
Fターム[2F063AA02]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定内容 (2,719) | 位置、座標、変位、移動量 (976) | 1次元の (585)
Fターム[2F063AA02]に分類される特許
21 - 40 / 585
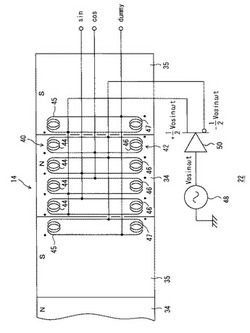
磁気式変位センサと変位検出方法
【課題】
永久磁石の列とコイルの列との相対速度が磁気式変位センサの出力に影響しないようにすると共に、永久磁石の列の長さを短くできるようにする。
【構成】
磁気式変位センサが、変位の検出方向に沿って、同数のコイルから成り、かつ変位の検出方向に沿っての列の始まりと終わりの位置が等しい少なくとも2列のコイルの列と、永久磁石の列とを備え、永久磁石の列とコイルの列との相対速度と、永久磁石の列からの磁界とによる変位センサの出力への影響を、少なくとも2列のコイルの列間でキャンセルする。
(もっと読む)
移動体システムと移動体の位置検出方法

【課題】
カーブ区間で移動体の位置を正確に求める。
【構成】
移動体に被検出用の磁石の列が設けられ、移動体の走行方向に沿っての検出範囲の長さが磁石の列の長さよりも短い磁気式変位センサが、移動体が走行する軌道の少なくともカーブ区間に複数個間隔を空けて配置されている。移動体の位置に応じて、複数個の変位センサを順番に切り換えるように選択することにより、移動体の位置を求める統合ユニットが設けられている。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
導電性膜センサ及び導電性膜の検出方法
【課題】導電性膜の位置及び特性を特定可能な、導電性膜センサを提供する。
【解決手段】周波数が異なる第1及び第2の磁界を放射する磁界放射器1と、導電性膜に第1の磁界を照射した場合の、磁界放射器1の特性、導電性膜の位置及び特性の第1の関係と、第2の磁界を照射した場合の、磁界放射器1の特性、導電性膜の位置及び特性の第2の関係と、を保存する記憶装置401と、測定対象導電性膜2に第1の磁界を照射した場合の磁界放射器1の特性及び第1の関係に基づき、導電性膜の位置及び特性の第3の関係を算出し、測定対象導電性膜2に第2の磁界を照射した場合の磁界放射器1の特性及び第2の関係に基づき、導電性膜の位置及び特性の第4の関係を算出する算出部301と、第3及び第4の関係に共通する、導電性膜の位置及び特性の組み合わせを特定する特定部303と、を備える導電性膜センサ。
(もっと読む)
導電体センサ及び導電体の検出方法
【課題】少なくとも2つの導電体のそれぞれの位置を特定可能なセンサを提供する。
【解決手段】第1及び第2の磁界を放射する磁界放射器1と、第1及び第2の導電体に第1の磁界を照射した場合の、磁界放射器1の特性、第1及び第2の導電体の位置の第1の関係と、第2の磁界を照射した場合の、磁界放射器1の特性、第1及び第2の導電体の位置の第2の関係と、を保存する記憶装置401と、第1の測定対象導電体2及び第2の第1の測定対象導電体2に第1の磁界を照射した場合の磁界放射器1の特性及び第1の関係に基づき算出された、第1及び第2の導電体の位置の第3の関係と、第2の磁界を照射した場合の磁界放射器1の特性及び第2の関係に基づき算出された、第1及び第2の導電体の位置の第4の関係と、に共通する、第1及び第2の導電体の位置を特定する特定部303と、を備える導電体センサ。
(もっと読む)
間隙測定装置、表面形状測定装置、間隙測定方法および表面形状測定方法
【課題】探針と試料とが衝突するのを防ぐことができ、比較的高速での走査が可能で、分解能が高く、正確な表面形状を得ることができる間隙測定装置、表面形状測定装置、間隙測定方法および表面形状測定方法を提供する。
【解決手段】探針12が、試料1の表面にほぼ垂直な方向に沿って振動するよう、試料1の表面との間に隙間をあけて配置されている。電圧印加手段14が、試料1と探針12との間に直流バイアス電圧を印加可能である。制御手段15が、走査手段11により探針12を走査しつつ、振動する探針12が検出した電圧印加手段14による電界信号に基づいて、試料1の表面と探針12との距離を求めるとともに、探針12が検出する電界信号の平均値が一定になるよう、走査手段11により探針12を垂直方向に移動させる。制御手段15は、求められた試料1の表面と探針12との距離と、探針12の軌跡とから試料1の表面形状を求める。
(もっと読む)
磁気抵抗素子を用いた位置検出装置及びこれを用いたレンズユニット
【課題】組立・調整作業が容易で良好な出力特性が得られる小型の位置検出装置およびこれを用いたレンズユニットを提供する。
【解決手段】磁気抵抗素子3を保持するホルダ5は、一端に磁気抵抗素子3の感受面と略平行且つ移動方向と直交する方向に突出した凸部を有し、ベース7は、前記凸部が挿入される凹部と、光軸と平行な方向に配設され、互いに平行な2つの平面部25を有する2つの突出部21と、ベース7を鏡筒に取り付ける位置決め手段とを備え、シムは、突出部21に設けられた平面部25と前記鏡筒との間に挿入され、ベース7を前記位置決め手段によって前記鏡筒に取り付ける際に、ベース7が突出部21を基点として湾曲することにより、磁気記録媒体と磁気抵抗素子3の間隔を調整し、前記シムは、その厚みを変更することで前記ベース7の前記鏡筒に対する距離が調整され、磁気抵抗素子3の前記磁気記録媒体に対する倒れが補正される。
(もっと読む)
位置センサ
【課題】複数のスイッチのオン・オフ状態を特定して、押されたスイッチの位置を検出することができ、且つスイッチの数が増えても入出力ポート数が増加することのない位置センサを得る。
【解決手段】直列接続され、互いに抵抗値の異なる複数の抵抗素子Rと、各抵抗素子に対しそれぞれ設けられ、対応する抵抗素子の抵抗負荷をオン・オフする複数のスイッチSWと、前記直列接続された複数の抵抗素子の両端間に所定の定電流を供給する定電流供給手段2と、前記直列接続された複数の抵抗素子の両端間における電圧値を測定する電圧測定手段3とを備え、前記複数の抵抗素子の抵抗値は等比数列状に異なり、前記複数のスイッチのオン・オフ状態の全ての組み合わせにおいて、前記複数の抵抗素子の合成抵抗値が互いに異なる。
(もっと読む)
位置検出装置、駆動機構、および内視鏡装置
【課題】位置検出の精度の高い位置検出装置、駆動機構、及び内視鏡装置を提供すること。
【解決手段】駆動部材15に対して直線移動する被駆動部材17の位置を検出する位置検出装置30であって、駆動部材15に対して位置決めして設けられた固定子31と、被駆動部材17に設けられた移動子34と、被駆動部材17と移動子34とを連結し、被駆動部材17の直線移動方向における被駆動部材17に対する移動子34の進退移動を規制する弾性体20と、を備え、弾性体20は、移動子34が固定されているとともに移動子34を固定子31へ向けて付勢する軸部23を有し、軸部23は、移動子34を固定子31に接触させ、且つ、駆動部材15に対して被駆動部材17が直線移動されたときに、固定子31に対する移動子34の位置を、固定子31の外面形状に沿って追従させる。
(もっと読む)
パンチング方法及びパンチング装置
【課題】間欠送りされる帯材をセンサに対する所定の検出位置に位置決め保持した状態で、帯材の加工位置への送り込み状態をセンサにより正確に検出することができるパンチング装置を提供する。
【解決手段】間欠送りされる金属製の帯材Wに対してその停止時にパンチ加工を施すためのパンチ機構と、帯材Wの送り異常を検出するための検出機構13とを備える。検出機構13は、非接触型のセンサ17と、そのセンサ17を保持する保持部材16と、その保持部材16に向かって帯材Wを押し付ける押圧部材18とを有する。押圧部材18は帯材Wの送りに伴って回転されるローラ20を有し、そのローラ20がバネ22の付勢力により帯材Wを保持部材16に向かって押圧する。
(もっと読む)
操作入力装置及び操作入力検出装置
【課題】操作部に作用する操作入力を検出する機能と操作部に振動を与える機能を単純な構成で実現できる、操作入力装置の提供。
【解決手段】コイル11と、操作入力の作用によりコイル11の軸方向に変位する操作部12と、操作部12の変位により、コイル11との位置関係が変化するコア13と、コイル11の外側に配置されたヨーク14と、コア13とヨーク14に流れる磁束を発生させるマグネット15とを有し、コイル11は、操作部12の変位量に応じた信号を出力し、操作部12は、コイル11に流れる電流とマグネット15の磁束によって可動する、ことを特徴とする、操作入力装置。
(もっと読む)
印刷位置検出方法
【課題】可撓性シートに対する印刷型の配置が種々である印版を使用して印刷を行う際に、初期段階であっても段ボールシートに印刷される位置を正確に検出することができる、印刷位置検出方法を提供する。
【解決手段】可撓性シート21上の印刷型22の基準点Q3から予め定める所定距離の第一基準点Q1に、印刷型22より高さの低い被検出体30を取り付け、版胴11の回転に伴う被検出体30の通過を第一センサ31によって検出し、挟持点Q0に向かい搬送される段ボールシート1上に第二基準点Q2を設定し、第二基準点Q2の通過を第二センサ32によって検出し、第一センサ31による第一基準点Q1の検出点と挟持点Q0との距離N1、第二センサ32による第二基準点Q2の検出点と挟持点Q0との距離N2、及び、印刷型の基準点Q3と第一基準点Q1との距離に基づき、段ボールシート1において印刷型の基準点に対応する点Q3’を検出する。
(もっと読む)
回転角度検出装置、、回転角度検出方法、部品実装装置
【課題】回転軸VAを中心とする回転動作の他に回転軸VA方向への移動も移動部材85が行なう構成において、移動部材85の回転角度θeを磁気センサにより高精度に検出することを可能とする。
【解決手段】磁石91とホールIC921、922との回転軸VA方向への距離hが所定の検出距離となる検出位置Pdに移動部材85がある状態でのホールIC921、922の出力信号Ss、Scに基づいて、アーム61bに対する移動部材85の回転角度θeを検出する。したがって、ホールIC921,922と磁石91との距離の変化による影響を排して、ホールIC921,922の出力信号Ss、Scから、アーム61bに対する移動部材95の回転角度θeを高精度に検出することが可能となる。
(もっと読む)
変位検出装置
【課題】変位検出装置において、全長を短縮する。
【解決手段】変位検出装置1は、検出コイル2と、検出コイル2に対して変位可能に設けられた変形可能な変位体3と、外部からの作用を受けて変位することにより、変位体3を変位させる変位取り出し部5と、変位体3が変位取り出し部5により変位させられるときに、変位体3の少なくとも一部を変形させて曲線軌道で変位させる巻取り部4a、4bとを備える。巻取り部4a、4bは、変位体3が変位取り出し部5により変位させられるときに、変位体3の少なくとも一部を巻取ることによって、変位体3の少なくとも一部を変形させて曲線軌道で変位させる。変位体3は、変位取り出し部5により変位させられるとき、巻取り部4aに巻取られると共に巻取り部4bから繰り出され、又は、巻取り部4bに巻取られると共に巻取り部4aから繰り出される。これにより、変位検出装置1の全長を短縮することができる。
(もっと読む)
圧延ロール位置測定装置
【課題】圧延ロールとギャップセンサとの間の間隙を制御する必要が無く、圧延ロールが緊急退避した場合でもギャップセンサが破損したり、圧延ロールの表面に疵が付いたりすることのない圧延ロール位置測定装置を提供する。
【解決手段】圧延ロール位置測定装置10は、下圧延ロール12の圧延面14までの距離を測定するギャップセンサ23及び圧延面14に向けて流体Wを噴出する噴出口24を有するギャップ測定部17と、ギャップ測定部17の下方に設置され、内部に流体Wが供給される容器20と、容器20に対するギャップ測定部17の相対変位を測定する変位計19と、ギャップ測定部17に変位計19を介して連結され、容器20内に充填される流体Wの浮力でギャップ測定部17を押し上げる浮体部25とを備えている。
(もっと読む)
位置検出構造
【課題】基体48に対して相対移動する移動物体20における互いに離れた2位置への移動を検出する位置検出構造において、互いに離れた2位置への移動物体の移動を単一のセンサで、誤検出なく区別して検出する。
【解決手段】基体(ホルダ)48と移動物体(プラットホーム)20との対向部位の一方で、前記2位置のうちの一つの位置に検出センサ50を設け、該検出センサは、各位置において互いに異なった電気信号を発生する。一つの検出センサが2位置でそれぞれ異なった信号を発生するので、一つのセンサで2位置への移動物体の移動を区別して検出することができる。
(もっと読む)
位置検出装置及び位置検出方法
【課題】温度特性のバラツキを解消し、縦方向のガタツキによる誤差をなくすようにした位置検出装置及び位置検出方法を提供すること。
【解決手段】ホール素子(22a)のホール電圧Vhe1は、A・K・Bhe1(Aはプレアンプ(32)の増幅率、Kは定数、Bhe1はホール素子が受ける磁束密度)になったとすると、PIレギュレータ(41)はフィードバック制御によってA・K・Bhe1+Vref=AGND(=0)になるように、PI出力のバイアス点を自動的に変化させる。増幅後のホール素子(22b)のホール電圧Vhe2はA・K・Bhe2となる。K=−Vref/A・Bhe1であるから、ホール素子のホール電圧Vhe2は、−Vref・Bhe2/Bhe1となる。ホール電圧は、磁束密度と比例するので、ホール素子(22a)とホール素子(22b)の出力電圧を割り算していることと等価である。
(もっと読む)
車両変速機用操作装置
【課題】検出手段の数を少なくできる車両変速機用操作装置を得る。
【解決手段】シフトレバー20と一体に移動する銅片112と鉄片114がセレクト操作方向に互いに対向して設けられており、この銅片112と鉄片114との間に近接センサ82〜90の検出コイル84〜92がシフト操作方向に並んだ状態で設けられている。シフトレバー20を左側シフト孔62側へセレクト操作すると銅片112が検出コイル84〜92に接近し、右側シフト孔64側へセレクト操作すると鉄片114が検出コイル84〜92に接近する。銅片112や鉄片114が検出コイル84〜92に接近すると、検出コイル84〜92の周囲に形成される高周波磁界が変化するが、銅片112が検出コイル84〜92に接近した場合と鉄片114が検出コイル84〜92に接近した場合とでは高周波磁界の変化が異なるため、少ない近接センサ82〜90で多くのシフトレバー20の位置を検出できる。
(もっと読む)
変位センサ
【課題】検出コイルを金属製の外殻で覆っても、渦電流損失を小さく抑え、必要十分な位置検出感度を得ることができる変位センサを提供する。
【解決手段】二つのコイルに矩形波電圧を印加して、各々のコイルに流れる電流を独立して検出してから差動回路等で差を演算するのではなく、直接電流の差の値を検出することにより、S/N比が良好であり高感度な変位センサを実現できる。また、各々のコイルは同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
(もっと読む)
変位検出機構およびそれを用いた走査型プローブ顕微鏡
【課題】光てこ方式又は自己検知型の変位検出ではないカンチレバーの変位検出機構ならびにそれを用いた走査型プローブ顕微鏡を提供することを目的とする。
【解決手段】LC共振器とF−V変換器とから構成されるカンチレバー変位検出器により、カンチレバーと試料表面との間の静電容量変化を検出することで、カンチレバーの変位を検出可能とした。これにより光を遮断した状態で形状測定や物性測定が可能となり、更には光の有無による試料の形状や物性情報の変化を測定可能とした。
(もっと読む)
21 - 40 / 585
[ Back to top ]