
Fターム[2F062HH13]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | フィーラ端子 (358) | 形状 (346) | 球 (188)
Fターム[2F062HH13]に分類される特許
61 - 80 / 188
微小焦点距離コリメーションに基づくマイクロキャビティ測定法および検出装置
本願発明は、1つのマイクロキャビティ測定法、および微小焦点距離コリメーションに基づく2種類の検出装置を含み、不規則なマイクロキャビティ、特に"サブマクロ"なマイクロキャビティの測定に使用することができる。本願発明においては、微小焦点距離を有する円筒レンズまたは球面レンズがファイバプローブと組み合わされて点光源の平行光結像光学システムを形成し、ファイバプローブの2次元または3次元の動きを超高感度で像の変化に変換する。本願発明は、微小測定力、高アスペクト比、および小型化の容易さ等の利点のみならず、高検出分解能、検出システムの単純な構造、および高速測定といった利点も有する。 (もっと読む)
接触子

【課題】シャフトの加工が容易で、しかも接触球に早期に摩耗や損傷を来す恐れのない接触子を提供すること。
【解決手段】シャフト20の先端部に形成した収容孔23に球面の一部を外部に露出させた状態で接触用の接触球30を転動可能に収容させるとともに、収容孔23の内底面と接触球30との間に支持用の支持球40を複数個介在させて成る接触子であって、収容孔23の奥側端部に手前側端部よりも内径の大きな収容部25を形成するとともに、収容孔23の内底面において少なくとも外周側に位置する部位にシャフト20の軸心に直交する連続した平坦面23aを形成し、複数の支持球40を収容部25の内周面25a及び平坦面23aに当接させた状態で収容孔23に接触球30を収容させた。
(もっと読む)
工作機械の接触検出装置およびスタイラスの先端接触子の製造方法
【課題】先端接触子の呼び半径とスタイラスの実際の移動距離とによって、ワークの寸法計測を正確に行うことができる接触検出装置およびスタイラスの先端接触子の製造方法を提供する。
【解決手段】スタイラス2の先端接触子21の実際の半径をRaとしたとき、先端接触子21の呼び半径Rnに対して、動作遅れ分として、先端接触子21がワーク110に接触した位置から可動接点11,12,13のいずれかが対応する鋼球31と32,33と34,35と36との接触から離れる位置までのスタイラス2の追加移動距離dを足したRa=Rn+dの大きさにする。これにより、先端接触子21がワーク110に接触してから追加移動距離dだけスタイラス2をワーク110側に移動させることができるので、スタイラス2の移動距離と先端接触子21の呼び半径とを足すと、実際の移動距離と同じにすることができ、誤差を解消できる。
(もっと読む)
表面形状計測装置、表面形状計測方法、露光装置及びデバイス製造方法
【課題】
被測定物の表面形状を簡便かつ高精度に計測可能な表面形状計測装置を提供する。
【解決手段】
表面形状計測装置は、ウエハ4に塗布されたレジスト5の表面に接触してこの表面の高さ変化に応じて位置が変化する複数の非光学的検出素子1を有する高さ検出器ABPと、非光学的検出素子1に向けて測定光10aを発する光源10と、非光学的検出素子1からの測定光10aの反射光を受光することにより非光学的検出素子1の位置を検出する光検出器9とを有し、高さ検出器ABPは、非光学的検出素子1を保持するための開口20が形成された保持部2を備え、非光学的検出素子1は、保持部2の開口20に固定されずに配列され、レジスト5の表面に接触することにより位置が変化する。
(もっと読む)
支持用部品の取付位置測定具および取付位置測定方法
【課題】支持用部品の取付誤差が大きいS/A部品が次工程に流出することを確実に防止するべく、現状の検査方法の変更を最低限に抑えつつ、支持用部品の取付位置を、容易に短時間で高精度に測定することができる支持用部品の取付位置測定具および取付位置測定方法を提供する。
【解決手段】揺動可能、かつ、その揺動方向が変更可能に支持されるリンク部材11とリンク部材11の変位量を検出する変位計6を備える測定具本体2と、ナット孔50aの位置を代替して示す測定孔3bが形成されるアタッチメント部材3と、からなり、さらにリンク部材11には、プローブ12および検出部13が固設され、プローブ12が測定面3cに当接するときの球面部12aの変位量を、球面部13aの任意の一軸方向に対する変位量として変位計6により測定し、測定面3cの位置を検出して、ナット孔50aの取付位置を検出する取付位置測定具1。
(もっと読む)
変位センサ、及び測定機
【課題】接触子に加えられる負荷の方向と、負荷の大きさと、変位センサにて検出される変位との関係を容易に調整することができる変位センサの提供。
【解決手段】変位センサ5は、対象物に接触する測定子2Aを先端部に有するスタイラス51と、スタイラス51を内部に収納する筒状のハウジング52と、スタイラス51、及びハウジング52の間に設けられ、スタイラス51を揺動自在に支持する2つの支持部材53とを備える。各支持部材53は、スタイラス51が取り付けられる取付部と、ハウジング52の内部に固定される固定部と、取付部、及び固定部を接続するバネ部とを備え、スタイラス51の軸方向に離間して配置されている。
(もっと読む)
三次元測定機
【課題】測定条件を変更した場合であってもプローブの移動量を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、一定の範囲内で移動可能に構成される測定子を有するプローブと、プローブを移動させる移動機構と、移動機構を制御する制御装置とを備える。制御装置は、移動機構の移動量、及びプローブの移動量に基づいて測定子の位置を算出する測定値算出部53を備える。測定値算出部53は、被測定物を測定するときの測定条件に基づいて、プローブの移動量を補正するための補正パラメータを算出する補正パラメータ算出部531と、補正パラメータに基づいて、プローブの移動量を補正する補正部532と、移動機構の移動量と、補正部532にて補正されたプローブの移動量とを合成することで測定子の位置を算出する移動量合成部533とを備える。
(もっと読む)
ロボットのツール位置検出方法、ロボットと対象物との相対位置検出方法、及びそれらの装置
【課題】ツール位置やロボットと対象物との相対位置を簡単かつ高精度に検出する。
【解決手段】ロボット2のアーム7先端のツール取付部7eに球面部8aを有するツール8を取り付け、ツール取付部7eから球面部8aの中心までのツールベクトルの成分に未知数を設定し、球面部8aを平板16に対してツール8の姿勢を変えて少なくとも未知数の数と同じ回数当接させ、その当接時のロボット2のアーム7の関節角度に基づいて当接時のツール取付部7eの位置をそれぞれ求め、特定の座標系において、平板16のZ位置と球面部8aの曲率半径Rcとの和から得られる球面部8aの中心のZ位置が、ツール取付部7eのZ位置とツールベクトルのZ成分との和から得られる球面部8aの中心のZ位置に等しいことを意味する連立方程式を少なくとも未知数の数と同じ回数連立させ、その連立方程式を解くことでツールベクトルの成分を求める。
(もっと読む)
表裏面測定プローブ、表裏面測定装置および表裏面測定方法
【課題】被測定物の表裏面形状にかかわらず、1つのプローブで被測定物の表裏面を高精度に測定できる表裏面測定プローブ、表裏面測定装置および表裏面測定方法を提供する。
【解決手段】プローブ本体10と、両端に接触子22,23を有する検出軸20と、この検出軸20をプローブ本体10に対して検出軸20の軸方向へ移動可能に支持するガイド機構30と、検出軸20を軸方向へ移動させる駆動機構40と、検出軸20と同軸上において、検出軸20の移動位置を検出する位置検出手段50とを備える表裏面測定プローブ。
(もっと読む)
ボールねじ用雌ねじ測定装置
【課題】
一度の計測操作によって、ねじ溝の内径のほか、ピッチ誤差やねじ溝の円筒度などを短時間で測定することのできる装置を得ようとする。
【解決手段】
被検査物たる雌ねじ部材を水平方向の軸線の回りを回転させる駆動部材と、測定子を支持して前記軸線に沿って移動可能な第1案内部材と、軸線と直交する方向へ移動可能な第2案内部材との2対の案内部材とを有し、前記第2案内部材に前記軸線と直交する方向へ付勢する付勢手段と、その付勢手段に抗して移動させる逆行手段とを付設するとともに、前記第1案内部材と第2案内部材とにそれらが移動する距離を計測可能な計測手段を設けたものである。
(もっと読む)
工作機械の接触検出装置
【課題】小型化できかつ信頼性を高めた工作機械の接触検出装置を提供する。
【解決手段】スタイラス2がワークに接触したことに応じて、可動接点保持部10により保持されている可動接点11,12,13のうちの少なくともいずれかを、対面する各対の鋼球31と32,33と34,35と36から離すことにより、電池6から抵抗素子25を介してトランジスタ26のベースに所定の電位を供給して、トランジスタ26を導通させ、発光ダイオード8を駆動することにより発光させて、ワークの接触を検知する。基板30にパターン電極40〜43を形成し、鋼球31〜36と、トランジスタ26と、抵抗素子25を基板30上に配置し、配線作業を簡略化する。
(もっと読む)
三次元測定機
【課題】プローブを交換した場合や、プローブの姿勢を変更した場合であっても測定値の誤差を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、プローブ21と、プローブ21を保持するとともに、プローブ21を測定空間内で移動させる移動機構22と、移動機構22を制御するホストコンピュータとを備える。ホストコンピュータは、移動機構22に基準のプローブを保持させたときの基準球231の中心位置から基点BまでのプローブベクトルV1、及び移動機構22にプローブ21Bを保持させたときの基準球231の中心位置から基点BまでのプローブベクトルV2を記憶する記憶部と、プローブベクトルV1、及びプローブベクトルV2に基づいて、基点Bの誤差を補正するための補正ベクトルCVを算出する補正ベクトル算出部と、補正ベクトルCVに基づいて、基点Bの誤差を補正する基点補正部とを備える。
(もっと読む)
三次元測定機
【課題】測定値の誤差を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機1は、測定子を有するプローブ21と、プローブ21を倣い移動させる移動機構22と、移動機構22を制御するホストコンピュータ5とを備える。ホストコンピュータ5は、移動機構22の移動量を取得する移動量取得部52と、測定値を算出する測定値算出部53とを備える。測定値算出部53は、測定子の位置の誤差を補正するための補正量を算出する補正量算出部と、移動機構22の移動量と、補正量とに基づいて測定子の位置の誤差を補正する補正部とを備える。補正量算出部は、プローブ21に設定された基準点におけるプローブ21の並進誤差を補正するための並進補正量と、基準点を回転中心とするプローブ21の回転角、及び基準点から測定子までのプローブ21の長さに基づくプローブ21の回転誤差を補正するための回転補正量とを算出する。
(もっと読む)
眼鏡枠測定装置
【課題】眼鏡枠測定装置において、接触子が受ける摺動抵抗の低減を図り、且つ、接触子の眼鏡枠に対する押圧力を安定させる。
【解決手段】接触子37の眼鏡枠の内周縁に当接する先端に回転可能な球状部材60が備えられ、この球状部材60が、眼鏡枠の形状測定時に内周縁に沿って回転することにより、接触子37と眼鏡枠との間の摺動抵抗を低減して、接触子37に生じる回転モーメントを軽減させるとともに、接触子37内部に備えられた圧力検出手段61が球状部材60にかかる圧力を検出し、この検出された圧力が一定圧力となるように、演算制御回路(52)(移動制御手段(64))が接触子37の移動を制御することにより、接触子37の眼鏡枠に対する接触子37の押圧力を安定させる。
(もっと読む)
ローラギャップ測定方法
【課題】ローラ間のギャップを高精度、かつ、効率よく測定し、測定時にローラ表面に損傷を与えることのないローラギャップ測定方法を提供する。
【解決手段】球形形状の測定子と測定子よりも小さな基準球を有するダイヤルゲージを用いて、2本のローラにより形成された隙間の測定を行うローラギャップ測定方法。
(もっと読む)
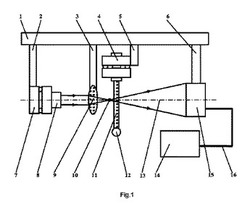
形状測定装置
【課題】光学素子の基準面測定と光学面測定を1つのプローブで測定する。
【解決手段】プローブハウジング4とプローブシャフト2の間に、プローブシャフト2の相対変位を測定するX1変位計6a、X2変位計6b等を設け、プローブシャフト2の並進変位と回転変位を測定する。また、プローブシャフト2に対して並進力と回転力を発生させるために、ヨーク3a、3b、磁性体3c、3dを有するX力発生機構、Y力発生機構を設ける。被測定物Wの光学面Waの測定は、Z変位計7の出力を用いて行い、基準面Wbの測定は、X1変位計6a、X2変位計6b等の出力を用いる。
(もっと読む)
ラベル検出装置
【課題】簡易にラベルの位置を検出することが可能なラベル検出装置を提供する。
【解決手段】ラベル貼付機100は、台紙310に間隔を空けて仮着される複数のラベル320を検出するものであって、台紙310とラベル320とからなるラベル用紙300が搬送される搬送路上に配置され、ラベル320の厚さ方向と略平行に延在するものであり、先端部分がラベル320と台紙310とに当接しつつ、延在方向に伸縮可能な接触式変位センサ106と、接触式変位センサ106の伸縮量に基づいて、ラベル320の位置を検出する制御部102内の位置検出機能104とを有する。
(もっと読む)
倣い測定装置
【課題】本発明の目的は、自律倣い測定の高精度化と高速化との両立を実現することのできる倣い測定装置を提供することにある。
【解決手段】倣いプローブ12による自律倣い測定中、倣いプローブ12の現在のチップ中心位置に対し過去のチップ中心位置の軌跡情報を保持している軌跡情報保持手段40と、該軌跡の近似直線方向を軌跡基準方向とする軌跡基準方向決定手段42と、該方向を進行方向に決定する進行方向決定手段44と、該進行方向に沿って倣いプローブ12が移動するように移動手段32を制御する移動制御手段46と、該進行方向に基づき被測定面30の法線方向を求める法線方向決定手段48と、を備えたことを特徴とする倣い測定装置10。
(もっと読む)
電動式座標測定装置
座標測定装置(10)はハウジング(12)を有し、ハウジングは台(11)上に回転可能に支持され、水平方向並進アーム(15)と係合するキャリッジ(14)を乗せる垂直ピラー(13)が取付けられている。アームの各端のタレット(18、19)が、プローブ(22、23)に接続された回転体(20、21)を収容する。台の回転、キャリッジの垂直運動、アームの水平運動、及びプローブの回転が、ハウジング内のモータ(27、28、29、30)によって駆動される。モータの回転は、ケーブル及びプーリ組立体によってアームとキャリッジに伝達される。アームの横方向動作を制御するケーブル(43)は、キャリッジがピラーに沿って上下に移動する際にケーブルの一定長さ及び張力を維持するために、両端がアーム両端に位置する先端(16、17)に取り付けられ、キャリッジ上側及び下側に位置するピラーの部分に沿って上方及び下方に延在する。プローブを測定表面に対し一定角度で維持するようプローブの回転と基部の回転が協調される。 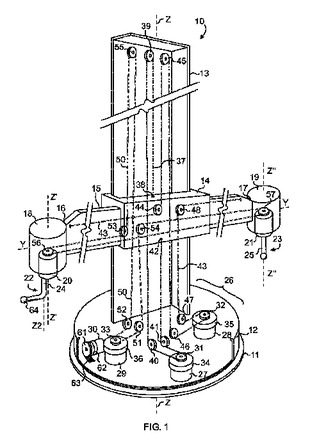 (もっと読む)
(もっと読む)
形状測定方法
【課題】レンズの外形基準に対するレンズの光軸の傾き、偏心量の要望精度に対応できる
形状測定方法を提供する。
【解決手段】被測定物としてのレンズ4を3個の球状部3a,3b,3cを有する治具3に同軸状に設置し、測定機XY平面に対して中心軸wを所定の傾斜角度で傾斜させて中心軸wまわりに所定角度ずつ回転させ、各回転位置で、球状部3a,3b,3cとレンズ4の円筒面4aおよびその片側の面4a1,4bとをプローブ1により所定経路で走査してデータを取得し、各回転位置での球状部3a,3b,3cの中心位置座標値をデータより算出し、最小二乗法でフィッティングさせることにより、全回転位置でのレンズ4の測定データ群を球状部基準で中心軸wまわりの全周にわたって分布し、測定面の形状を求める。
(もっと読む)
61 - 80 / 188
[ Back to top ]