
Fターム[2F065AA21]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606)
Fターム[2F065AA21]の下位に属するFターム
Fターム[2F065AA21]に分類される特許
41 - 60 / 664
構造の電磁散乱特性を計算し、近似構造を再構築する方法及び装置
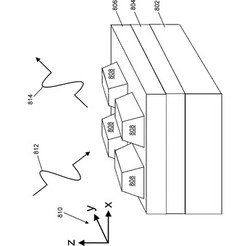
【課題】回折格子の輪郭を再構築するCSIアルゴリズムを開示する。
【解決手段】電流密度Jの体積積分式を解くには、Jの近似解を求めるように、E及びJの連続成分を選択することにより、電場ES及び電流密度Jに関連するベクトル場FSの暗示的構築を使用し、Fは1つ又は複数の材料境界にて連続している。Fは、少なくとも1つの方向x、yに関して少なくとも1つの有限フーリエ級数で表され、体積積分式を数値的に解くステップは、Fの畳み込みによってJの成分を決定することを含み、畳み込み演算子Mは、両方向の材料及び幾何構造の特性を含む。Jは、両方向に関して少なくとも1つの有限フーリエ級数で表すことができる。連続成分は、E及びJに作用する畳み込み演算子PT及びPNを使用して抽出することができる。
(もっと読む)
欠陥位置情報生成装置、欠陥確認システム及び欠陥位置情報生成方法

【課題】欠陥箇所に直接マーキングすることなく、検査官が長尺シート材における欠陥箇所をすみやかに特定することのできる欠陥位置情報生成装置等を提供する。
【解決手段】原点Mと、当該原点を識別するための記号との組合せが、長手方向に複数印字された長尺シート材Sを撮影した撮影画像において、原点M及び欠陥Dの位置を特定し、特定した原点Mのうち欠陥Dに1番目又は2番目に近い原点Mを基準として当該欠陥Dの位置を示す欠陥座標を算出する。基準となった原点Mと組合せをなす記号を示す記号情報と、算出した欠陥座標を示す欠陥座標情報とを含む欠陥位置情報を生成する。
(もっと読む)
グリーンタイヤのキャップトレッドのオフセットを測定する測定方法、測定装置及び測定プログラム
【課題】グリーンタイヤのキャップトレッドのセンターオフセット位置を自動で検出する。
【解決手段】グリーンタイヤのキャップトレッドのオフセット測定方法であって、回転自在なドラム上に載置されたグリーンタイヤの形状を計測する工程と、計測結果に基づきグリーンタイヤの基準高さhを算出する工程と、基準高さhにおけるキャップトレッドの幅をセリアル側及び反セリアル側で算出する工程と、算出したキャップトレッドの幅に基づきキャップトレッドのセンターオフセットの異常を判断する工程と、を有する。
(もっと読む)
グラスランの断面形状評価方法
【課題】グラスランにおける断面形状の各部の寸法の評価をインラインにて定量的に行える断面形状評価方法を提供する。
【解決手段】押出成形後に所定長さに裁断された断面略チャンネル状のグラスラン1の切断面をCCDカメラ28で撮像し、断面形状の良否を画像解析装置33により評価する。撮像する工程のほか、側壁部とリップのそれぞれの長さと側壁部に対するリップ先端までの距離を計測してその良否判定を行う工程と、底壁部の幅寸法を計測してその良否判定を行う工程と、各側壁部と底壁部との相対位置関係として底壁部と各側壁部とのなす角度を計測してその良否判定を行う工程と、を含んでいる。
(もっと読む)
観察対象物の表面の3次元ビューを表示するための方法および装置
【課題】観察対象物の表面の3次元ビューを表示し、表面の凹凸、寸法を取得する方法及び装置を提供する。
【解決手段】複数の表面点の第1の座標系における3次元座標を決定し、観察対象物の表面の複数の測定点を選択し、複数の測定点のうちの1つまたは複数に隣接した複数の表面点のうちの3つ以上の第1の座標系における3次元座標に基づいて基準表面250を決定し、基準表面および複数の測定点に基づいて第1の座標系とは異なる第2の座標系を設け、複数の表面点の第1の座標系における3次元座標を第2の座標系における3次元座標に変換し、複数の測定点に基づいて、観察対象物202の表面210の対象領域262内である複数の表面点のサブセットを決定し、第2の座標系の3次元座標に複数の表面点のサブセットの描画された3次元ビューを表示する。
(もっと読む)
ラベル作成用処理プログラム及びラベル作成処理方法
【課題】ラベルのサイズを自動的に決定することで操作負担を低減し、操作者の利便性を向上する。
【解決手段】操作端末10の制御回路102は、対象物Fの実寸法Bを決定する基準となる基準物Kの実寸法Aを取得し、タッチパネル112に表示される基準物Kの表示寸法A′と貼り付け領域Zの表示寸法B′との寸法比A′/B′を取得し、取得された基準物Kの実寸法Aと寸法比A′/B′とを用いて、貼り付け領域Zの実寸法Bを算出し、算出された貼り付け領域Zの実寸法Bに基づき、対象物Fに貼り付けるラベルLのサイズを設定するための、ラベル作成用処理プログラムを実行する。
(もっと読む)
電子カメラ、画像表示装置、プログラム及び記録媒体
【課題】 本発明は、装置が大型化せず、簡単な構成でサイズ情報を容易に取得し、そのサイズ情報を記録用画像に関連付ける手段を提供する。
【解決手段】 電子カメラは、撮像部と、認識部と、選択部と、第1算出部と、第2算出部と、記録処理部とを備える。撮像部は、撮影光学系を介して被写体の像を撮像する。認識部は、撮像部が生成する第1画像から主要被写体を認識する。選択部は、主要被写体に応じた複数の測定点を選択する。第1算出部は、選択部が選択した測定点ごとに、各々の測定点に対し距離を算出する。第2算出部は、第1算出部が算出した各々の距離に応じて主要被写体の大きさを示すサイズ情報を算出する。記録処理部は、撮像部が生成する記録用の第2画像とサイズ情報とを関連付けてメモリに記録する。
(もっと読む)
画像解析による管腔形成試験の評価方法および評価装置
【課題】管腔形成試験で撮影された培養細胞画像から作用させた物質について、50%阻害濃度が簡易に得られる管腔形成阻害作用の評価方法および装置を提供する。
【解決手段】評価対象画像データから網目領域を抽出し、各網目領域の面積と数を計測する段階と、網目領域の属性評価項目を計測する段階と、濃度別に各評価項目の管腔形成能を相対値として算出する段階と、評価項目数に応じて放射状に伸びた軸上に、前記算出された管腔形成能の相対値をプロットして、濃度別にレーダーチャートを作成する段階と、前記濃度別のレーダーチャートの原点とプロットした点までの距離によって算出したチャート多角形の大きさと歪みに基づいて管腔形成能を合算し、濃度別に合算値である管腔形成能を算出する段階と、算出した濃度別の合算値である管腔形成能をシグモイド曲線へ当てはめて濃度依存的阻害曲線と50%阻害濃度を算出する段階とを備えたことを特徴とする。
(もっと読む)
乗物用シート
【課題】乗物用シートの剛性を低下させることなく、着座した乗員の体格を検知可能な乗物用シートを提供する。
【解決手段】乗員が背中を凭せ掛けるシートバック部20と、乗員が腰を下ろすシートクッション部30とを備え、シートバック部20またはシートクッション部30の少なくとも一方は枠部22を有しており、枠部22に2重となるように取り付けられる伸縮性を有する網状の表皮23と、シートバック部20またはシートクッション部30に対して乗員の反対側に配置されているとともに乗員が着座することで表皮に浮き出た模様を撮像する撮像手段Ca、Cbと、撮像した模様に基づいて着座している乗員の体格を判定する処理手段Cuとを備えている。
(もっと読む)
表面検査装置、表面検査方法およびフィルムの製造方法
【課題】
被検査面が円筒側面形で鏡面反射性を有し、円筒中心軸に対して回転する前記被検査面に対応する曲率および前記被検査面の位置の少なくとも一方が経時的に変化する被検査体表面に発生する微小な凹凸欠点を精度よく検出できないという問題点を解決する。
【解決手段】
被検査体に明暗パターンの光を照射する光照射手段と、前記被検査体から反射した前記明暗パターンを撮像する撮像手段と、前記撮像手段で撮像した前記明暗パターンを含む撮像画像に基づいて前記被検査体の表面を検査するデータ処理手段とを備える表面検査装置であって、データ処理手段が、撮像手段により連続で撮像された2枚の画像から、各画像内の明暗パターン領域を比較することにより、微小な凹凸欠点を高精度に検出できる。
(もっと読む)
ワイヤーボンドの三次元位置決め方法及び装置
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
仮組み用ワイヤ残留検出装置および仮組み用ワイヤ残留検出方法
【課題】仮組み用ワイヤ残留の検出精度を高める。
【解決手段】熱交換器のチューブ2を照明する照明手段と、チューブ2を撮影する撮影手段と、撮影手段が撮影した画像を処理する画像処理手段とを備え、照明手段は、熱交換器に仮組み用ワイヤ6が残留している場合、チューブ2に仮組み用ワイヤ6の影Sが映るように配置され、撮影手段は、熱交換器に仮組み用ワイヤ6が残留している場合、チューブ2に映った仮組み用ワイヤ6の影Sを撮影できるように配置され、画像処理手段は、チューブ2に仮組み用ワイヤ6の影Sが映っているか否かを判定する。
(もっと読む)
工具形状測定装置、及び工具形状測定方法
【課題】 加工工具や工具保持機構の寸法を安価且つ簡便な装置構成で測定できる工具形状測定装置を提供する。
【解決手段】 本発明の工具形状測定装置は、中心軸4aの周りに回転可能な加工工具1及び加工工具1を保持する工具保持機構を撮像して撮像画像を得るカメラ5と、撮像画像から加工工具1及び/又は工具保持機構の寸法を示す寸法データを生成する寸法データ生成部13とを具備する。カメラ5は、その光軸5aが前記中心軸4aと垂直に交わるように位置している。寸法データ生成部13には、光軸5aと垂直であり且つ中心軸4aを含むように規定された基準平面Sからカメラ5までの距離である基準距離Lと、撮像画像の上における単位長さと基準平面Sの上の長さとの対応を表す対応データとが設定され、寸法データ生成部13は、撮像画像と、基準距離Lと、対応データとを用いて前記撮像画像の遠近誤差を補正して寸法データを生成する。
(もっと読む)
透明基板の検査装置、透明基板の検査方法、及びガラス基板の製造方法
【課題】ガラス基板や透明な樹脂基板等を含む透明基板の検査を効率化できる透明基板の検査装置、透明基板の検査方法、及び前記透明基板の検査方法でガラス基板を検査する検査工程を有するガラス基板の製造方法を提供する。
【解決手段】検査装置10は、透明基板72の断面及びその周辺部に、斜め方向から光を照射する照明手段11aと、前記照明手段11aから照射された光の透過光を受光し、前記断面の画像を撮像する撮像手段12aと、前記撮像手段12aが撮像した前記断面の画像に基づいて、前記断面の面積を算出する画像処理手段13と、を有する。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 低倍率視野内のワークを高倍率視野内へ自動搬送してワークの寸法を高い精度で測定することができる寸法測定装置を提供する。
【解決手段】 XY方向に移動可能な可動ステージ12と、特徴量情報及び測定箇所情報を保持する測定設定データ記憶手段と、ワークWを低倍率で撮影し、低倍率画像を生成する低倍率撮像手段と、特徴量情報に基づいて、低倍率画像におけるワークWの位置及び姿勢を特定するワーク検出手段と、特定された位置及び姿勢に基づいて、ワークWの測定対象箇所が高倍率視野内に収まるように、可動ステージ12を制御するステージ制御手段と、高倍率視野内に移動した測定対象箇所を高倍率で撮影し、高倍率画像を生成する高倍率撮像手段と、測定箇所情報に基づいて、高倍率画像から測定対象箇所のエッジを抽出するエッジ抽出手段と、抽出されたエッジに基づいて、測定対象箇所の寸法値を求める寸法値算出手段により構成される。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 ワークの寸法を高い精度で測定することができるとともに、被写界深度を越える段差を有するワークであっても、測定対象とする箇所を容易に設定することができる寸法測定装置を提供する。
【解決手段】 可動ステージ12上のワークWを撮影する撮像手段と、可動ステージ12のZ方向の位置が異なる複数のワーク画像を深度合成し、深度合成画像を生成する深度合成手段と、マスターピースを撮影して得られる深度合成画像をマスター画像M1として画面表示するマスター画像表示手段と、マスター画像M1に対し測定対象箇所及び測定方法を指定し、測定箇所情報を生成する測定箇所情報生成手段と、測定箇所情報に基づいて、ワークWを撮影して得られた深度合成画像から測定対象箇所のエッジを抽出するエッジ抽出手段と、抽出されたエッジに基づいて、測定対象箇所の寸法値を求める寸法値算出手段により構成される。
(もっと読む)
3次元寸法測定装置
【課題】本発明の目的は、画像を用いた測定において、1枚の画像に納まりきらない程の高い倍率で画像を取得する際にも、容易な操作で画像を取得でき、かつ、寸法を算出する際に、1枚の画像に納まりきらない程の高い倍率で撮影した画像を用いることで、1枚の画像に納まりきる画像から寸法を算出するよりも高い精度で寸法を算出可能な装置を提供することにある。
【解決手段】本発明は、ワイドカメラの画像からワークの輪郭を抽出し、抽出された輪郭情報に基づき、駆動機構の走査軌跡および、複数のカメラの撮像倍率を決定し、決定された走査軌跡を走査中に、複数のカメラから複数枚の画像を取得し、複数枚の画像を合成して、高倍率の画像を生成し、生成された高倍率画像から高精度に輪郭の寸法を求めることを特徴とする。
(もっと読む)
画像処理方法、プログラム、および画像処理装置
【課題】計測時の手間を低減する。
【解決手段】CPU34cは、ブレードを撮像した動画像を構成する第1のブレード画像からテンプレート画像を抽出する。CPU34cは、第1のブレード画像とテンプレート画像とを比較し、第1のブレード画像の中から、テンプレート画像におけるブレードの姿勢と一致する姿勢のブレードを含む第2のブレード画像を抽出する。CPU34cは、予め算出された3次元形状を有する物体の画像をテンプレート画像に重畳した第1の画像を表示部に表示し、テンプレート画像におけるブレードの姿勢に一致するように、第1の画像における物体の姿勢を制御する。CPU34cは、この物体の画像を第2のブレード画像に重畳した第2の画像を表示部に表示する。CPU34cは、第2の画像における物体上の計測点の3次元座標を算出し、算出した3次元座標に基づいて、物体のサイズを算出する。
(もっと読む)
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
表面検査方法および表面検査装置
【課題】繰り返しパターンの線幅の測定精度を向上させた表面検査方法を提供する。
【解決手段】所定の繰り返しパターンを有するウェハの表面に直線偏光を照射する照射ステップ(S102)と、直線偏光が照射されたウェハの表面からの反射光を受光する受光ステップ(S103)と、対物レンズの瞳面と共役な面において、反射光のうち直線偏光の偏光方向と垂直な偏光成分を検出する検出ステップ(S104)と、検出した偏光成分の階調値から繰り返しパターンの線幅を求める演算ステップ(S105)とを有し、演算ステップでは、瞳面における対角線上の瞳内位置および対角線外の瞳内位置での階調値から、繰り返しパターンの線幅を求める。
(もっと読む)
41 - 60 / 664
[ Back to top ]