
Fターム[2F063AA02]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定内容 (2,719) | 位置、座標、変位、移動量 (976) | 1次元の (585)
Fターム[2F063AA02]に分類される特許
121 - 140 / 585
ホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法

【課題】本発明の課題は、ガントリーステージ直交性誤差に関連する問題を解決することである。
【解決手段】本発明によるホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法は、直交性に構造的に一致するガントリーステージの現在位置のエンコーダ値を解読して記憶する工程と、ガントリーステージを低速で駆動している状態で、ガントリーステージのマスター軸およびスレーブ軸上にそれぞれ設定されたホーミング処理用のセンサまたはエンコーダのインデックス信号をモニタする工程と、インデックス信号が検出された場合、認知された位置のマスター軸またはスレーブ軸のリニアエンコーダ値を解読する工程とを備えていることを特徴とする。
(もっと読む)
位置検出装置

【課題】磁石及び磁気センサの特性のバラツキや組立精度の影響を抑えながら、回路規模が小さく、低消費電流による駆動を実現する。
【解決手段】位置検出装置は、2個の磁気センサ11a,11bが互いに離間されて配置される少なくとも1つの磁気センサ対と、磁気センサ対に対して移動自在又は傾斜自在に配設される磁石10と、各磁気センサ11a,11bの出力電圧を電流に変換するV/I変換回路12と、V/I変換回路12が変換した各電流I1,I2を基に、差電流(I1−I2)を生成する減算回路13と、V/I変換回路12が変換した各電流I1,I2を基に、和電流(I1+I2)を生成する加算回路14と、差電流(I1−I2)を和電流(I1+I2)で除算する電流除算回路15と、電流除算回路15が除算して得た値を位置信号Voとして出力する出力回路16と、を備える。
(もっと読む)
振動型駆動装置
【課題】移動体の位置を検出でき、配線が簡単で断線し難い振動型駆動装置を提供する。
【解決手段】振動型駆動装置1は、印加された電圧に応じて機械的変位を生じる電気機械変換素子3と、電気機械変換素子3によって軸方向に移動可能に支持され、表面に、電気機械変換素子3の外部電極6に片側が接続された軸方向に延伸する2つの抵抗体8を備える駆動軸4と、駆動軸4に摺動可能に係合し、2つの抵抗体8に接触し、抵抗体8の接触した点を電気的に接続する移動体5と、電気機械変換素子3に周期的な駆動電圧を印加する駆動回路と、外部電極6間の電気抵抗を検出する検出回路とを有する。
(もっと読む)
非接触動作検出装置
【課題】人との距離を高精度に求めることが可能な非接触動作検出装置を提供する。
【解決手段】本発明の一実施形態に係る非接触動作検出装置1は、人の動作に起因して生じる電気信号を非接触で検出する電極部10a〜10lと、電極部10a〜10lによって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部25とを備える。人の動作に起因して生じる電気信号は、足が離地する際に大きくなるパルス状をなしており、その周期は人の動作速度を示すこととなる。したがって、電気信号の振幅に加えて、電気信号の周期に基づいて人との距離を求めることによって、人の動作速度が変動して検出電気信号の振幅が変動しても、人との距離を高精度に求めることができる。
(もっと読む)
位置検出センサ
【課題】検出素子数を増やさずに出力の高分解能化を図る。
【解決手段】位置検出センサ1は、実装ヘッドH1〜H15と、仮想出力算出部11と、最端検出素子決定部12と、検出信号生成部13とを備える。実装ヘッドH1〜H15は、ガイドテープGTの幅方向に所定の間隔をあけて配置され、ガイドテープGTの磁束を検出する。仮想出力算出部11は、実装ヘッドH1〜H15の出力結果に基づいて、隣り合う実装ヘッド間に配置される仮想ヘッドの出力を補間により算出する。最端検出素子決定部12は、各実装ヘッドH1〜H15及び各仮想ヘッドのうち、出力が所定の閾値以上であって最端に位置する最端検出素子を決定する。検出信号生成部13は、最端検出素子の位置に基づいてガイドテープGTの位置情報を示す位置検出信号を生成する。
(もっと読む)
位置検出装置及びシフト装置
【課題】磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供する。
【解決手段】シフトレバーに連動して直線的に変位する磁石14は、その変位方向に対して交わる方向に2極着磁された第1の磁極部31と、当該変位方向に沿って多極着磁された第2の磁極部32とを備える。また、第1の磁極部31に対応する複数個の磁界方向検出型の磁気センサ、及び第2の磁極部32に対応する複数個の単極検出型の磁気センサも備える。磁界方向検出型の磁気センサは磁石14の変位に伴う磁界方向の変化に応じた、また単極検出型の磁気センサは対応する磁極の極性に応じた二値信号をそれぞれ生成する。各磁気センサにおいて生成される二値信号の組み合わせは、ハミング符号に準拠する。
(もっと読む)
静電容量センサ及びそれを用いた車両用近接センサ
【課題】検出電極からの発生するノイズによる他の電子機器の影響を抑制することができる静電容量センサ及びそれを用いた車両用近接センサを提供する。
【解決手段】本静電容量センサ1は、人体が近接又は接触する導電体であり、且つ静電容量を充電する充電信号が繰り返し供給される複数の検出電極3a…と、各検出電極に対して、他の各検出電極と異なる時刻に充電信号を供給する充放電手段5と、各検出電極の静電容量の変化を検出する容量検出手段22と、容量検出手段の結果を基に人体の近接又は接触の判定を行う近接判定手段24と、を備え、各検出電極から放射される高周波ノイズが平均化されていることを特徴とする。これにより、複数の検出電極に同時に充電信号を供給させずに、充電信号が重複する期間を減少させることによって、充電信号により検出電極から生じる高周波ノイズの強度変動をより低減させて平均化させることができる。
(もっと読む)
多周期的絶対位置検出器
本発明は、少なくとも1つの永久磁石を含む磁気位置検出器に関する。また本発明は、トーションバーにより連結された第1のシャフトと第2のシャフトとの間のトルクを検出する磁気装置に関する。本発明の目的は磁化ユニットの多周期的絶対位置を決定する装置を提供することである。従って本発明の主題は、少なくとも磁化ユニット(1)と、第1の磁気感受性プローブ(2)と、第2の磁気感受性プローブ(3)とを含む磁気位置検出器(A)である。第2の磁気感受性プローブ(3)は、この第2の磁気感受性プローブ(3)が作動しているか否かに関係なく磁石(1)の位置に関連する第2のデータを決定するために、絶対的、漸増的、かつ反転可能な方法で、磁場の完全な回転の回数を測定できる。検出器は、第1および第2のプローブ(2、3)にそれぞれ由来する第1および第2のデータに基づいて磁石(1)の絶対位置を計算するモジュールをさらに含む。 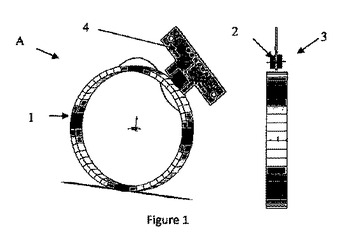 (もっと読む)
(もっと読む)
原点検出装置
【課題】 特に、固定磁性層及びフリー磁性層を有する磁気抵抗効果素子を用いて、従来に比べて高精度に原点検出を行えるようにした原点検出装置を提供することを目的としている。
【解決手段】 磁石1の中心1cが原点Pにあるとき、各磁気抵抗効果素子のフリー磁性層には水平磁場成分H1が作用するためフリー磁性層をその水平磁場方向に向かせることができ、磁化を安定化でき、ヒステリシスを十分に小さくでき、高精度な原点検出を行うことができる。そして前記磁石1の中心1cが、原点Pに位置したとき、差動出力がゼロになり、それ以外の時には差動出力が生じているため、差動出力の有無の判断により、原点検出を行うことができ、基準電圧設定回路が必要でない等、簡単な回路構成で、高精度な原点検出を行うことが可能である。
(もっと読む)
センサ装置並びに入力装置、遊技球発射装置
【課題】直線的に変位する検出対象物体の動作パターンに関わらず当該検出対象物体の位置検出が可能なセンサ装置を提供する。
【解決手段】センサ装置は、巻軸方向が所定の直線方向となるように配置される検出コイル21と、検出コイル21の筒内への挿入量が変化するように検出対象物体の変位に応じて上記巻軸方向に移動自在に配置される導電性筒体31と、導電性筒体31の変位に応じた検出コイル21のインダクタンス変化に基づいて検出対象物体の変位に比例した位置信号を出力する制御基板4とを備えている。
(もっと読む)
吊られた金属帯の振動の減衰および形状の制御のための方法およびシステム
本発明によれば、吊られた金属帯の振動の減衰および形状の制御のための方法が提供される。この方法は、複数の非接触のセンサ3によって金属帯1までの距離を測定して、距離測定値を供給するステップと、距離測定値にもとづいて偏向プロファイルを生成するステップと、偏向プロファイルを幾つかの基本形状I、II、III、IV、Vへと分解するステップと、複数の非接触のアクチュエータm12a、m22a、・・・、mi2a、・・・、mn2a、およびm12a’、m22a’、・・・、mi2a’、・・・、mi2a’によって偏向プロファイルを制御するステップとを含んでおり、制御するステップが、基本形状I、II、III、IV、Vの各々について、対応する力プロファイルの組合せを供給するステップを含んでいる。  (もっと読む)
(もっと読む)
静電容量センサの電極構造及びそれを用いた車両用近接センサ
【課題】人体が近接又は接触する電極部から周囲へ放射される高周波ノイズを低減させることができる静電容量センサの電極構造、及びそれを用いた車両用近接センサを提供する。
【解決手段】本静電容量センサの電極構造は、人体が近接又は接触する導電体であり、未知の静電容量Cxを充電する充電信号が繰返し供給される検出電極3と、検出電極3に近接して配設される導電体である反転電極4と、充電信号の電圧の変化と逆向きに電圧が変化する反転信号を反転電極4に供給する位相反転回路6と、を備え、検出電極から放射される高周波ノイズ(イ)を反転電極によって低減する。長尺板状又は棒状の検出電極3と、検出電極と略同一の長さの反転電極4を平行に配設することができ、位相反転回路6はインバータ回路によって構成することができる。
(もっと読む)
ストロークセンサ
【課題】センサコイルの故障時にも誤ったシフトレンジが検出されることを防止できるストロークセンサを提供する。
【解決手段】被検知体50の導体片51〜57は、スライダ41の下面に所定のパターンで2次元配置されている。具体的には、スライダ41の下面はY方向において各検知部61〜64にそれぞれ対応する4つの領域に区分され、各導体片51〜57は、各領域におけるX方向の所定の範囲にそれぞれ配置される。ここで、導体片51〜57の配置は、X方向において、シフトレンジごとに検知部60にて検知される導体片51〜57の組み合わせが異なるように設定される。しかして、シフトレンジが切り替わる度に、導体片51〜57を検知する検知部61〜64の組み合わせが変化し、検知状態となった検知部61〜64の組み合わせからシフトレンジを特定できる。
(もっと読む)
磁気式近接センサ
【課題】検出対象と検出部の距離が遠い場合でも、検出対象と検出部のギャップが変動する場合でも検出対象と検出部の近接を高精度に検出する。
【解決手段】磁界発生部2は、検出部1と磁界発生部2とが相対的に移動する方向に並設され、それぞれの磁化方向が略平行で互いに反対方向を向くように配置された一対の磁石202a、202bからなり、一対の磁石202a、202bのそれぞれを通り、磁気センサ101が検出する磁界の方向が反転する一対の磁界反転面203a、203bを形成する磁界を発生し、磁気センサ101は移動する際に磁界反転面203a、203bの少なくとも一方を横切るものであり、判定部3は磁気センサ101の検出信号の出力レベルが磁界反転面203a、203bを検出するための基準信号のレベルより大きいときに所定レベルの近接検出信号を出力するコンパレータ301を備えた。
(もっと読む)
近接検出装置
【目的】 複数の磁気センサを用いず、接続部材の回転により生じる誤検出を防止する近接検出装置を提供する。
【構成】 中継パイプ20がガス栓10に接続された状態で周方向に300度回転可能であり且つソケット30がパイプ20に接続されたか否かを検出する近接検出装置であって、ソケット30に設けられ且つソケット30がパイプ20に接続された接続状態でパイプ20の回転と共に旋回可能なマグネット500と、栓10に設けられ且つ前記接続状態でN極510に対向する内側ヨーク200aと、栓10に設けられ且つ前記接続状態でS極520に対向する外側ヨーク200bと、ヨーク200a、200bの間に配置される磁気センサ300とを備える。N極510が旋回の内側、S極520が旋回の外側に向いている。ヨーク200a、200bがN極510、S極520の旋回経路と略同じ円弧状である。
(もっと読む)
移動体システム
【課題】 連続区間か離散区間かを簡単に識別する。
【構成】 移動体に、複数のコイルを移動体の移動方向に沿って配列したコイルアレイを有する検出ヘッドを設ける。コイルアレイの両側方にダミーコイルを設けて、ダミーコイル間の出力差により、磁気マークを一定の第1のピッチで配置した連続区間か、磁気マークを第1のピッチよりも長い間隔で配置した離散区間かを識別する。
(もっと読む)
シリンダのストロークセンサ
【課題】シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを提供すること。
【解決手段】
シリンダ10本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30と、を備えるシリンダ10のストロークセンサ100であって、ピストンロッド30は、ストロークに伴って円周上の位置が異なるように軸方向に形成される磁気スケール60を備え、シリンダチューブ20は、ピストンロッド30の周囲を囲むように略等間隔で設けられ磁気スケール60を検出可能な複数のMR素子50a〜50fを同一円周上に備える。
(もっと読む)
ガスタービン制御装置
【課題】ガスタービン制御装置の保守性の向上を図る。
【解決手段】ガスタービン制御装置は、バルブの開度に連動する可動鉄芯と、可動鉄芯の周囲に配置される1次コイル32と、1次コイル32に対応して設けられる2つの2次コイルと、を有する差動トランスより、1次コイル32及び2つの2次コイルに対する可動鉄芯の位置が変化する場合に、電源から1次コイル32に加えられる励磁電圧の電圧値及び励磁電圧によって2つの2次コイルに生じる誘起電圧の電圧値が入力される入力部と、2つの2次コイルのそれぞれの誘起電圧から求められた誘起電圧の電圧値の差を励磁電圧の電圧値で除して、可動鉄芯の位置を示す情報を演算する位置演算部38と、演算された可動鉄芯の位置に基づいて、バルブの開度を求め、バルブの開度を指示する開度指示値を、バルブの開度を制御する開度制御部に出力する出力部と、を備える。
(もっと読む)
シリンダのストロークセンサ
【課題】シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを提供すること。
【解決手段】
シリンダ10本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30と、を備えるシリンダ10のストロークセンサ100であって、ピストンロッド30は、軸方向のストロークによって異なる形状が軸方向に形成される磁気スケール60を備え、シリンダチューブ20は、磁気スケール60の形状によって出力が変化するMRセンサ50を備える。
(もっと読む)
ベルト式無段変速機
【課題】ベルト式無段変速機において、簡易な構造で小型化に対応することができ、実際の変速比を正確に検出することができるようにする。
【解決手段】ベルト式無段変速機30は、可動シーブ34bの外周端部34eに形成された測定面34hと、外周端部34eに離隔して設けられた変位センサ90であって、測定面34hと変位センサ90との間の距離を測定する変位センサ90とを有する。測定面34hは、可動シーブ34bが軸方向に移動するにつれて、測定面34hと変位センサ90との間の距離Hが変化するように形成される。
(もっと読む)
121 - 140 / 585
[ Back to top ]