
Fターム[2F063AA02]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定内容 (2,719) | 位置、座標、変位、移動量 (976) | 1次元の (585)
Fターム[2F063AA02]に分類される特許
41 - 60 / 585
変位センサ
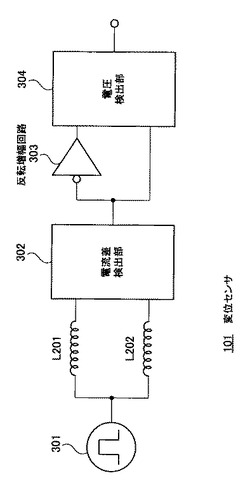
【課題】検出コイルを金属製の外殻で覆っても、渦電流損失を小さく抑え、必要十分な位置検出感度を得ることができる変位センサを提供する。
【解決手段】二つのコイルに矩形波電圧を印加して、各々のコイルに流れる電流を独立して検出してから差動回路等で差を演算するのではなく、直接電流の差の値を検出することにより、S/N比が良好であり高感度な変位センサを実現できる。また、各々のコイルは同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
(もっと読む)
変位検出機構およびそれを用いた走査型プローブ顕微鏡

【課題】光てこ方式又は自己検知型の変位検出ではないカンチレバーの変位検出機構ならびにそれを用いた走査型プローブ顕微鏡を提供することを目的とする。
【解決手段】LC共振器とF−V変換器とから構成されるカンチレバー変位検出器により、カンチレバーと試料表面との間の静電容量変化を検出することで、カンチレバーの変位を検出可能とした。これにより光を遮断した状態で形状測定や物性測定が可能となり、更には光の有無による試料の形状や物性情報の変化を測定可能とした。
(もっと読む)
回転部材用物理量測定装置
【課題】回転部材の変位量とこの回転部材に作用する荷重とのうちの少なくとも一方の物理量を測定する為に使用する、エンコーダ1aの被検出面に対向させたセンサの出力信号に基づいて、前記回転部材の回転速度を精度良く測定できる構造を実現すべる。
【解決手段】前記エンコーダ1aの被検出面に設けた各特性変化組み合わせ部3a、3aを構成する1対の透孔11a、11bのうち、一方の透孔11aを前記被検出面の幅方向に形成し、他方の透孔11bをこの幅方向に対して傾斜した方向に形成する。このうちの一方の透孔11a、11aに基づいて発生するパルス間の周期L(L1、L2)に基づいて、前記回転部材の回転速度を測定する。
(もっと読む)
リング状ボンド磁石
【課題】可撓性、柔軟性、及び加工性を低下させる事無く、磁気センサやリードスイッチを作動させるための十分な磁力性能を確保する事が出来るリング状ボンド磁石を安価に提供する。
【解決手段】硬磁性材料をゴムまたは樹脂材料に練り込んだリング状硬磁性ボンド磁石の一部に、軟磁性材料をゴムまたは樹脂材料に練り込んだリング状軟磁性体を一体化する。
(もっと読む)
工具位置決め方法および工具位置決め装置
【課題】 工具とワークに電圧を印加し、非接触状態で電流を検出して位置決めを行うものであって、印加電圧が大きい場合でも工具およびワークの損傷を防いで高精度の位置決めを行うことができ、さらにアルミニウム材でも高精度の位置決めを行うことができる工具位置決め方法および工具位置決め装置を提供する。
【解決手段】 工具1およびワーク2に接続するための電極3a,3bと、電極3a,3bの間に直列に接続される制限抵抗5と、制限抵抗5を介して電極3a,3b間に電圧を印加する電圧供給装置4と、制限抵抗5の両端の電位差を増幅する差動増幅器6と、差動増幅器6から出力される電圧を判定基準電圧と比較するコンパレータ7と、コンパレータ7の出力を検出して電圧供給装置4からの電圧供給を遮断する遮断装置13とを備える工具位置決め装置により位置決めを行う。
(もっと読む)
長手方向に可動であり、且つ回転可能である軸の軸方向位置及び回転位置を検出するセンサ装置
【課題】長手方向に可動であり、且つ回転可能である軸の並進運動も回転運動も簡単且つ単純に検出することができる、長手方向に可動であり、且つ回転可能である軸、例えばマニュアルトランスミッションのシフト軸の軸方向位置及び回転位置を検出するためのセンサ装置を提供する。
【解決手段】センサ装置が、軸の長手方向において、有利には一列で軸に平行に配置されており、且つ、軸に関して位置固定されて配置されている少なくとも二つのセンサ素子を備えた線形センサと、軸が回転運動する際に、別個に評価可能なセンサ素子の内の少なくとも一つにおいて、回転角に依存する測定信号の一義的な変化を生じさせる発生器とを備える。
(もっと読む)
バルブ制御装置
【課題】 アクチュエータのロッド4の軸振れ幅、つまり磁性移動体7の振れ幅の違いによるストロークセンサの出力値の差を低減して、ロッド4のストローク量の検出精度を向上することを課題とする。
【解決手段】 ウェイストゲートバルブ制御装置においては、ホール素子の感磁面を、磁性移動体7の中心を通り、且つ第1直線AOA’に平行な第1仮想直線LAと、磁性移動体7の中心を通り、且つ第2直線BOB’に平行な第2仮想直線LBとの交差角度の範囲内において、第1直線AOA’に平行な第1仮想直線LAと第2直線BOB’に平行な第2仮想直線LBとの交差角度の中心線(∠AOBの角度中心線LX)上に配置したことにより、ホール素子の感磁面に対する磁束密度(磁界の強さ)の変化を小さくすることができる。これにより、ロッド4の軸振れを要因とするストロークセンサの出力値の差を低減できる。
(もっと読む)
多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法
【課題】圃場に埋設された複数のセンサユニットの位置を設置後に収集可能な多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法を提供する。
【解決手段】1本の伝送路に固定された複数のセンサユニットそれぞれによって前記伝送路を介して返される応答から、前記各センサユニットが固定された位置から前記伝送路の一端までの伝送路長と前記各センサユニットの固定位置における前記伝送路の屈曲方向に関する情報とを含む情報を抽出する情報抽出部と、前記情報抽出部で抽出された情報に基づいて、前記複数のセンサユニットの配置を推定する配置推定部とを備える。
(もっと読む)
静電容量検出装置および接触検知センサ
【課題】検出対象物が接近する以外のノイズ事象の影響を受けずに、静電容量値の増加を検出して検出対象物の接近を確実に判別できる静電容量検出装置を提供する。
【解決手段】第1および第2電極と導電性基体との間に形成される第1および第2静電容量と、第1および第2静電容量の各静電容量値を所定の時間間隔で検出する検出部と、各静電容量値の時間変化分である第1変化容量ΔC1および第2変化容量ΔC2を演算する演算部(S11、S21)と、第1変化容量ΔC1が第1閾値A1以上で第2変化容量ΔC2が第2閾値A2未満のときに第1電極へ検出対象物が接近したと判定する第1判定処理(S12〜S14)、および、第2変化容量ΔC2が第4閾値A4以上で第1変化容量ΔC1が第3閾値A3未満のときに第2電極へ検出対象物が接近したと判定する第2判定処理(S22〜S24)のうちの少なくとも一方の判定処理を行う判定部と、を備える。
(もっと読む)
車両の変速操作装置
【課題】複数の変速レンジのうちのいずれか1つを選択できるようにすると共に、特定の変速レンジにおいては、運転者の連続的な操作意志を追加的に表現できるようにし、運転者の連続的な操作意志に伴う制御が行えるようにした車両の変速操作装置を提供する。
【解決手段】メインシャフトと、メインシャフトに沿った摺動と回動とが可能なように設けられた変速レバーと、変速レバーが単一経路上を往復移動できるように、変速レバーの移動経路を規定すると共に、複数の変速レンジが前記移動経路上に並んで配置されたゲートパターンを備えたゲートプレートと、を含んで構成され、
ゲートパターンは、特定の1変速レンジを除いた残りの変速レンジと、特定の1つの変速レンジと、が互いに区分できるように形成され、特定の1つの変速レンジは、変速レバーがゲートプレートに対し連続的に変位するように設定されていることを特徴とする。
(もっと読む)
対象物の構成金属および対象物までの距離を検知するセンサおよび方法
【課題】本願発明は、対象物を構成する金属ならびに検知コイルから対象物までの距離を極めて短時間で検知できる材質測距センサを提供する。
【解決手段】本願発明に係る材質測距センサは、LCR共振回路部と、これに高周波電流を供給するための駆動部と、LCR共振回路部の駆動電圧および駆動電流を検出する駆動電圧検出手段および駆動電流検出手段と、駆動電圧および駆動電流からn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、n次駆動電圧およびn次駆動電流から共振周波数および負荷抵抗を算出する制御部と、複数の既知の金属、および複数の既知の対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、制御部は、算出された共振周波数および負荷抵抗と、記憶されたものとを比較して、対象物の構成金属または対象物までの距離を検知するものである。
(もっと読む)
センサ異常判定装置
【課題】ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
(もっと読む)
位置検出装置
【課題】広い検出範囲でありながら、高い測定精度をもち安価で小型の位置検出装置を提供する。
【解決手段】磁石3の長さより短い配置間隔で磁気検知器5を複数個並べ、検出範囲を複数の磁気検知器5で分割して測定する。これにより任意の検出範囲の位置検出装置が製作でき、検出範囲が長い場合でも磁石3が小型にでき、さらに位置検出装置の全長を短くできる。また、磁石3の着磁方向を移動方向に異極とし、移動方向に垂直な方向の磁力線を検出対象とすることで、磁力線の強さが磁石の全長方向に広い範囲でなだらかに変化するので、検出精度の高い位置検出装置が実現できる。さらに検出範囲を複数の磁気検知器5で分割して測定するので、位置測定の分解能を高くでき、高精度の測定が可能となる。
(もっと読む)
歯車伝達装置用物理量測定装置
【課題】歯車伝達装置を構成する歯車4aの変位方向及び変位量を測定して、この歯車伝達装置が伝達するトルクの方向及び大きさを測定可能な構造を実現する。
【解決手段】1対のセンサ7a、7bの検出部を、はすば歯車であって他の歯車と噛合した前記歯車4aの外径側端部に形成した歯5aに対し、径方向及び軸方向に、それぞれ対向させる。この歯車4aは、トルク伝達に伴って軸方向に変位する。そして、前記センサ7a、7bの出力信号同士の間に存在する位相差が、前記歯車伝達機構が伝達するトルクの方向及び大きさにより変化する。そこで、この位相差に基づいて、このトルクを求める。
(もっと読む)
変位量検出機構及びこれを備えた斜軸式油圧ポンプ
【課題】 外形寸法を大きくせず、しかも、0点調整が容易な変位量検出機構を提供する。
【解決手段】 複数本のバネを直列に接続し、前記バネ間の接続部の変位をセンサにて検知することを特徴とする。
(もっと読む)
移動体の位置読取装置
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
渦電流探査による構造物の位置検出方法及び位置検出装置
【課題】構造物の表面側及び裏面側に存在する複数種の形状変化部や付属部材の位置を検出する場合、観測波形が各々の信号の重畳した形状となるため、各々を識別した位置検出が困難になる。
【解決手段】高周波数励磁信号と低周波数励磁信号で形状変化部と付属部材の検出信号を抽出し、位相分離検出で形状変化部と付属部材の検出信号を識別するとともに、信号の振幅と幅でしきい値判別して、形状変化部及び付属部材の有無を確認するとともにその中心位置を決定する。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
埋設ケーブルまでの距離を推定する推定方法、及び試掘方法
【課題】埋設ケーブルまでの距離を簡単かつ正確に推定する。
【解決手段】埋設ケーブルまでの距離を推定する推定方法であって、埋設ケーブル上方の第一地点と、前記第一地点から距離Δ離れた第二地点の2地点で磁束密度Bをそれぞれ測定し、測定した2地点の磁束密度Bの比を計算することによって前記第一地点における磁束密度Bの変化率Wを算出し、算出した磁束密度Bの変化率Wに基づいて前記第一地点から埋設ケーブルまでの距離Lを推定する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】本発明は、簡易な構成でアンテナ間の距離を推定する。
【解決手段】本発明は、対向して配される準静電界を用いて通信を行う差動線状アンテナ41を含むアンテナ40間の距離をAGC回路113及び123により算出される増幅率に基づいて推定するので、対向して配されるアンテナ40間の距離を測定するために別途装置や回路を設けることなく推定することができるので、構成を簡易にすることができる。
(もっと読む)
41 - 60 / 585
[ Back to top ]