
Fターム[2F063LA30]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 特定されたその他のもの (91)
Fターム[2F063LA30]に分類される特許
61 - 80 / 91
回転角度検出装置および回転角度検出装置付き軸受
【課題】 高速かつ高精度の回転角度検出装置、およびその回転角度検出装置を備えた軸受を提供する。
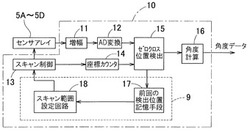
【解決手段】 磁気発生手段に回転中心の軸方向に配置された複数のライン状の磁気センサアレイと、その出力をデジタル信号に変換するAD変換回路と、出力から磁界分布のゼロクロス位置を検出するゼロクロス位置検出手段と、ゼロクロス位置から磁気発生手段の回転角度を検出する角度計算手段とを備える。検出されたゼロクロス位置を記憶する検出位置記憶手段と、記憶されたゼロクロス位置を元に所定の基準で磁気センサアレイの次回のスキャン範囲を設定するスキャン範囲設定手段と、スキャン範囲設定手段で設定したスキャン範囲で磁気センサアレイ検出信号を読み出すスキャン回路とを設ける。スキャン範囲として限定された部分的な検出信号を用いてゼロクロス位置を検出し、この部分的な検出信号から検出されたゼロクロス位置から回転角度を検出する。
(もっと読む)
高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システム

【課題】振幅に加え位相も計測対象として位置精度を向上させる高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システムを提供する。
【解決手段】励磁コイルと、この励磁コイルと対向する複数の検出コイルと、励磁コイルと検出コイルとの間に配置されるLC共振型磁気マーカと、励磁コイルはLC共振型磁気マーカの共振周波数に同調させた交流磁界を発生させ、LC共振型磁気マーカからの誘導磁界を複数の検出コイルの各検出コイルで計測する手段と、LC共振型磁気マーカをセットした状態での検出コイルによる第1の誘起電圧を計測する手段と、LC共振型磁気マーカをセットしない状態での検出コイルによる第2の誘起電圧を計測する手段と、第1の誘起電圧と第2の誘起電圧の位相差θを求める手段と、この位相差に基づいてLC共振型磁気マーカの寄与電圧を求める手段とを具備する。
(もっと読む)
渦電流センサおよび同センサのセンサ・コイル
【課題】温度以外の環境要因の影響を受け、測定回路内で変化する寄生容量を原因とするセンサ出力信号のドリフトを減少させ、渦電流センサの測定精度を向上させる。
【解決手段】ヘッド部分を持つセンサ回路を有する渦電流センサにおいて、センサ回路は、センサ・コイル、ベース部分、ヘッド部分をベース部分に接続する通信ケーブルを含む。センサ・コイルは、内部導体とケーブルの外側シールドとの間に接続される。ベース部分は、ケーブルの線路容量をセンサ・コイルから分離し中心導体の電圧を緩衝し、3軸ケーブルの内側シールドに印加する電圧フォロワを備える。
(もっと読む)
回転角度検出装置
【課題】磁気感知素子による出力信号に基づき被検出回転体の回転角度を検出するにあたってその出力信号の振幅値やオフセット値にずれが生じた場合であれ、被検出回転体に対する検出精度をより好適に維持することのできる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、クランク軸300の回動に伴って回動する着磁ロータ200から発せられる磁気ベクトルMVの変化を90度だけ位相のずれた正弦波信号A、Bとして感知する3つのホール素子対111a〜111cを有している。これら3つのホール素子対111a〜111cは、各々傾けて配置されている。ここで、回転角度検出装置は、それらホール素子対111a〜111cの別に上記クランク軸300の回転角度θを「θ=tan−1(A/B)」の演算式に基づいて算出する。次いで、算出した3つの信号の位相関係を維持しつつそれらの平均値を演算する。
(もっと読む)
流体圧シリンダ用センサ
【課題】市販の部品で定電流回路を構成できるとともに、定電流ダイオードを使用した従来品に比較して小型化することができる流体圧シリンダ用センサを提供する。
【解決手段】MRセンサパッケージ18から検出信号が出力されるとONになる第1のトランジスタ28、発光ダイオード19及び第2のトランジスタ29を備える。定電流回路30を構成するNPNトランジスタQ1のコレクタ−ベース間に第1の抵抗R1が接続され、NPNトランジスタQ1のコレクタ端子が第2のトランジスタ29のエミッタ端子に接続され、NPNトランジスタQ1のエミッタ端子側が第2のトランジスタ29のコレクタ端子に接続されている。NPNトランジスタQ1のエミッタ端子に一端が接続された第2の抵抗R2と、NPNトランジスタQ1のベース端子にコレクタ端子が接続されるとともにベース端子がNPNトランジスタQ1のエミッタ端子に接続された第2のNPNトランジスタQ2とを備える。
(もっと読む)
エレベータのかご位置検出装置
【課題】この発明は、設置スペースをより縮小することができるとともに、より簡単に据え付けることができるエレベータのかご位置検出装置を提供することを目的とするものである。
【解決手段】かご4には、検出エリアにおける静電容量を検出する検出センサ24d,24eが取り付けられている。各作動位置15U〜18U,15D〜18Dには、作動片5e〜8eが配置されている。作動片5e〜8eは、かご4の昇降により検出センサ24d,24eの検出エリアに相対的に進入する。また、作動片5e〜8eは、検出エリアに進入した状態での検出エリアの静電容量をそれぞれ異ならしめるようになっている。エレベータ制御装置30は、検出センサ24d,24eが検出した静電容量に基づいてかご4の位置を判定する。
(もっと読む)
位置検出装置、及び、それを備えた液晶表示装置
【課題】位置指示装置によって選択された位置を安定して検出するとともに、位置検出装置、及び、それを用いた液晶表示装置を提供する。
【解決手段】複数の表示画素PXがマトリクス状に配置された液晶表示パネル10と、液晶表示パネル10の背面に配置された面光源装置20と、面光源装置20の背面に配置された位置検出装置30と、を備え、位置検出装置30は、平面上に配列された複数のコイルセンサXn、Ymを備えたセンサ部302と、複数のコイルセンサXn、Ymを順次選択する選択回路304と、選択回路304によって選択されたコイルセンサに入力される出力信号を発生する発振器322と、選択回路304によって特定の位置に配置されたコイルセンサXn、Ymが選択されたときに、発振器322の出力信号を強くする手段と、を備えた液晶表示装置。
(もっと読む)
電磁アクチュエータのエアギャップ推定装置
【課題】 電磁アクチュエータからサーチコイルを無くし、簡単な構成で正確にエアギャップを推定できる電磁アクチュエータのエアギャップ推定装置を提供することである。
【解決手段】 励磁コイルを有するコアと、エアギャップを介して該コアと対向するように配置されたアーマチュアとを有する電磁アクチュエータのエアギャップ推定装置であって、車両の停止状態を検出する車両停止状態検出手段と、前記車両停止状態検出手段により車両の停止状態を検出した際に、前記励磁コイルに所定の定電圧を印加する定電圧印加手段と、前記定電圧印加手段で前記励磁コイルに定電圧を印加した際に、前記励磁コイルの時定数を計測する時定数計測手段と、前記時定数と前記励磁コイルの抵抗から該励磁コイルのインダクタンスを算出するインダクタンス算出手段と、前記インダクタンス算出手段で算出したインダクタンスに基づいて、エアギャップを推定するエアギャップ推定手段と、を具備して構成する。
(もっと読む)
タイヤ変形量の推定方法とその装置
【課題】 バルクハウゼンノイズの応力による変化の検出精度を向上させて、タイヤの変形量を正確に推定する方法を提供する。
【解決手段】 タイヤ50のショルダー部51の内部側に貼着され強磁性体から成るセンサ11に電磁波を放射し、上記センサ11からのバルクハウゼンノイズが重畳した電磁波の信号を検出し、この信号から抽出されたバルクハウゼンノイズのデータからタイヤ変形量を測定する際に、上記抽出されたバルクハウゼンノイズを周波数分析してその周波数スペクトルを求めるとともに、上記センサ11に応力が作用した場合と作用しない場合のそれぞれについて、上記周波数スペクトルの高調波出力を算出し、この高調波出力の大きさを比較することにより、当該タイヤ50のショルダー部51の変形量を推定するようにした。
(もっと読む)
表面形状測定用触針式段差計及びその自動較正方法
【課題】
触針式段差計において探針を交換した後に行う力の較正を自動的に短時間で正確に行う方法及び該自動較正機能を備えた触針式段差計を提供する。
【解決手段】
本発明の方法は、針圧発生装置のコイルに流す電流と探針の針圧との関係を求め、求めた関係に基いて探針の針圧の変化を自動的に較正する。また本発明の自動較正機能を備えた触針式段差計においては、針圧発生装置のコイルに流す電流と探針の針圧との関係を求め、求めた関係に基いて探針の針圧の変化を自動的に較正するコンピュータ手段が設けられる。
(もっと読む)
ギャップ検出装置
【課題】 プラズマの発生状況が変化しても、精度よくノズルとワーク間のギャップを検出することができるギャップ検出装置を得ることを目的とする。
【解決手段】 中心電極ケーブル4を通る合成信号における周波数f1の成分と周波数f2の成分を検波する検波部8を設け、その検波部8により検波された周波数f1の成分と周波数f2の成分からノズル5とワーク6間のギャップに対応する検出信号を生成する。これにより、プラズマの発生状況が変化しても、精度よくノズル5とワーク6間のギャップを検出することができる。
(もっと読む)
回転角検出装置
【課題】回転角センサの出力を低回転角領域で増幅して用いる回転角検出装置において、該低回転領域でのセンサ出力−回転角変換特性を高精度に学習する。
【解決手段】ストッパで規制される最小回転角θ1と最大回転角θ2における回転角センサからの増幅しない出力(等倍出力)V1,V2から、第1変換特性におけるゲインdV/dθを学習した後、増幅した出力が選択される領域での小側および大側の回転角θmin、θmaxに対応する第1変換特性における出力Vmin、Vmax、同じく第2変換特性における出力Vnmin、Vnmaxに基づいて、第2変換特性におけるゲインdnV/dnθ{=(Vnmax−Vnmin)/(θmax−θmin)}を学習する構成とした。
(もっと読む)
距離測定装置及び工作機械
【課題】 渦電流センサのような、非測定対象物との距離に応じて誘導性インダクタンスが変化する変位センサに現れる信号レベルを検出して、非測定対象物との距離を測定する距離測定装置において、高精度な距離測定を実現可能とする。
【解決手段】 距離測定装置1を、非測定対象物3Aとの距離に応じて誘導性インダクタンスが変化する変位センサ10と、変位センサに交流信号を供給する発振回路であって供給する交流信号の周波数を変更することが可能な発振回路20と、異なる周波数の交流信号を印加された変位センサに現れる信号レベルの違いから変位センサ10の誘導性インダクタンスを測定するインダクタンス測定手段80と、測定された誘導性インダクタンスに基づき非測定対象物との距離を測定する距離測定手段90と、を備える。
(もっと読む)
接触検出器、指紋センサ及び指紋センサ製造方法
過電流が検出された際に接触センサの一部への電力供給を停止する電力スイッチを有する接触検出器を開示する。これにより、電力スイッチは、ラッチアップ又は他の電流を発生させる条件によって生じた過電流から接触センサを保護する。電流を発生させる条件は、多くの場合、接触検出器の表面におけるESD現象である。接触検出器は、物体の存在を検出するための露出表面と、絶縁表面と、絶縁表面の下に配置され、接触検出器の電力を制御する保護要素とを備える。保護要素は、接触検出器への電流が閾値を超えたことを検出すると、接触検出器への電力供給を停止する。接触検出器は、好ましくは、指スワイプセンサであるが、指又は他のパターンを有する物体と接触して機能する指位置センサ又は他の如何なるタイプの機器であってもよい。  (もっと読む)
(もっと読む)
動作検出装置および手話動作検出システム
【課題】 低コストにてリアルタイムに手および指の動きを検出することが可能な動作検出装置を提供することを課題とする。
【解決手段】 本発明は、指曲がり動作検出手段と、手姿勢検出手段41Lと、手位置座標検出手段21L,22Lとを備えた動作検出装置であって、前記指曲がり動作検出手段が、指の背に貼付された導電性ゴム31L,32L,33L,34L,35Lを用いて構成されていることを特徴としている。
(もっと読む)
媒体内に存在する対象物の位置検出方法および測定装置
本発明は、対象物(12)に相関する測定信号(UM)が形成され、そこから少なくとも1つの第1のステータス"対象物有り"(Z=a)と少なくとも1つの第2のステータス"対象物無し"(Z=b)とを区別する信号(Z)が形成される、媒体内に存在する対象物の位置検出方法に関する。本発明によれば、その時点での測定信号(UM)の値が先行して測定された局所的最大値(UMax,n)を設定された第1のパーセンテージ(P1)だけ下回る場合に、第1のステータス"対象物有り"(Z=a)から第2のステータス"対象物無し"への遷移が行われる。また本発明はこの方法を実行する測定装置、特に携帯可能な位置検出装置に関する。 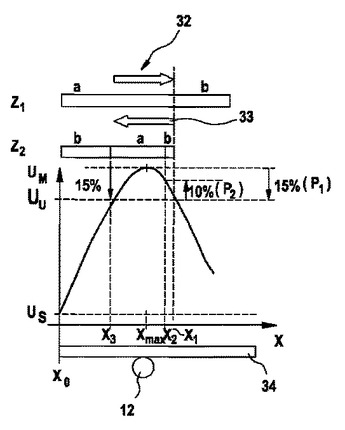 (もっと読む)
(もっと読む)
パターン検出装置および方法
【課題】 固体表面の凹凸パターンなどを簡単かつ精度よく高速に検出できるとともに、パターンを検出するための装置を小型かつ安価に製造する。
【解決手段】 (a)に示すように、ヒータ兼センサ層32の表面に、指34を接触させると、指34の表面で指紋を形成する皮膚の山34aが各抵抗素子33に接触する。各抵抗素子33に通電して発熱させると、皮膚の山34aに接触している抵抗素子33は、熱が逃げ、温度上昇の程度が、谷34bに対応する位置の抵抗素子33よりも小さくなる。(b)に示すように、開始時期をずらしながら、一部重複するように通電し、各抵抗素子33毎に一定時間以上の通電を、全体では短時間に行う。(c)に示すように、各抵抗素子33の抵抗値は、通電開始から一定時間経過後に検出する。各抵抗素子33への通電は、時間をずらしているので、ずれるタイミングに合わせて、サンプリングを切換え、1つの検出回路で、複数の抵抗素子33の抵抗値をシリアルに検出することができる。
(もっと読む)
表面変位測定方法及びこれに用いる表面変位測定装置
【課題】 人体支持・被覆体及び人体の間に簡易な部材を介在させた状態で、人体支持・被覆体表面の変位又はこの人体支持・被覆体表面に接触する人体表面の変位を測定する表面変位測定方法及び表面変位測定装置を提供すること。
【解決手段】
人体を支持する人体支持体及び/又は人体を被覆する人体被覆体である人体支持・被覆体の表面の変位を測定する。変形可能な被検出体50を人体支持・被覆体表面100に沿わせ、人体支持・被覆体100裏面側に被検出体50を検出するセンサ5とこのセンサを用いて走査するスキャナとを設け、スキャナによりセンサで被検出体を走査し、人体支持・被覆体の表面の変位を測定する。変形可能な被検出体を人体表面に沿わせ、人体支持・被覆体裏面側に被検出体を検出するセンサを設けても良い。
(もっと読む)
変位測定装置付玉軸受ユニット及び荷重測定装置付玉軸受ユニット
【課題】アキシアル荷重の変動に基づく外輪3とハブ4aとのアキシアル方向に関する変位を大きくできて、この荷重の測定精度を十分に確保できる玉軸受ユニットを実現する。【解決手段】上記ハブ4aに、被検出面の特性変化のピッチが、軸方向に関して漸次変化するエンコーダ12を外嵌固定する。このエンコーダ12に対向させたセンサ13の検出信号のデューティ比の変化により、上記外輪3とハブ4aとのアキシアル方向に関する変位を検出する。そして、この変位により、これら外輪3とハブ4aとの間に加わるアキシアル荷重を求める。各玉5、5の直径dとピッチ円直径Dとの比d/Dを0.12〜0.4の範囲に規制し、荷重変動に伴う上記デューティ比の変動を大きくする事で、上記課題を解決する。 (もっと読む)
位置制御装置、位置制御方法及び光学装置
【課題】 原点位置付近での位置制御対象物の位置検出精度の低下による位置制御装置の性能低下を防止する
【解決手段】 第2の移動範囲での位置制御対象物(201)の移動に応じて、周期信号とは異なる信号成分を含み不連続に変化する信号を生成し、この信号に基づいて原点位置を検出する。第1の移動範囲での位置制御対象物の移動に応じて、所定の周期で連続して変化する周期信号を生成し、この周期信号と原点位置とに基づいて位置制御対象物の絶対位置を検出する。
(もっと読む)
61 - 80 / 91
[ Back to top ]