
Fターム[2F065AA21]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606)
Fターム[2F065AA21]の下位に属するFターム
Fターム[2F065AA21]に分類される特許
161 - 180 / 664
被写体寸法測定用カメラ装置

【課題】 本発明は、電子カメラで被写体や現場状況の撮像を行いながら被写体をズームアウト(縮小)したり、ズームイン(拡大)したりして撮像しても正確にかつ簡便に被写体の大きさや寸法を測定する装置および方法の提供を課題とする。
【解決手段】 被写体寸法の測定または比較機能付カメラ装置において、複数のビーム光源と、該複数のビーム光源は前記カメラの光軸と並行して発光ビームを照射するよう所定距離だけ離間して前記カメラに装着されていることを特徴とする。
(もっと読む)
高温ガラス容器の品質を向上させ、成形プロセスを制御するために、高温ガラス容器をモニタリングするシステムおよび方法

【課題】高温ガラス容器の品質をモニタリングし、向上させ、制御することを可能にするために、高温ガラス容器がそれらを製造するI.S.機から流れるときに、ホットエンドにおいて高温ガラス容器をモニタリングするシステムおよび方法を提供すること。
【解決手段】そのシステムは、高温ガラス容器からの放射をモニタリングし、各高温ガラス容器の画像を抽出し、高温ガラス容器の画像を分析し、その高温ガラス容器の画像を容器の品質を示す情報と一緒に操作者が視認できる表示画面に提示して、ガラス成形プロセスの偏差をすぐに識別可能にし、ガラス容器の品質を連続して改善する。そのシステムおよび方法は、以前に知られた、高温ガラス容器をモニタリングする試みを妨げる条件およびパラメータと関係がなく、ガラス容器の生産の品質を高くし、かつ均質性を実質的に向上させることを可能にする。
(もっと読む)
カメラ及び検索パターンを使用して対象物の空間特性を決定するためのシステム、装置、方法、及びコンピュータプログラム製品
【課題】対象物ホルダの上面に配置した対象物を評価するためのシステム、装置、方法、及びコンピュータプログラム製品を提供する。
【解決手段】対象物ホルダ110を複数位置の各々に位置させながら、対象物102の取得部分の一部を現す少なくとも1つの第一フレームを取得する。対象物ホルダ110を各位置に位置させながら、対象物ホルダ110の少なくとも一つの別の面の取得部分を現す少なくとも1つの第二フレームを取得する。取得したフレームのうち少なくとも1つのフレームに基づいて、対象物102の取得部分に関連した少なくとも一つの空間特性を決定する。各第二フレームにおいて取得した複数の光学マーカーの値を決定する。ここで、少なくとも上記光学マーカーのうち少なくとも2つはそれぞれ異なった値を有する。少なくとも一つの異なる面の上記取得部分の値及び向きに関連した少なくとも一つの座標が決定される。
(もっと読む)
試験対象物の幾何学的特性を測定する方法及び装置、並びに光プロファイリング・システム
【課題】試験対象物の第1及び第2表面を干渉法によってプロファイルすることに加えて、第1基準面と第2基準面との間の空間的関係に基づき、試験対象物の幾何学的特性を測定する。
【解決手段】本発明は、試験対象物の幾何学的特性を測定するための方法を特徴とする。この方法は、第1基準面に対して、試験対象物の第1表面を干渉法によってプロファイルする工程と、第1基準面とは異なる第2基準面に対して、試験対象物の第2表面を干渉法によってプロファイルする工程と、第1基準面と第2基準面との間の空間的関係を提供する工程と、干渉法によってプロファイルした表面、並びに第1基準面と第2基準面との間の空間的関係に基づいて、試験対象物の幾何学的特性を計算する工程とを含む。ある実施形態では、この空間的関係は、校正済みのゲージ・ブロックを使用することによって、または変位測定干渉計を使用することによって測定することができる。対応するシステムも説明される。
(もっと読む)
寸法重量測定装置及び寸法重量測定方法
【課題】搬送中の貨物の寸法及び重量を高精度に測定できる寸法重量測定装置を提供する。
【解決手段】搬送路上を移動する貨物Aの寸法と重量とを測定する装置であり、搬送方向と直交する方向に複数の受光センサを配列し、貨物Aに投影した平行光束を受光センサで受光して、貨物Aに遮光されて受光できない遮光受光センサの位置を検出する光学ゲート50と、貨物Aの搬送距離を検出する搬送距離検出手段12と、搬送距離が所定量増加するごとに、光学ゲート50の遮光受光センサの位置を記憶し、この動作を貨物Aが光学ゲート50を通過するまで繰り返すメモリと、貨物Aが光学ゲート50を通過した後、メモリに記憶されたデータに基づいて貨物Aの寸法を算出する寸法測定手段と、搬送路上を移動する前記貨物の重量を測定する重量測定手段とを備える。この装置は、貨物Aの搬送速度の影響を受けずに、貨物Aの寸法及び重量を高精度に測定できる。
(もっと読む)
被覆電線検査装置及びこれを備えた電線処理機
【課題】被覆が剥離された被覆電線端部の良否を的確に検査することのできる被覆電線検査装置及び電線処理機を提供する。
【解決手段】被覆が剥離された被覆電線Dの端部Tの状態を検査する被覆電線検査装置Aであって、被覆が剥離された芯線Sの端面Tを撮像する第1撮像手段3aと、被覆が剥離された芯線Sの側面を撮像する第2撮像手段3bと、前記各撮像手段3a、3bにより撮像された画像に基づいて前記剥離の良否を判定する判定手段9とを備えている。
(もっと読む)
溶接部検出方法
【課題】ワークの溶接部の検出に要する時間を短縮できるとともに、低コストで溶接部の検出を行うことができる溶接部検出方法を提供する。
【解決手段】ワークの溶接部Yを検出する溶接部検出方法であって、ワーク100の伸長量とくびれの幅Lとの相関と、ワークの板幅Hおよび板厚Dの少なくとも一方のワーク100の伸長前後における変化量とくびれの幅Lとの相関とのうち、少なくとも一方の相関を予め求めておき、伸長量および変化量とくびれの幅Lとの相関が求められているワーク100の伸長量、板幅H、および板厚Dを取得することにより、相関に基づいて、くびれの幅Lを算出する算出工程と、算出工程で算出されるくびれの幅Lに応じて、搬送速度V2を設定する設定工程と、設定工程で設定される搬送速度V2でワーク100を搬送しながら、所定の間隔でワークの板幅Hを測定することにより、くびれ101を検出する検出工程とを含む。
(もっと読む)
表面検査方法および表面検査装置
【課題】フォーカス異常とドーズ量異常を区別して検出することが可能な表面検査方法を提供する。
【解決手段】所定の繰り返しパターンを有するウェハの表面に直線偏光を照射する照射ステップ(S104)と、直線偏光が照射されたウェハの表面からの反射光を受光する受光ステップ(S105)と、対物レンズの瞳面と共役な面において、反射光のうち直線偏光の偏光方向と垂直な偏光成分を検出する検出ステップ(S106)と、検出した偏光成分の階調値から繰り返しパターンの線幅および露光時のフォーカス状態を求める演算ステップ(S107)とを有し、演算ステップでは、瞳面において線幅との相関が高い瞳内位置での階調値から線幅を求めるとともに、フォーカス状態との相関が高い瞳内位置での階調値からフォーカス状態を求める。
(もっと読む)
連続部品の検査方法、連続部品の検査プログラムおよび連続部品の検査装置
【課題】プレス加工等により所定の繰り返しピッチで複数個が帯状の材料に加工された連続部品に対する検査技術を提供する。
【解決手段】連続部品の検査方法は、正常品である連続部品の画像を取得する画像取得手順S1と、その画像から垂直エッジを検出してエッジピッチを求め、エッジピッチのヒストグラムを作成するエッジピッチヒストグラム作成手順S6と、連続部品の繰り返しピッチである基準ピッチを求める基準ピッチ算出手順S7と、連続部品が存在する画像領域の上限と下限を求め、その間の領域で基準ピッチ内に単一の部品が納まる画像領域を切り出すテンプレート領域抽出手順S8と、切り出された画像領域をテンプレートとして登録するテンプレート登録手順S9と、検査対象の連続部品の画像を取得し、テンプレートと基準ピッチとを用いて良否を判定する検査手順とを備える。
(もっと読む)
グレージングユニットの品質を分析する方法
本発明に記載のグレージングユニットの品質を分析する方法は、
グレージング(2)の外側表面による反射によって生成されるテストチャート(4)のデジタル画像を生成するステップであり、テストチャート(4)が、インターフェースライン(13)を間に規定する複数のコントラスト要素(12)から成るパターンを示すステップと、
生成される画像からグレージング(2)を代表する量を計算するステップであり、計算が、処理ユニット(8)によって行われるステップと、
基準値に対して代表値の計算値を比較するステップと
を含む。
代表的な量は、グレージング(2)の外側表面による反射によって生成されるテストチャートの画像の歪みを代表する。 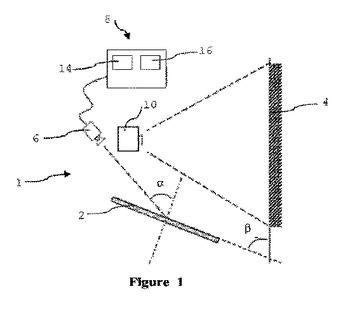 (もっと読む)
(もっと読む)
基板上のオブジェクトの概略構造を決定する方法、検査装置及び基板
あるシステム及び方法が、再構築により、基板上のオブジェクトの概略構造を決定する。これは、例えば、リソグラフィ装置のクリティカルディメンション(CD)又はオーバレイ性能を評価するための微細構造のモデルベースのメトロロジーなどに適用できる。基板上のスタック上の格子などのオブジェクトの概略構造を決定するためにスキャトロメータが使用される。ウェーハ基板は上層と下地層とを有する。基板はスタックオブジェクト上の格子を含む第1のスキャトロメトリターゲット領域を有する。スタック上の格子は上層と下地層とからなる。上層は周期格子のパターンを備える。基板はさらに、上層がない、隣接する第2のスキャトロメトリターゲット領域を有する。第2の領域は、パターン形成されていない下地層のみを有する。 (もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】リソグラフィ装置の処理能力を大きく損なうことなく、重ね合わせ精度を向上させる方法及び装置を提供する。
【解決手段】露光条件を最適化するために基板の露光時に基板上の位置合わせ標識を検査する。基板10が露光及び位置合わせユニット15の真下で走査を受けるとき、基板のそれぞれの部分が最初に検出器ユニット16の下方を通過し、次いで露光ユニット17の下方を通過する。したがって、基板10のそれぞれの部分に関して検査器ユニット16によって測定された、直線位置、配向、及び膨張に関する情報が露光ユニット17に伝達可能であり、基板が露光ユニット17の真下を通過しながら基板が露光されるとき、基板の当該部分に関する露光条件を最適化することができる。
(もっと読む)
高速高解像度三次元太陽電池検査システム
光学検査システム及び方法が提供される。加工対象物輸送機構が加工対象物(12)をノンストップで移動させる。照明装置(40)が、ライトパイプを含み、第一及び第二のストロボ照明野タイプを提供するように構成されている。第一(3)及び第二(5)のカメラ(2)アレイが、加工対象物(12)の立体画像化を提供するために配設されている。第一のカメラアレイ(3)は、第一の照明野を用いて加工対象物(12)の第一の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第二の複数の画像を生成するように構成されている。第二のカメラアレイ(5)は、第一の照明野を用いて加工対象物(12)の第三の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第四の複数の画像を生成するように構成されている。処理装置が、第一、第二、第三及び第四の複数の画像の少なくともいくつかを記憶し、他の装置に提供する。 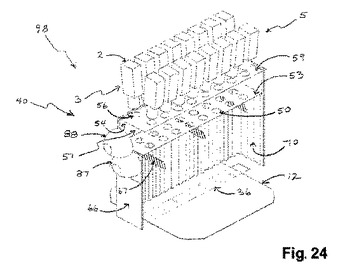 (もっと読む)
(もっと読む)
単一光源と平面センサ部とを用いて物体の物理量を測定する方法およびこれを用いる仮想ゴルフシステム
単一光源と平面センサ部とを用いて物体の物理量を測定する方法およびこれを用いる仮想ゴルフシステムを提供する。本発明の一態様によれば、単一光源と平面センサ部とを用いて物体の物理量を測定する方法であって、前記単一光源から放出される光によって生成される前記物体の影を、前記平面センサ部で検出する(前記平面センサ部は、前記単一光源に対向する底面に配置されている)ステップと、前記影に関する情報に基づいて、前記物体の物理量を測定するステップとを含む方法が提供される。  (もっと読む)
(もっと読む)
フォームファクタが小さいサイズセンサ
本明細書で開示される主題は、モバイル機器から遠隔の物体までの距離を測定すること、または遠隔の物体のサイズを測定することに関する。 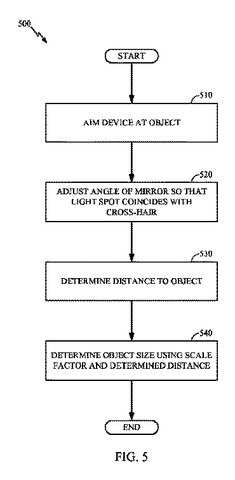 (もっと読む)
(もっと読む)
ノズルギャップ測定装置
【課題】ノズルに傷がつくことを防止しつつ、高精度かつ高効率にノズルギャップの測定を行うことができるノズルギャップ測定装置を提供すること。
【解決手段】センサ装置130から光ビームX1を照射し、ノズル22と被照射面110aとで反射した反射光X2を受光して、ノズル22と被照射面110aとの間のギャップを測定することで、ノズルギャップを測定することができる。このように、光ビームX1を用いて非接触状態でノズルギャップを測定することができるので、ノズル22に傷がつくことを防止することができる。また、当接面120aをホルダ23の底面23aに当接させることで、ノズルギャップを測定可能な状態とすることができるので、センサ装置130の設置や測定に要する時間を短縮して、高効率に測定することができると共に、測定者の個人差による測定精度のばらつきを回避して、高精度に測定することができる。
(もっと読む)
リソグラフィ装置、歪み決定方法およびパターニングデバイス
【課題】パターニングデバイスの高次歪みの結果として生じるオーバーレイエラーが低減されたリソグラフィ装置を提供することが望ましい。
【解決手段】本発明は、パターンをパターニングデバイスから基板上に転写するように構成されたリソグラフィ装置に関連し、パターニングデバイスの高次歪みおよび/または像面偏差を測定するように動作可能であり、透過イメージ検出用デバイスと、透過イメージ検出用デバイスから受け取った信号を使用してパターニングデバイスの高次歪みをモデル化するように構成され配置されたプロセッサとを備え、前記パターニングデバイスが主結像フィールドおよび外辺部を有し、前記装置が、前記外辺部および/または結像フィールド内に備えられた位置合わせ構造物から生じた信号を使用して前記高次歪みをモデル化するように動作可能である。
(もっと読む)
インスペクション方法
【課題】プロファイル及びそのバリエーションをユーザが設定するのを手助けするシステムを提供する。
【解決手段】既知のオブジェクトのイメージ42を取り込むこと、及び、このイメージ上に、手動又は自動によって推定プロファイル20を重畳すること、を含む。推定プロファイルは数学的に定義され、かつ、上記イメージと一致するようにセグメント毎に調節される40ことによって、調節された推定プロファイルが、上記イメージに関連する当該回折スペクトルとともに記憶される。あるいは又はこれに加えて、ユーザは、既知のイメージのプロファイルをトレース(又は自由描写)し、その後、多項式、スプライン、又はベクトル等の数学関数の形状定義物を推定プロファイル上に描くことにより、未知のオブジェクトのプロファイルをその回折パターンから再構成する際に使用し得る。
(もっと読む)
ロボット追従式画像検査装置、ロボット追従式画像検査方法及びロボット追従式画像検査に用いるコンピュータプログラム
【課題】設置場所における外部からの光の影響を受け難く、外部からの光の影響を避けるための調整を必要としない、画像検査装置、画像検査方法及び画像検査に用いるコンピュータプログラムを提供する。
【解決手段】画像検査装置は、ガラス140上のウレタン塗布領域に塗布されたウレタン144に赤外線を照射する赤外線照射装置120と、ウレタン144を撮影する赤外線撮影装置116とが取り付けられたロボットハンド112を備え、ロボットハンド112はウレタン塗布領域に沿って設定された経路上を移動することができる構成とされている。そして、ロボットハンド112が前記径路上を移動する際に、赤外線照射装置120によって赤外線が照射されたウレタン144を、赤外線撮影装置116により連続撮影して画像を取得し、赤外線撮影装置116により取得した画像によりウレタン144の塗布状態を検査する。
(もっと読む)
半導体ウェハの検査及び処理方法
【課題】マクロ検査ツールの適用性を広げ、高スループットで半導体ウェハからより詳細な検査情報を得る。
【解決手段】ウェハ検査方法は、ウェハ上に繰り返し配列されている個々の微細構造を解像するには不十分な結像解像度でウェハの全表面を結像させるステップを含む。本発明によれば、微細構造のフィーチャの特性は、微細構造を結像において直接解像することができないとしても、被選択検出信号群からの1若しくは複数の値の計算によって決定される。このようにして、記録される画像にマスク(109)が施され、画像の非マスク部分(111)は平均化によってさらに処理される。非マスク部分(111)は、ウェハのメモリ部分を含むように選択される。フィーチャ特性は、線幅、側壁の角度、微小寸法(CD)などを含むことができる。互いに異なる照明波長または偏光状態で撮影した複数の画像を組み合わせることもできる。
(もっと読む)
161 - 180 / 664
[ Back to top ]