
Fターム[2F062HH13]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | フィーラ端子 (358) | 形状 (346) | 球 (188)
Fターム[2F062HH13]に分類される特許
41 - 60 / 188
機上計測装置のプローブ取り付け位置算出方法
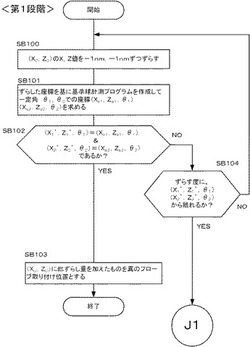
【課題】回転軸を用いた機上計測において、各種演算により算出された機上計測装置の取り付けられた回転軸の回転中心軸とプローブの先端との距離を基準球計測の結果を基に補正を行う機上計測装置のプローブ取り付け位置算出方法を提供する。
【解決手段】基準球を計測することにより、算出したプローブ取り付け位置(X0,Z0)の精度を向上させる準備段階において、(X0,Z0)のX,Z値を各々―1nmずつずらし、ずらした座標を基に基準球計測プログラムを作成して一定角θ1,θ2での座標を求め所定の条件内であるか否か判断し、条件を満たす場合には、(X0,Z0)に総ずらし量を加えたものを真のプローブ取り付け位置とし、処理を終了し、条件を満たさない場合には、ずらす度に一定角θ1,θ2での座標から離れるか否か判断し、離れない場合には準備段階の最初へ移行し、離れる場合には異なる方向へずらす第2の準備段階へ移行する。
(もっと読む)
微小表面形状測定プローブ

【課題】プローブと被測定物との接触圧を従来よりもさらに微小に調整できる微小表面形状測定プローブを提供する。
【解決手段】微小表面形状測定プローブは、被測定物1と接触する接触子を2先端に有するプローブシャフトと、プローブシャフトに与える付勢力に対する反力が作用するようにプローブ本体に組み込まれた圧電センサと、圧電センサに作用する荷重を測定する荷重検出部と、荷重検出部により検出された荷重に基づいて、付勢装置による付勢力を調整する制御部と、接触子2を通して被測定物1との接触点へレーザ光を照射し、接触点で反射されたレーザ光を検出することで、接触子2と被測定物1との接触を感知する接触感知装置と、を備える。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 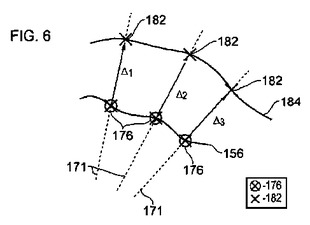 (もっと読む)
(もっと読む)
厚さ連続測定器、厚さ連続測定装置及び厚さ連続測定方法
【課題】 厚さ1mm以下の長尺シートの厚さを連続的に測定する。
【解決手段】 装置基体10と、上下方向に揺動自在に前記基体10に取付けられた回転自在の上部球26と、上部球26の上方に取付けられ前記上部球26の上下揺動に連動して上下揺動するレーザー光反射体16と、前記レーザー光反射体16の上方において装置基体10に固定されたレーザー厚さ測定器14とからなる上部球支持装置6と、前記上部球支持装置6の上部球26と対向して上部球26の下方に回転自在に下部球32を配設してなる下部球支持装置8とからなる連続走行シートの厚さ連続測定器。
(もっと読む)
仮想表面によって測定過程を制御する方法
本発明は、測定対象(12)を計測する座標測定機(46)の測定過程を制御する方法(10)であって、前記座標測定機(46)が制御装置(64)と探触ピン(18)を備えたプローブ(60)とを有し、前記探触ピン(18)と前記測定対象(12)の表面(14)との間の相対運動が前記制御装置(64)によって制御されるものに関する。さらに、前記表面(14)は測定対象表面(13)に一致した少なくとも1つの実際部分(24)と少なくとも1つの仮想部分(26)とを有する。本発明はさらに、当該座標測定機とコンピュータプログラムとに関する。
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。 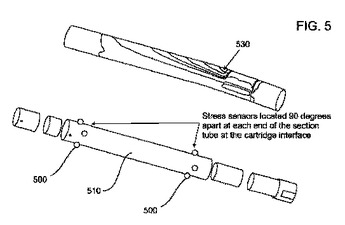 (もっと読む)
(もっと読む)
照明付きプローブ端を有する座標測定機および動作方法
可搬型の関節アーム座標測定機(AACMM)が、提供される。AACMM(100)は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム(104)を含む。アーム(104)は、複数の接続されたアームセグメント(106、108)を含み、アームセグメント(106、108)のそれぞれは、位置信号を生成するための少なくとも1つの位置トランスデューサを含む。測定デバイス(118)が、AACMM(100)の第1の端部に装着される。トランスデューサからの位置信号を受信するための、および測定デバイス(118)の位置に対応するデータを提供するための電子回路(210)が、設けられる。光源(402)が、アーム(104)に結合され、測定デバイス(118)の近くに光を放射するように配置される。 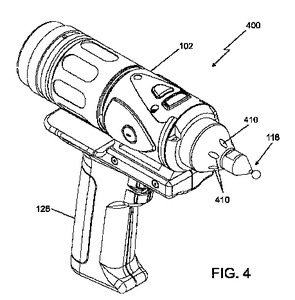 (もっと読む)
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 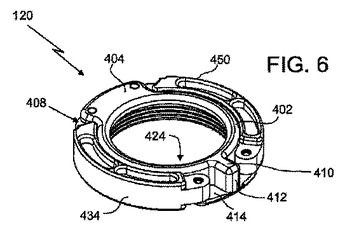 (もっと読む)
(もっと読む)
座標測定デバイス
可搬型の座標測定デバイスが、提供される。座標測定デバイスは、少なくとも1つのアームを含む。一端に磁気部材を含むブラケットが、アームに結合される。プローブが、アームの一端に回転可能なように結合され、プローブは、第1の側面に第1の鉄部材を含み、プローブは、第1の位置と第2の位置の間を動くことができ、鉄部材は、第2の位置にあるときに磁石に近接する。 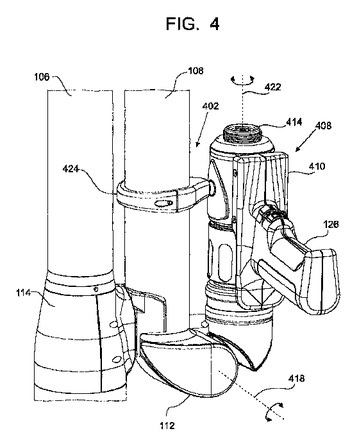 (もっと読む)
(もっと読む)
変位測定装置
【課題】第2被測定部の変位が時間軸に対して急激に変化するような場合であっても第1被測定部に対する第2被測定部の相対変位を正確に測定することが可能な変位測定装置を提供する。
【解決手段】外軸(第1被測定部)11に固定されるセンサ本体部31と、このセンサ本体部31に対して出退可能な触針部32と、この触針部32を内軸(第2被測定部)12に従動させる従動手段とを備え、センサ本体部31に対する触針部32の出退量を検出することにより外軸11に対する内軸12の相対的な変位を測定する変位測定装置で、触針部32をセンサ本体部31に対して弾性付勢することなく出退自在に保持し、内軸12側に設けられた磁石(保持部)35に、触針部32側に設けられた鉄製の接触子(被保持部)42を吸着させることにより触針部32を内軸12に従動させるように構成する。
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
座標測定機に使用するための測定プローブ
【課題】より正確な測定を可能にする新規な測定プローブを得ること。
【解決手段】座標測定機に使用するための測定プローブが、座標測定機に接続された基部1、測定チップ4、および測定チップ4の第1の端部に配置された球5を有している。測定チップ4は、基部1によって支持される少なくとも3つのリジッドな支持体2を用いてその第2の端部で支持され、それにより支持体2が球形の接続部によって測定チップに接続され、支持体2をその長さ方向に沿って基部1に対して移動させることが可能になる。支持体2は、程度にかかわらず基部1の測定チップ・ホルダ3と反対の側に突出することによって基部1を貫通すること、およびその長さ方向に沿って移動させることができるように配置されている。
(もっと読む)
形状測定装置
【課題】測定対象点に測定子を確実に接触させて被測定物の形状を測定することができる形状測定装置の提供。
【解決手段】三次元測定機1は、被測定物を測定するための球状の測定子を有するプローブ21と、プローブ21を保持するとともに、プローブ21を移動させる移動機構22と、移動機構22を制御するモーションコントローラ3とを備える。モーションコントローラ3は、測定子の中心位置と、測定子の半径と、測定子の振れ量とに基づいて、被測定物の表面と、測定子との接触点の位置を算出して取得する接触点取得部33と、接触点取得部33にて取得される接触点の位置に基づいて、移動機構22にてプローブ21を移動させるための位置指令値を算出する移動指令部31とを備える。
(もっと読む)
形状測定方法及び形状測定装置
【課題】段差が形成されている被測定面の面形状を安定して高精度に測定し、測定時間を短縮すること。
【解決手段】ステップS101では、被測定面に対して第1プローブを走査させ、第1プローブの3次元位置データを含む測定データを取得する。ステップS102では、ステップS101で得られた測定データに基づき、被測定面の段差位置を示す段差位置データを演算により求める。ステップS103では、第1プローブよりも高分解能で測定可能な第2プローブの走査条件を、ステップS102で得られた段差位置データに基づき、被測定面の位置に対応して決定する。ステップS104では、被測定面に対して第2プローブをステップS103で決定した走査条件で走査させ、第2プローブの3次元位置データを含む測定データを取得する。ステップS105では、ステップS104で得られた測定データに基づき、被測定面の面形状を示す面形状データを演算により求める。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
アライメント調整機構、および測定装置
【課題】測定子の位置を一定に維持しつつ、プローブのアライメント調整が可能なアライメント調整機構、および測定装置を提供する。
【解決手段】アライメント調整機構10は、X軸方向に沿って平行な第一、第二調整端辺を有する調整板40と、調整板40に設けられるプローブ固定部60と、プローブ固定部60に固定されるプローブ8と、Y軸方向の移動が規制されるとともに、X軸方向に沿って平行な第一、第二基部端辺を有する補強板30と、調整板40をY軸方向に押圧するY方向調整ネジ70と、第一調整端辺および第一基部端辺、第二調整端辺および第二基部端辺を連結する調整連結部521と、を具備し、プローブ8の測定子8Cは、初期状態で、第一調整端辺および第一基部端辺を含む第一傾斜面、および第二調整端辺および第二基部端辺を含む第二傾斜面の交線上に配置される。
(もっと読む)
内側測定器
【課題】小型化および測定範囲の拡大が可能で、しかも、高精度な内側測定器を提供する。
【解決手段】本体ケース1と、固定子10と、測定子20とを有する内側測定器において、本体ケース1内に中間部を支点として揺動可能に設けられ一端が測定子20に当接される接触部35を有し他端に歯車部36を有するセクターギヤ30と、このセクターギヤの接触部が測定子に常時接する方向へセクターギヤを付勢する付勢手段40と、セクターギヤの歯車部に噛合し本体ケース内に回転可能に支持されたピニオン50と、このピニオンの回転量を検出するロータリセンサ60とを備える、
(もっと読む)
画像プローブの校正方法および形状測定機
【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
スタイラスの成形方法、スタイラス、及び形状測定機
【課題】先端球をステムと同一の材料で短時間で効率よく一体成形することで、スタイラスを高い信頼性で成形可能とする。
【解決手段】棒状のステム104と該ステム104の先端に設けられた先端球106とを備えて接触式計測用プローブに用いられるスタイラス100の成形方法において、前記ステム104を位置決めする工程と、該位置決めされたステム104の先端部分にレーザ光128を照射する工程と、該レーザ光128を照射して該ステム104の先端部分を溶融後、表面張力により該溶融部分を前記先端球106として成形して固化するまで放置する工程と、を含む。
(もっと読む)
41 - 60 / 188
[ Back to top ]