
Fターム[2F065AA21]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606)
Fターム[2F065AA21]の下位に属するFターム
Fターム[2F065AA21]に分類される特許
21 - 40 / 664
干渉計方式により間隔測定するための機構
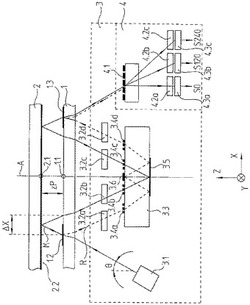
【課題】十分に平行に配設された二つのプレート間で、高精度で干渉計方式により間隔測定するための機構を提供する。
【解決手段】光源3.1から発せられた光束が、第一プレート1にある分光器要素1.2に傾斜して当たり、そこで反射される参照光束と透過する測定光束に分割される。測定光束は第二プレート2にあるリフレクタ要素2.2に当たり、そこで第一逆反射を受ける。参照光束は第一屈折要素3.2aを、測定光束は第二屈折要素3.2bを通過し、二つの光束は引き続いて、それぞれ関連配置された逆反射器3.3を通過して、測定光束は第三屈折要素3.2cを、参照光束は第四屈折要素3.2dを通過する。そして参照光束は第一プレート1で反射を、測定光束は第二プレート2のリフレクタ要素2.2で第二逆反射を受け、それにより二つの光束が、共直線で検知ユニット3の方向に伝播し、そこで位相がずれた複数の走査検知信号を生成することができる。
(もっと読む)
動き検出装置

【課題】移動する測定対象物が加速、減速した場合であっても該測定対象物の速度を高精度に測定することが可能な動き検出装置を提供する。
【解決手段】撮像部11で撮像される画像の各画素に、測定対象物の測定対象物が存在した場合に、投票値を付与する。そして、積算された投票値が増加する場合には、測定対象物は減速しているものと判断し、他方、積算された投票値が減少する場合には、測定対象物は加速しているものと判断する。そして減速している場合には、特徴領域に対応する画素の投票値に、所定の補正値を加算することにより、実際の速度を反映した投票値に補正する。また、減速している場合には、特徴領域に対応する画素の投票値から所定の補正値を減算することにより、実際の速度を反映した投票値に補正する。
(もっと読む)
寸法測定装置、シール面間寸法測定装置およびシール面間寸法測定方法
【課題】自動車のドア側のシール面とボディー側のシール面との間のシール面間寸法を正確かつ短時間で測定する。
【解決手段】少なくとも片面に配置された複数のターゲットマーク13を表にして車両のボディー側に取り付けるボディー側ターゲットボード11と、両面に配置された複数のターゲットマークが表裏から見えるように車両のドア側に取り付けるドア側ターゲットボード12と、車両のボディー側のシール面およびドア側のシール面にレーザ光を照射するレーザ光照射部22と、ターゲットボード11、12を撮影するステレオカメラ23と、撮影したレーザ光からボディー側およびドア側のシール面の断面形状を認識し、撮影したターゲットマーク13を用いてボディー側およびドア側のシール面の断面形状を一致させるように移動させ、ボディー側のシール面とドア側のシール面との間のシール面間寸法を測定する画像処理部30と、を有する。
(もっと読む)
パターン検査装置及びパターン検査方法
【目的】マスクに形成されたパターン自体の位置精度の均質性を検査可能な検査装置を提供する。
【構成】検査装置100は、離散的な領域を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、対応する参照画像中の図形の寸法との間での第1の位置ずれ量を用いて、被検査領域全体における第1の位置ずれ量マップを作成するマップ作成回路131と、検査領域全体を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、それぞれ対応する参照画像中の図形の寸法との間での第2の位置ずれ量を用いて、被検査領域全体における第2の位置ずれ量マップを作成するマップ作成回路132と、第2の位置ずれ量マップを、第1の位置ずれ量マップと第2の位置ずれ量マップとの第1の差分マップで補正した第3の位置ずれ量マップに定義される各値のうち、許容値を超える値の有無を判定する判定回路156と、を備えたことを特徴とする。
(もっと読む)
鉄筋規格判別装置及び鉄筋規格情報作成装置
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】携帯端末4は、鉄筋の画像から、背景板Bに対して垂直方向の1ピクセルずつの位置に対応する連続的な径長を抽出する(S1001)。次に、抽出した鉄筋径分布の全データのうち、上部5%のデータと、下部5%のデータとをノイズとして除去する(S1002)。そして、中央部90%のデータにおける最大値を特定し、最大径d1として取得する(S1003)。続いて、鉄筋規格情報452を参照し(S1004)、最大径d1に対応する鉄筋規格を特定できるか否かを判定する(S1005)。鉄筋規格を特定できる場合には(S1005のYES)、該当した鉄筋規格を取得する(S1006)。該当する鉄筋規格を特定できない場合には(S1005のNO)、その旨をオペレータに通知することにより、角度を変えて鉄筋を再度撮影し、画像を抽出し(S1007)、S1001の処理から再試行する。
(もっと読む)
貨物自動車寸法測定装置、及び貨物自動車寸法測定方法
【目的】カメラやレーザー等の光学系手段を用いて測定効率の向上に貢献する手段を利用しつつ、さらに測定精度が高く、貨物自動車に関する的確なデータ管理が可能な貨物自動車寸法の測定装置及び測定方法とする。
【構成】貨物自動車の製造施設において、反射部を有するターゲット部と、所定位置に固定でターゲット部に反射される光を出力する複数の光学系手段と、反射光でターゲット部の座標位置を決定して貨物自動車の寸法を算定する制御部がある。ターゲット部の一部は、貨物自動車後方の灯火部に取り付けられている。光学系手段は、灯火部用のターゲット部に光を出力する灯火部用光学系手段を含む。ターゲット部の反射光データは制御部に入力され、貨物自動車の全長、全幅又は全高の少なくとも一つが算定され、灯火部用光学系手段の撮影データに基づいて灯火部の取り付け位置が算定される。
(もっと読む)
検査装置、リソグラフィ装置、リソグラフィプロセシングセルおよび検査方法
【課題】回折次数の重なりを防止しつつ基板の特性を精度良く求める技術を提供する。
【解決手段】角度分解分光法に対しては、4つのクアドラントを有する照明プロファイルを有する放射ビームが使用される。第1および第3クアドラントが照明される一方、第2および第4クアドラントは照明されない。したがって、結果として生じる瞳面は4つのクアドラントに分けられ、ゼロ次回折パターンのみが第1および第3クアドラントに現れて一次回折パターンのみが第2および第3クアドラントに現れる。
(もっと読む)
三次元計測システム及び三次元計測方法
【課題】ロボットの座標系に依存しない、三次元計測システムを提供する。
【解決手段】計測対象の三次元形状を計測する三次元計測器20と、この三次元計測器20を移動させるロボット10と、ロボット10を駆動制御するロボット制御装置30と、を備えた三次元計測システム1であって、ロボットのアーム先端に固定され三次元計測器を支持したベースプレート60と、ベースプレートに固定された三次元計測器20の傾きを計測するロボット計測装置40と、ワーク計測箇所の座標及びワークの形状寸法を算出するデータ処理装置50と、を備えている。
(もっと読む)
ツインロータリ圧縮機の中間プレートの検査装置
【課題】単品状態および圧縮部に組み込まれた状態における分割面の隙間を測定することができるツインロータリ圧縮機の中間プレートの検査装置を提供する。
【解決手段】検査装置は、単品の中間プレート5の分割面同士を突き合わせるための右スライドシリンダ47a等、突き合わせられた分割面隙間Cを測定するためのLED光源27および画像センサ36、中間プレート5の外径を測定するためのリニアセンサ61等を具備する第一検査装置100と、組み込まれた状態の中間プレート5の分割面同士を突き合わせて、中間プレート5の外径を測定するための第二検査装置200と、第一検査装置100が測定した分割面隙間Cが無い状態における中間プレート5の外径である単体隙間合計値E5と、第二検査装置200が測定した中間プレート5の外径である組立隙間合計値E15とを比較する制御装置300と、を有する。
(もっと読む)
寸法測定装置、寸法測定方法および寸法測定プログラム
【課題】対象物の寸法を簡易かつ高精度に測定する寸法測定装置を提供する。
【解決手段】寸法測定装置は、取得部18aと、登録部18bと、表示制御部18cと、寸法算出部18eとを備える。取得部は、撮像部14により撮像される対象物と自装置とが接触した状態における撮像部の傾斜である接触傾斜を取得する。登録部は、撮像部により対象物の画像が撮像される際に、撮像部から対象物までの距離と撮像部の傾斜とを取得し、取得した距離および傾斜を対象物の画像ごとに対応付けて画像情報記憶部17bに登録する。表示制御部は、接触傾斜に対応する対象物の画像および距離を画像情報記憶部から抽出し、抽出された対象物の画像とともに対象物の画像に重畳される一対の枠を表示部12に表示させる。寸法算出部は、表示制御部により表示部に表示された枠の表示位置および接触傾斜に対応する距離に基づいて対象物の寸法を算出する。
(もっと読む)
マクロ検査装置
【課題】被検査物の表面の凹凸パターンのサイズ変動を検査するマクロ検査装置を提供する。
【解決手段】被検査物2の表面の凹凸パターンのサイズ変動を検査するマクロ検査装置100である。マクロ検査装置100は、被検査物2を乗せるためのステージ1と、被検査物2の表面に対して所定の角度方向から被検査物2側に光を照射する拡散光源5と、被検査物2の表面からの反射光を受光可能なラインセンサ9と、被検査物2とラインセンサ9との間に設けられ、反射光のうち拡散光源5のエッジ部からの光束に起因する反射光束が、ラインセンサ9の両端の少なくとも一方に設けられた所定領域でのみ受光されるように、反射光をラインセンサ9に導くための光学系と、を備える。
(もっと読む)
形状測定装置
【課題】安価でかつ幅方向に高い分解能を有することができ、高精度に被測定物体の形状を測定可能にする。
【解決手段】被測定物体1の搬送方向に対し垂直な平面内であってその斜め上方または下方に配置されスリット状光を照射するスリット状光光源2a,2bと、被測定物体1を介しスリット状光光源2a,2bと反対側となる被測定物体1の斜め上方または下方であって、被測定物体1の表面1aまたは裏面1b上に照射されたスリット状光をその照射方向に対し所定の角度だけずれた方向から撮像する撮像部3a,3bと、撮像部3a,3bが撮像した被測定物体表面1aおよび裏面1bの撮像画像の座標を、撮像部3a,3bがスリット状光光源2a,2bからの照射線上で撮像したように変換する座標変換部4a,4bと、その座標変換された撮像画像の座標に基づいて、被測定物体1の断面厚み形状を演算する断面厚み形状演算部5とを有する。
(もっと読む)
センサ角度の測定方法
【課題】簡便な構成により曲折部における加工品位を向上させることができるセンサ角度の測定方法を提供する。
【解決手段】ワーク3上の各教示点Pi及び対応する追加点Qiにセンサ4を順次位置させ、センサ4でワーク3までの距離を計測して各教示点Piにおけるセンサ4のワーク3に対する角度を測定する際に、溶接線13がワーク3の曲折部10の前後にわたる場合、各教示点Piに対応する追加点Qiを、教示点Piが、曲折部10に至る直前の加工ライン13についての最後の教示点Pmでない場合には当該教示点Piの前方に位置させ、最後の教示点Pmである場合にはその後方に位置する追加点Qmとする。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
投影装置およびその方法、並びに投影装置を用いた形状認識装置およびその方法
【課題】配置の制約が少なく、かつ照度不足および照度ムラが生じにくい投影装置を提供する。
【解決手段】撮像部の撮像対象物に対して光を投影する投影装置200であって、放射する光の波長帯が互いに異なる赤色LED240R、緑色LED240Gおよび青色LED240Bと、撮像対象物の特性に基づき、各LEDが放射する光の光量を制御する投影制御部230と、複数のLEDから放射される光を、同一の光軸上に導くことにより、撮像対象物に対して光を投影するリレー部250とを備える。
(もっと読む)
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
膜厚分布測定装置および塗膜形成装置
【課題】生産性を低下させることなく、帯状基材に塗膜を精度よく形成することができる塗膜形成装置を提供する。
【解決手段】塗膜形成装置は、帯状基材10を搬送するローラ70と、帯状基材10の長さ方向に塗膜を形成する塗工部とを備えた塗膜形成装置である。この装置は、帯状基材10の幅方向に沿って一直線上に配置された複数の変位センサ20A、20Bと、複数の変位センサ20A、20Bを帯状基材10の幅方向に走査させることによって、帯状基材10に形成された塗膜12の膜厚分布を測定する膜厚分布測定部100と、膜厚分布測定部100で測定された塗膜12の膜厚分布に基づいて、塗工部によって帯状基材10に形成される塗膜12の位置、塗膜の幅および塗膜の厚さをそれぞれ制御する制御部とを備える。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
Hilbert位相画像処理のためのシステムと方法
【課題】細胞内で起こる高速現象を測定する装置を提供する。
【解決手段】ヒルベルト位相顕微鏡を使用し、透光性物体に関連した高解像度位相情報から、一フレーム毎の形状、体積のようなパラメータを得、ミリ秒の時間スケールで取得した多数の画像をもとに、ダイナミックな変動をナノメートルオーダーの分解能で定量化する。
(もっと読む)
面形状計測装置および面形状計測方法
【課題】光学系にアラインメント誤差が存在しても、被検面の形状を高精度に計測する。
【解決手段】面形状計測装置は、光源1からの光を被検面に照射する投光光学系6と、被検面で反射された光を結像させる結像光学系6と、結像光学系により結像された光を受光するセンサ11と、該センサからの出力を用いて被検面の形状を計測する計測手段12とを有する。計測手段は、光源から投光光学系を介して校正基準面8に照射され、該校正基準面で反射されて結像光学系を介してセンサに入射した光の波面の曲率半径を該センサからの出力を用いて算出し、該曲率半径を用いて結像光学系の焦点距離を算出し、該焦点距離を用いて、結像光学系に対してセンサと共役関係となる共役位置を算出し、焦点距離と共役位置とから結像光学系の結像倍率を算出する。さらに、共役位置に被検面を配置したときのセンサからの出力と該結像倍率とを用いて被検面の形状を計測する。
(もっと読む)
21 - 40 / 664
[ Back to top ]