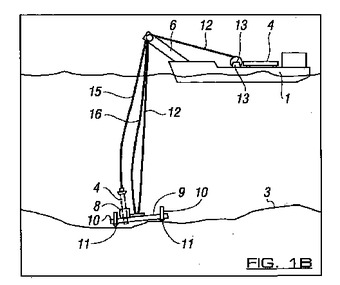 (もっと読む)
(もっと読む)
杭施工機
【課題】絞り込み機構を備える杭施工機において、絞り込み機構非作動時に掘削ロッドの貫入速度が速まったり、掘削ロッド引き抜時の速度が低下したりしても、絞り込み用索体が弛んで滑車から外れたり、周囲の部材に絡まったりせず、常に正常な作動を確保出来る方法の提供。
【解決手段】リーダに取り付けられたオーガマシン3とリーダー基部1aとの間に、滑車を介してワイヤー4Bが巻き掛けられ、これを絞り込む機構Sを具備する杭施工機Mにおいて、ウエイト7がワイヤー4Bの途中部分に昇降自在に吊持され、ウエイト7の高さを第一基準位置L1で検知するリミットスイッチ9Aと、ウインチドラム6Bの回転速度を制御する制御装置19とを備える。ウインチドラム6Bは、掘削ロッドの貫入時には、ウエイト7が基準位置L1まで下がった際に巻取り速度を速め、引き抜き時にはウエイト7が基準位置L1まで下がった際に巻出し速度を遅らす。
(もっと読む)
作業機械
【課題】敷鉄板を敷設した作業現場における作業機械の安定性を、接地板を敷鉄板に強く押し付けなくても十分に確保することができるジャッキ装置を備えた作業機械を提供する。
【解決手段】下部走行体12の上部に上部旋回体14を旋回可能に設け、上部旋回体14の前部にリーダ17を起伏可能に設けるとともに、上部旋回体12の前方に一対のフロントジャッキ装置20を、後方に一対のアウトリガジャッキ装置21をそれぞれ備え、敷鉄板上で作業を行う杭打機10において、フロントジャッキ装置20及びアウトリガジャッキ装置21の接地板20d,21dに電磁石22をそれぞれ取り付ける。
(もっと読む)
削岩リグにおける方法および装置
削岩リグ(1)に削岩機(6)が設けられ、削岩機は、衝撃装置(4)と、送り装置(9)と、削岩用ドリルビット(8)を端部に備えたツール(7)とを有する。衝撃装置は応力波をツールに対して発生し、ここからさらに、被掘削岩盤に対して発生するよう配設されている。掘削中、ツールに対して発生した圧縮応力波(σi)の少なくとも一部は、岩盤から反射されて応力波(σr)としてツールへ戻る。本方法では、岩盤から反射されてツールへ戻る応力波(σr)の運動量(Pr)を求め、衝撃装置の作動および/または送り装置の作動を運動量に基づいて調節する。 (もっと読む)
弁の不感領域判別方法
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁(8)の不感領域判別方法であって、制御弁(8)を電気的Pコントローラ(12)で制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器で測定することを含むものである。不感領域は、制御弁(8)のPコントローラと差分値との積によって判別する。 (もっと読む)
杭打機
【課題】杭打機本体の前部が浮き上がった状態でフリー降下機構を作動させたときでも、油圧モータが過回転状態になったり、負圧が発生したりすることを防止し、油圧モータを保護することができる杭打機を提供する。
【解決手段】リーダに上下動可能に設けたオーガ駆動装置を昇降させるためのオーガ昇降用油圧モータ18を駆動する昇降用油圧回路20aと、オーガ昇降用油圧モータを自由回転させてオーガ駆動装置をフリー降下させるためのフリー降下用油圧回路20bとを備えた杭打機において、前記フリー降下用油圧回路を作動させた状態で、前記オーガ駆動装置が上昇したときに前記オーガ昇降用油圧モータから作動油が流出するフリー降下回路49に、オーガ昇降用油圧モータからの作動油の流出を規制するためのチェック弁29を設ける。
(もっと読む)
杭打機
【課題】杭打機本体の前部が浮き上がった状態でフリー降下機構が作動状態になることを防止して油圧モータを保護することができる杭打機を提供する。
【解決手段】リーダに上下動可能に設けたオーガ駆動装置を昇降させるためのオーガ昇降用油圧モータ18を駆動する昇降用油圧回路20aと、オーガ昇降用油圧モータを自由回転させてオーガ駆動装置をフリー降下させるためのフリー降下用油圧回路20bと、オーガ駆動装置でオーガを回転駆動するための回転用油圧回路31とを備えた杭打機において、フリー降下用油圧回路を作動状態にするフリー降下用の電気回路に、回転用油圧回路を作動させる回転用電気回路が回転用油圧回路を作動状態にしたときにのみフリー降下用の電気回路を導通状態とする開閉回路(リレー回路)を設ける。
(もっと読む)
自律型掘削装置
【課題】従来の掘削装置の問題点を解決した新たな自律型掘削装置を提供する。
【解決手段】自律型掘削装置の本体下部101は、円柱と下端部の円錐とを組み合わせた形状であり、その外周には螺旋状のブレード102が右ねじ形状に設けられている。本体下部101の内部にはホイール103が設けられており、その軸104はベアリング105、106によって回転自在に支持されている。ホイール103の上部には、モータ108が本体下部101に固定して設けられ、その出力軸は軸104と同軸に接続されている。したがって、モータ108は、ホイール103を本体下部101に対して回転させることができる。
(もっと読む)
海底ドリルシステム及びドリルシステムの操縦方法
海底ドリルシステムは、水の中又は外で取外し可能且つ交換可能なツールカルーセルを有するドリルモジュールと、スキッドモジュールと、及び水の中又は外で前記スキッドモジュールと接続及び切断されるROVとを備え、該ROVは、前記海底ドリルシステムを作動するため用いられる。海底ドリルシステムを作動させる方法は、水の中又は外で、ツールカルーセルをドリルモジュールから取外して該ツールカルーセルを他のツールカルーセルに交換するステップを含む。ROVは、水の中又は外で、スキッドモジュールに接続され、前記スキッドモジュールから切断される。前記海底ドリルシステムは、前記ROVを用いて作動させられる。 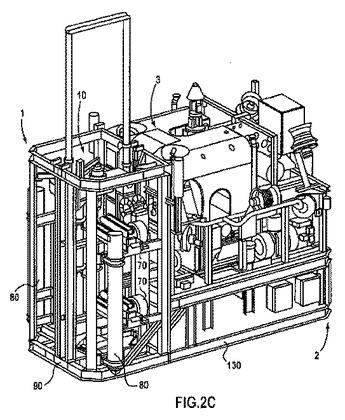 (もっと読む)
(もっと読む)
アースドリル
【課題】拡底バケットの拡大径の検出精度を向上させることができるアースドリルを提供すること。
【解決手段】アースドリル1の拡底バケットは、掘削翼に接続される油圧シリンダ23a,23bに油圧ホースh6,h7から油が供給されて拡縮動作を行う。その拡縮動作時に低圧側となる油圧ホースh6,h7に流れる油の流量に基づいて拡底バケットの拡大径を算出する。そのため、油圧ホースh6,h7に接続される油圧ホースh15、h16の内径が供給される油の圧力で拡大されることを防止すると共に、油圧ホースh6,h7に流れる油がロータリージョイント20の摺動隙間などから漏れ出す量を少なくすることができるので、油圧シリンダ23a,23bを伸縮するために実際に出入りした油量に対する第1検出流量Q1及び第2検出流量Q2の流量差を小さくすることができる。
(もっと読む)
杭打機
【課題】油圧回路上の圧力損失やリリーフ弁の特性による不具合を解消して、作動速度が異なっても引抜力を正確に制限することができる杭打機を提供する。
【解決手段】ウインチに設けた巻層検出器からの信号と、油圧モータに設けた一対の圧力検出手段で検出した圧力から差圧を計測してワイヤーロープの実負荷を求め、油圧ポンプからの作動油の圧力を制御する電磁比例リリーフ弁の設定値をオーガの引き抜き荷重制限値に対応して調整する。
(もっと読む)
掘削システム
掘削システムは、トラクターユニット10に連結された回転可能なドリルパイプ12と、トラクターユニット10に連結されるとともに、トラクターユニット10により移動可能な操縦可能掘削システム18,20,22と、を備えている。 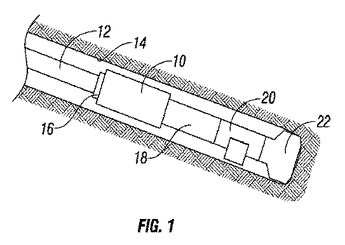 (もっと読む)
(もっと読む)
砕岩装置
【課題】新規で改良されたさく岩装置および砕岩装置を提供する。
【解決手段】移送体1に配設された第1の制御装置8とさく岩ドリル4に配設された第2の制御装置9とを含む。第1の制御装置8および第2の制御装置9は、第1データ通信リンク10よって互いに通信する。ドリル4は1つ以上のセンサ11、12、15を有し、その測定結果は第2の制御装置9で処理されて、そこで第1の制御装置8に転送されるだけである。第2の制御装置は、ドリル4の動作を制御するセンサ11、12、15および制御装置9を含む。
(もっと読む)
モジュラコネクタおよびその使用方法
第1モジュールと、第2モジュールと、これらの両モジュールを連結する1つ以上のコネクタとを有する地下地層に使用するモジュラツール。より詳しくは、第1モジュールは、ツールの外部の少なくとも一部を形成する第1カラーと、該カラーの第1端部の第1係合機構と、カラーの第2端部の第2係合機構とを有している。第1モジュールはまた、掘削流体を通す流体通路を有している。第2モジュールは、同様な構造を有する。1つ以上のコネクタは、ツールの外部に流体的に連結された少なくとも1つのフローラインと、モジュール間で電力及び/又はデータを伝送する電気的通路の連結を促進する。 (もっと読む)
1 - 20 / 40
[ Back to top ]