
Fターム[2D129CA18]の内容
Fターム[2D129CA18]に分類される特許
1 - 20 / 22
杭打機
【課題】地盤改良と鋼管埋設とを選択して効率よく確実に作業することができる杭打機を提供する。
【解決手段】地盤改良作業と鋼管埋設作業とを選択可能な杭打機において、作業開始時に地盤改良と鋼管埋設とのいずれか一方の作業内容を選択する作業選択手段と、該作業選択手段で選択した作業内容に対応した回転駆動装置の最大トルクを設定するトルク設定手段と、回転駆動装置のトルクを調整するトルク調整手段とを備え、該トルク調整手段は、該トルク調整手段の最大値が前記トルク設定手段で算出した最大トルクに設定される。
(もっと読む)
杭打機

【課題】回転駆動装置の形式、リーダの形式や長さ、施工部材の変更などにも容易に対応することができる制御手段を備えた杭打機を提供する。
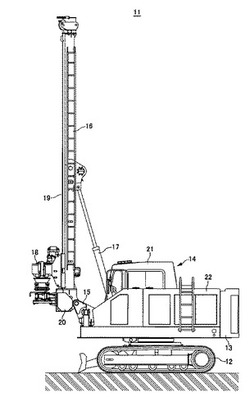
【解決手段】リーダ16に沿って昇降する回転駆動装置18によって施工部材を回転させながら地中に圧入する杭打機11において、リーダにおける回転駆動装置の昇降位置を検出する位置検出手段と、回転駆動装置の形式、リーダの形式及び長さ、施工部材の形式をあらかじめ設定する作業条件設定手段と、位置検出手段で検出した回転駆動装置の昇降位置、作業条件設定手段に設定された作業条件及び回転駆動装置に設けられた駆動源の形式に基づいて回転駆動装置から施工部材に与えるトルクの制限値を演算する制御手段とを備えている。
(もっと読む)
杭建込み施工管理装置およびプログラム
【課題】施工品質を向上させることのできる杭建込み施工管理装置およびプログラムを得る。
【解決手段】杭建込み施工管理装置30により、管理対象とする杭の少なくとも径および長さが含まれる杭仕様情報、および杭を建込む地盤の土質を示す土質情報を取得し、取得した杭仕様情報および土質情報に基づいて、掘削機20により、建込み孔を掘削により造成した後に当該建込み孔に杭を建込む施工を行う際の、施工時間の経過に伴う建込み孔の造成時の掘削ヘッドの先端位置および杭の建込み時の当該杭の先端位置の変化を示す施工サイクルタイム情報を導出し、杭建込み施工支援装置40により、施工サイクルタイム情報に基づいて、当該施工サイクルタイム情報により示される施工時間の経過を一方の軸とし、掘削ヘッドの先端位置および杭の先端位置を他方の軸としたグラフを示すグラフ情報を作成し、作成したグラフ情報により示されるグラフを表示する。
(もっと読む)
拡大翼を備えた掘削装置及び掘削方法
【課題】 拡大穴を掘削するときの掘削回数を自動的に設定する。
【解決手段】
下端に掘削刃6aと拡大翼7を備えた掘削ロッド5と、掘削ロッド5を駆動するオーガ駆動装置3と、前記掘削刃3aによる拡大穴掘削区域の掘削時における前記駆動手段の電動機4の負荷電流を測定する手段と、を有し、前記測定した電流値に基づき掘削刃6aの掘削力を求め、それに所定の低減率を付して拡大翼7による掘削力を算出し、前記拡大翼7の掘削力に基づき拡大穴の掘削回数を算出する。 前記掘削回数に基づき前記拡大翼7の拡開量を算出し、前記拡大翼7の拡開量に基づき前記拡大翼を拡開制御する。
(もっと読む)
削孔機
【課題】削孔に係わる作業精度と作業効率を簡便かつ安価な手法で改善する。
【解決手段】台車1とブーム4とガイドシェル5とドリフター6と削孔ロッド7を備えるドリルジャンボに、作業員による操作を案内するためのガイド手段を備える。ガイド手段は、削孔ロッドによる削孔角度および削孔距離を検知する検知手段と、予め設定した目標削孔角度および目標削孔距離を表示するとともに前記検知手段により検知した実際の削孔角度および削孔距離を併せて表示する表示手段としてのモニタを備える。検知手段は、台車とブームとガイドシェルとドリフターの位置およびそれらの姿勢を検出するセンサ13〜17と、各センサによる検出情報に基づいてその時点の削孔角度および削孔距離を演算し記憶する演算記憶手段としてのプログラマブルコントローラとにより構成される。
(もっと読む)
既製杭建込み施工管理装置
【課題】高精度な施工管理を容易にできる既製杭の建て込み工法における施工管理装置の提供。
【解決手段】実施工データ計測手段によって計測された実施工時計測データと所定の基本条件データとをコンピュータ29によるデータ処理によって比較し、実施工時計測データが各施工段階の基本条件データを満足することによって各施工段階の終了を判別できる表示を表示手段36,37に表示させるようにした。
(もっと読む)
杭打機
【課題】油圧回路上の圧力損失やリリーフ弁の特性による不具合を解消して、作動速度が異なっても引抜力を正確に制限することができる杭打機を提供する。
【解決手段】ウインチに設けた巻層検出器からの信号と、油圧モータに設けた一対の圧力検出手段で検出した圧力から差圧を計測してワイヤーロープの実負荷を求め、油圧ポンプからの作動油の圧力を制御する電磁比例リリーフ弁の設定値をオーガの引き抜き荷重制限値に対応して調整する。
(もっと読む)
液圧作動ブームの調整方法、装置およびコンピュータプログラム
本発明は、液圧作動ブームの動作を調整する方法および装置ならびにコンピュータプログラムに関するものであり、ブーム(1)は、液圧アクチュエータ(5a〜5b、7a〜7b)によって相対的に動くように連結された少なくとも2つの可動的相互連結ブーム部(1a、1b)と、液圧アクチュエータを制御する制御手段(13、14)と、ブーム部(1a、1b)間の位置を検出する検出器(15)とを含み、それにより、ブーム(1)の動作を調整するために、制御手段にある継ぎ手制御装置の、動きに固有の調整パラメータを個々の動きごとに設定することができる。本発明では、ブーム部(1a、1b)の相対的動きをブーム部(1a、1b)間の所定の位置に対してその両側において制御し、制御信号に応じて検出器(15)から取得した実際の位置および運動速度の値を理論上の位置および運動速度の値と比較し、これらの値の間の差に基づいて継ぎ手制御装置の調整パラメータを調整する。 (もっと読む)
削岩のための少なくとも一つの掘削パラメータを制御する方法及び装置
本発明は、削岩機を用いて岩盤を掘削する時の掘削パラメータを制御するための方法及び装置に関する。掘削中、衝撃手段を使用する衝撃発生装置が、岩盤に保持された工具に衝撃波を発生させる。前記衝撃発生装置は、支持手段に対して掘削方向に移動可能であり、衝撃波発生圧力の圧力レベルは、掘削作業中に制御される。前記掘削作業の掘削速度は、前記支持手段に対する衝撃発生装置の動きを決めることによって決められ、前期衝撃波発生圧力は、前記決められた掘削速度の関数として制御される。 (もっと読む)
杭穴掘削管理方法及び装置
【課題】掘削液(水)とセメントミルク(高温)の温度差を利用して、杭穴内にいずが吐出されているかを現場内に通報する。
【解決手段】掘削液(水)を第一液タンク16に、セメントミルクを第二液タンク17に収容する。共通搬送管20の一端21を掘削機1のジョイント4に、他端21aを切り替えバルブ23(第一液タンク16、第二液タンク17)に接続する。共通搬送管20の一端21側に温度センサー23を設置し、掘削機1と切り替えバルブ18の周辺に警報灯24を設置して掘削装置25とする(a)。切り替えバルブ23を第一液タンク16側に適宜開いて、掘削液を用いて杭穴32を掘削する(b)(c)。切り替えバルブ18を第二液タンク17側に開いて、セメントミルク35を吐出しながら掘削ロッド10を地上に引き上げれば(d)、温度センサー23によりセメントミルクが感知され警報灯24が点灯する。
(もっと読む)
被圧下における削孔装置
【課題】地下水位の変動を的確に把握してその変動を防止できるものとする。
【解決手段】地下水位以下の地盤に挿入された削孔ロッド10に削孔用の削孔液を送液する送液ポンプ20と、前記削孔液の排泥口12からの排泥を排出する排泥ポンプ21と、 前記排泥ポンプ21の排泥経路に設けた排泥圧力計23及び排泥開閉弁24と、圧力管理制御装置25とを備える。前記圧力管理制御装置25により、(1)排泥圧力計23からの圧力信号が所定圧力範囲未満のとき前記排泥ポンプ21の排泥能力を高める、(2)前記排泥圧力計23からの圧力信号が所定圧力範囲を超えるとき前記排泥ポンプ21の排泥能力を低下させ、所定の圧力範囲内にあるように圧力制御を行う。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及び建設機械におけるブーム位置決め制御方法
【課題】既存の削岩機搭載台車に対し穿孔位置決め制御機能を持たせる。
【解決手段】ドリルジャンボ1に三次元スキャナー9を設置するとともに、コンピュータ2を設置し、コンピュータ2に予め、前記削岩機13及び/又はガイドシェル12の形状、寸法データを登録しておき、三次元スキャナー9により三次元点群データを取得し、コンピュータ2によって三次元モデルを生成するとともに、該三次元モデルと、予めコンピュータ2に登録された前記削岩機13及び/又はガイドシェル12の形状、寸法データとのパターンマッチングを行い、削岩機13及び/又はガイドシェル12を特定し、削岩機13及び/又はガイドシェル12の位置及び方向を把握する。また、削岩機13及び/又はガイドシェル12について三次元点群データの欠損がある場合、予め登録されている削岩機13及び/又はガイドシェル12の形状、寸法データに基づき、該欠損部分を補完する。
(もっと読む)
油圧制御装置
【課題】油圧アクチュエータにかかる負荷に対応した適切なリリーフ圧に調整することが可能な油圧制御装置を提供すること。
【解決手段】タンク13内の作動油を送り出す油圧ポンプ11と、その油圧ポンプ11から供給される作動油によって駆動する油圧アクチュエータ10と、油圧ポンプ11によって油圧アクチュエータ10に供給される作動油の流れを制御する制御弁12と、作動油が流れる油圧回路の圧力を制御する電磁比例リリーフ弁15と、油圧アクチュエータ10を動作させる作動油の圧力を計測する一対の圧力計測器17,18と、その圧力計測器17,18によって計測された圧力値に基づいて電磁比例リリーフ弁15を調整するコントローラ20とを有する油圧制御装置1。
(もっと読む)
ロックドリル装置の運転制御方法およびロックドリル装置
ロックドリル装置(1)の運転制御方法およびロックドリル装置(1)。ロックドリル装置(1)のフラッシング媒体の流量(FLOW)を判定し、判定した流量(FLOW)に基づいてフラッシング媒体の圧力(p_FLOW)を調整することによりロックドリル装置(1)の運転を制御する。 (もっと読む)
油圧拡大ヘッド制御装置
【課題】作業員の技量や経験如何にかかわらず、拡大球根部造成用の拡大穴を適正且つ容易に形成する。
【解決手段】作業員Mが、拡大掘削回数設定器18により、拡大掘削回数をN回と設定する。すると、拡大翼拡大量制御部20は、N回目の拡大掘削における最大拡大量をαとした場合に、第1段階での拡大量が(1/N)・α、第2段階での拡大量が(2/N)・α、第3段階での拡大量が(3/N)・α、第N段階での拡大量が(N/N)・α(=α)となるように、各段階での拡大量を演算して制御信号を油圧ユニット14に出力する。油圧ユニット14は、この制御信号に基づき拡大翼の拡大量を制御する。
(もっと読む)
削岩装置用の適応ユーザインタフェース
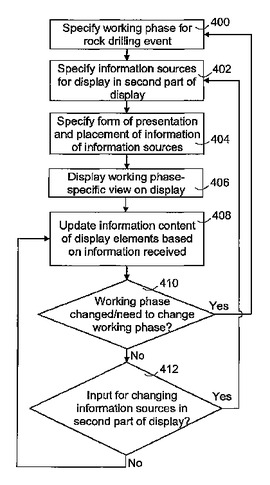
本発明は、削岩装置を用いて行われる多段階削岩作業を制御する制御装置に関する。削岩装置またはその制御ユニットのディスプレイでは、第1の部分が、実質的に一定の情報源用に設定でき、第2の部分が、削岩状況に応じて切り換えられる情報源用に設定できて、それに関連した情報が前記削岩状況時に表示される、少なくとも1つの情報源に関して、削岩状況を特定するように、定義が制御装置にセットされる。削岩作業の作業段階を照合し(400)、前記定義に基づいて前記段階に適した情報源を選択する(402)。削岩段階の実行中に、少なくとも1つの選択した情報源に関連した情報を前記表示部分に表示する(406)。
 (もっと読む)
(もっと読む)
さく孔機の操作指示装置
【課題】 複雑で高価な自動制御機器が不要で、必要に応じてオペレータが適切な判断とさく孔操作を行えるようにする。
【解決手段】 油圧クローラドリル1の打撃機構13、ダンパ17、回転機構9、及びフラッシング機構14の作動状況を検出する打撃圧力センサ31、ダンパ圧力センサ33、回転圧力センサ34、35、送り圧力センサ36、37、及びフラッシング圧力センサ38と、検出された作動状況の重要度を判断し、重要度に応じて段階的なオペレータへの操作案内情報をモニタ50、スピーカ52、外部表示灯53に出力するコンピュータ50とを備える。
(もっと読む)
掘削パラメータの制御装置及び方法
本発明は、削岩時の掘削パラメータを制御する方法及び装置に関する。本装置は、ドリル工具が一つ或いは複数のドリルストリング構成部材によって掘削機に接続可能であるように構成され、本装置は、削岩中ドリル工具を回転し、またドリル工具、一つ或いは複数のドリルストリング構成部材及び掘削機のグループから一つ或いは複数の間でジョイントを締め付けるための締め付けトルクを提供する手段を備えている。本装置は有効な締め付けトルクに基づいたドリル工具の回転速度を制御するように構成される。 (もっと読む)
バック・リーミング用自動制御システム
【課題】 「バック・リーミング」作業中のドローワークスの自動作業を行う制御システムを提供することにある。
【解決手段】 本発明の制御システムは、バック・リーミング作業中に或る吊上げ速度および吊上げトルクで掘管を移動させるホイストシステムを有する。オペレータ制御ユニットは、オペレータが少なくとも1つのバック・リーミングパラメータの所定値を入力することを可能にする。バック・リーミングパラメータセンサは、少なくとも1つのバック・リーミングパラメータの測定値を取得する。制御システムは、少なくとも1つのバック・リーミングパラメータをモニタする。ブレーキ組立体は、少なくとも1つのバック・リーミングパラメータの測定値と、少なくとも1つのバック・リーミングパラメータの所定値とが等しくなると、ドローワークスシステムの吊上げトルクに抵抗する。 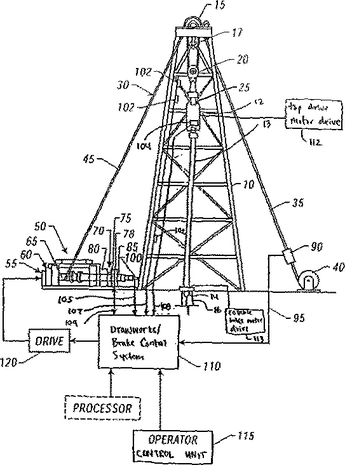 (もっと読む)
(もっと読む)
削孔装置の削孔位置管理方法
【課題】
絶対方位によらず基準方位に対する方位角度差のみで座標を算出して画一的に管理することができ、より高精度に削孔装置の位置を管理することができる削孔装置の削孔位置管理方法の提供
【解決手段】
削孔装置に連結され、チューンドドライジャイロ、加速度計及び回転角検知手段からの出力に基づいて傾斜角及び方位角を算出する算出手段とを有する方位傾斜角検知装置を使用し、傾斜角及び方位角と移動距離とに基づいて削孔装置の位置座標を算出する方法において、方位傾斜角検知装置を予め設定した現場座標系Y軸の軸方向に向けて配置し、その状態で方位傾斜角検知装置により現場座標系Y軸の方位を算出し、算出された現場座標系Y軸の方位を基準方位とし、その後、方位傾斜角検知装置を削孔装置に組み込んで削孔作業を行い、所定距離を削孔する毎に各測定位置における測定方位と基準方位との方位角度差を検出し、方位角度差に基づいて位置座標算出を行う。
(もっと読む)
1 - 20 / 22
[ Back to top ]