
Fターム[2F065CC17]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 半導体製造関連 (1,910)
Fターム[2F065CC17]の下位に属するFターム
Fターム[2F065CC17]に分類される特許
101 - 120 / 554
欠陥検査装置、及び欠陥情報管理方法
【課題】被検査基板における欠陥発生状況の把握を妨げることなく、管理すべき欠陥データ量を抑制できる欠陥検査装置の提供。
【解決手段】欠陥検査装置は、撮像装置が生成した被検査基板面の被検査画像データを取得する手段と、被検査画像データと基準画像データとを比較して欠陥部を検出する手段と、検出された欠陥部の位置座標を少なくとも含む欠陥データを生成する手段と、区画基準領域データ及び前記位置座標に基づいてそれの各領域に存在する欠陥部の個数を算出する手段と、各領域の欠陥部の個数と各領域の許容値とを比較して欠陥部密集領域を検出する手段と、欠陥部密集領域における各欠陥部の欠陥データを、その領域に対して予め定められた領域位置データに置換する手段と、領域位置データと置換されなかった欠陥部の欠陥データとを管理サーバへ送信する手段とを備える。
(もっと読む)
半導体における周期構造の実時間分析

【課題】試料に形成された周期構造の特性を実時間で分析する。
【解決手段】波長の関数としての信号を発生させる分光計測モジュールがを使用する。出力信号はプロセッサーにより方形構造の理論的な初期モデルを構築する。次いで、プロセッサーは、この試料の広帯域放射に対する理論的な光学的応答を計算する。光学的応答の計算結果は、複数の波長において計測され正規化された値と比較される。この比較に基づいて、モデルの構成は実際の計測された構造により近づくよう修正される。プロセッサーは修正されたモデルの光学的応答を再計算し、計算結果を正規化されたデータと比較する。最適な方形が得られるまでこの処理が反復して繰り返される。その後、モデルを各々幅と高さを持つ層に分割しモデルの複雑さを反復して増大させる。構造が周期構造に類似するような最適なモデルが得られるまで、反復処理によりデータが最適化される。
(もっと読む)
干渉計システム、ステージ装置及び露光装置
【課題】検出結果の誤差を低減することが可能な干渉計システム、ステージ装置及び露光装置を提供すること。
【解決手段】移動体の位置情報を検出する干渉計システムであって、光を射出する光源と、光を分光して射出する分光装置と、移動体に設けられ、分光された光を反射させる移動鏡と、移動鏡を介した光を受光する受光装置と、光が分光装置から射出され移動鏡に入射し当該移動鏡で反射された後に分光装置へ向かう所定の光路を形成する第1光学系と、当該光路を進行した光が分光装置に入射せずに当該光路の進行方向とは逆向きに当該光路を進行するように光を導光する第2光学系と、第2光学系を進行する光のうち所定成分を前記受光装置に入射させ、所定成分以外の成分を光路に入射させないように当該光を分光する第2分光装置とを備える。
(もっと読む)
直交度の計測方法
【課題】2つのミラーの間の直交度を迅速かつ高い精度で計測する。
【解決手段】第1ミラー541および第2ミラー540を有する物品における前記第1ミラー541の反射面と前記第2ミラー540の反射面との直交度を計測する計測方法に係り、前記計測方法は、前記第2ミラー540の反射面に対して直角にレーザ光LB1が入射するように前記レーザ光LB1の光軸を調整する調整ステップと、前記第1ミラー541の反射面に平行な方向に前記物品を既知の距離だけ移動させたときの、前記レーザ光LB1が入射するように前記第2ミラー540の反射面に配置されたコーナーキューブCC1によって反射された前記レーザ光LB1の光軸の変位量を検出する検出ステップと、前記距離と前記変位量とに基づいて前記第1ミラー541の反射面と前記第2ミラー540の反射面との間の角度が直角からずれている量を計算する計算ステップとを含む。
(もっと読む)
三次元形状測定装置
【課題】 連続移動する測定対象物の三次元形状を、位相シフト法により高速に測定すると共に、垂直解像度や深度を柔軟に設定できる構成とする。
【解決手段】
被測定対象物に対して斜め上方から、投影方向に沿って光の強度が正弦波状に変化する格子縞を投影する格子縞投影器1と、鉛直上方に位置しエリアセンサ6を備えたカメラ2と、被測定対象物を一定方向へ移動させるステージ3とを備え、格子縞は位相が互いにπ/2ずつシフトした4つの帯状領域に分かれており、エリアセンサ6上の各帯状領域につき一本の水平ライン、計4本から画像を読出し、位相シフト法の原理を用いて位相を算出して高さに変換し、被測定対象物の三次元形状を測定する。
(もっと読む)
膜厚測定方法及び膜厚測定装置
【課題】構造が未知の膜体に対し、比較的短い計算時間で複数の膜厚を測定することができる方法及び装置を提供する。
【解決手段】本発明に係る膜厚測定方法では、測定対象の膜体に対し、予め作成された既知の単一膜厚値dj(j=1,2,...,m)に対する基準スペクトルSjと、前記膜体の所定の測定領域内におけるn個の照射領域から得られる測定スペクトルVk(k=1,2,...,n)とを、基準ベクトルsj及び測定ベクトルvkに変換し、ベクトル空間{v1,v2,...,vn}と各基準ベクトルsjとの距離Ljを算出する(ステップS1〜S4)。そして、距離Ljが極小となる膜厚値djをそれぞれ膜厚値として出力する(ステップS5及びS6)。この方法によれば、膜体の構造が未知であっても複数の膜厚を測定することができると共に、計算時間が比較的短いため、半導体製造等の用途においてリアルタイムで膜厚を測定することができる。
(もっと読む)
基板をコートする装置及び方法
本発明は,基板をコーティングする装置に関し,真空チャンバーと,内部がコートされる基板を受ける様に設計された真空チャンバーと,粒子の衝撃により装置の動作の間に除去されるように意図された少なくとも一つのスパッタリングターゲットを有し,少なくとも一つの窓が,前記真空チャンバーの壁に配置され,そして,前記スパッタリングターゲットの摩滅を判定する装置を有し,前記真空チャンバーの外側の少なくとも一つの予め規定されたポイントと,前記スパッタリングターゲットの表面の少なくとも一つの予め規定されたポイントとの間の距離を光学的に測定する側的装置を有し,前記測定装置が,更に視差オフセット及び/又は幾何学的歪みを修正できる評価装置を有する。さらに,本発明は,対応する方法に関する。 (もっと読む)
複屈折基板の板厚測定法及び板厚測定装置
【課題】複屈折基板の板厚を正確に求める板厚測定法を得る。
【解決手段】予め複屈折基板の板厚tと反射干渉光強度波長特性の振幅の節に対応した波
長λ(t)との関係を求めるステップと、前記基板の反射干渉光強度波数特性を取得する
ステップと、前記反射干渉光強度波数特性の節より波数の大きい領域の前記反射干渉光強
度波数特性のデータに対し、相隣接する2つのデータのうち波数の大きい側のデータから
波数の小さい側のデータを減じ、それに−1を乗じた値を求め、この値を波数の小さい側
のデータに加算した新データで、波数大きいデータを置換して補正反射干渉光強度波数特
性を求めるステップと、前記補正反射干渉光強度波数特性にFFT処理を施して、複屈折
基板の板厚を求めるステップと、を含む複屈折基板の板厚測定法である。
(もっと読む)
ステージ装置、露光装置、駆動方法及び露光方法並びにデバイス製造方法
駆動系により、アーム部材(71)から移動体(WFS)のXY平面に平行な一面に配置されたグレーティング(RG)に対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果と、レーザ干渉計を用いてアーム部材(71)の形状変化を計測する第2計測系の計測結果と、に基づいて移動体が駆動される。駆動系は、第1計測系の計測結果に含まれるアーム部材の形状変化に起因する計測誤差を、第2計測系の計測結果を用いて補正する。 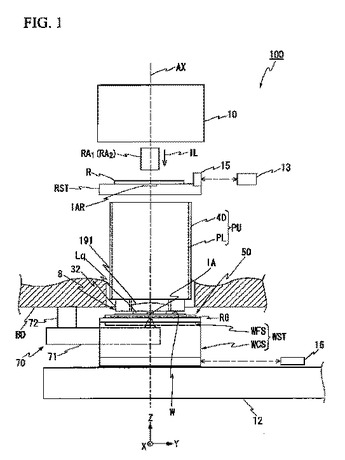 (もっと読む)
(もっと読む)
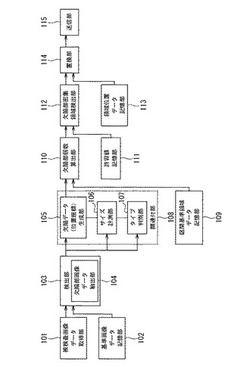
パターンマッチング装置およびそれを用いた半導体検査システム
【課題】CADデータに対応する画像データの位置情報を検出するパターンマッチング装置において、CADデータの形状とホールパターンの形状が大きく異なる場合でも、正確にパターンマッチングする。
【解決手段】ホールパターンの中心位置を画像化したデータ111を生成するCADホールパターン中心位置検出手段107と、画像データ105からパターンデータ112を抽出するパターン抽出手段108と、パターンデータ112からホールパターンの中心位置を検出し、画像データ105から検出したホールパターンの中心位置を画像化したデータ113を生成する手段109と、CADホールパターン中心位置データ111と画像ホールパターン中心位置データ113との照合処理により、CADデータ104に対応する画像データ105の位置データ114を検出する照合処理手段110と、信号出力インターフェース103と、で構成する。
(もっと読む)
可動物体の位置依存信号を測定するための測定システム、リソグラフィ装置および方法
【課題】測定精度が可動物体の動作によって実質的にほとんど影響されない、可動物体の位置依存信号を測定するように構成された好ましくはエンコーダ型高精度測定システムを提供する。
【解決手段】エンコーダ型測定システムは可動物体の位置依存信号を測定するように構成され、可動物体の上に取付け可能な少なくとも1つのセンサと、実質的に静止したフレームの上に取付け可能なセンサターゲットと、実質的に静止したフレームの上にセンサターゲットを取付けるように構成された取付けデバイスとを含む。実質的に静止したフレームに対するセンサターゲット物体の移動および/または変形を補償するように構成された補償デバイスをさらに含む。補償デバイスは受動型または能動型制振デバイスおよび/またはフィードバック位置制御システムを含むことができる。代替の実施形態において、補償デバイスは、センサターゲット物体の位置を固定する把持デバイスを含む。
(もっと読む)
基板上のオブジェクトの概略構造を決定する方法、検査装置及び基板
あるシステム及び方法が、再構築により、基板上のオブジェクトの概略構造を決定する。これは、例えば、リソグラフィ装置のクリティカルディメンション(CD)又はオーバレイ性能を評価するための微細構造のモデルベースのメトロロジーなどに適用できる。基板上のスタック上の格子などのオブジェクトの概略構造を決定するためにスキャトロメータが使用される。ウェーハ基板は上層と下地層とを有する。基板はスタックオブジェクト上の格子を含む第1のスキャトロメトリターゲット領域を有する。スタック上の格子は上層と下地層とからなる。上層は周期格子のパターンを備える。基板はさらに、上層がない、隣接する第2のスキャトロメトリターゲット領域を有する。第2の領域は、パターン形成されていない下地層のみを有する。 (もっと読む)
塗布状態検査方法
【課題】粘性材料が濡れ広がり易い材質からなる場合や、光の反射が不順になり易い材質からなる場合であっても、塗布対象上への塗布状態の正確な検査結果を得ることができる塗布状態検査方法を提供することを目的とする。
【解決手段】基板Pb上に所定の描画パターンで塗布されたペーストPstを撮像してその画像を取り込んだ後(ステップST1)、その取り込んだ画像に基づいて、基板Pb上に塗布されたペーストPstの輪郭Gを抽出し(ステップST2)、その抽出したペーストPstの輪郭GからペーストPstの輪郭長を求める(ステップST3)。そして、求めたペーストPstの輪郭長をそのペーストPstの描画パターンに対応して定められた輪郭長の基準範囲と比較し、ペーストPstの輪郭長が基準範囲内にあるかどうかの判定を行って(ステップST4〜ST6)、ペーストPstの塗布状態の良否判断を行う(ステップST7及びST8)。
(もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】リソグラフィ装置の処理能力を大きく損なうことなく、重ね合わせ精度を向上させる方法及び装置を提供する。
【解決手段】露光条件を最適化するために基板の露光時に基板上の位置合わせ標識を検査する。基板10が露光及び位置合わせユニット15の真下で走査を受けるとき、基板のそれぞれの部分が最初に検出器ユニット16の下方を通過し、次いで露光ユニット17の下方を通過する。したがって、基板10のそれぞれの部分に関して検査器ユニット16によって測定された、直線位置、配向、及び膨張に関する情報が露光ユニット17に伝達可能であり、基板が露光ユニット17の真下を通過しながら基板が露光されるとき、基板の当該部分に関する露光条件を最適化することができる。
(もっと読む)
セラミックシートの検査方法およびセラミックシートの製造方法
【課題】本発明は、セラミックシートの自動的な検査にも適用できるものであり、大量のセラミックシートから反りなどの欠陥を効率良く且つ正確に検出するための方法を提供することを目的とする。
【解決手段】本発明に係るセラミックシート(但し、固体酸化物形燃料電池の固体電解質膜用セラミックシートを除く)の検査方法は、当該セラミックシートの反りを三角測距式変位センサーで検出する工程;および、次に、セラミックシートの表面および内部に存在する欠陥を透過型光電センサーで検出する工程を含むことを特徴とする。
(もっと読む)
マルチロー低分解能イメージセンサを使用する高分解能リニアイメージセンシング
【課題】エッジ検出オペレーションのために適切なセンサ構成を提供する。
【解決手段】本発明の一態様の感光チップは、Y方向に実質的に整列された少なくとも一組のフォトセンサと、複数の開口部を備える非透過的材料の層であって、前記複数の開口部における各開口部は、それぞれ中心線を有し、各フォトセンサの一部のみと重なり、前記各フォトセンサの前記一部のみが感光性を有する、非透過的材料の層と、を備え、フォトセンサの各組に対する開口部のそれぞれの前記中心線は、前記Y方向の同一直線上になく、前記複数の開口部は、前記Y方向に直交するX方向に実質的に整列されている開口部の行を少なくとも1つ含み、前記開口部のそれぞれは、前記Y方向に直交するX方向で等しい幅を有する。
(もっと読む)
露光装置、該露光装置の校正方法及び校正用部材
【課題】簡易な構造であっても、レーザ変位計の温度変化による測定値の変動を精度良く校正することが可能な露光装置、該露光装置の校正方法及び校正用部材を提供する。
【解決手段】マスクパターンを形成してあるマスク4を保持するマスク保持部と、露光対象となる基板を保持する基板保持部とを有し、光源9から照射された光により、マスクパターンを基板表面に露光する。マスク4の下面と基板の上面との間の距離を測定する一又は複数のレーザ変位計を備えており、レーザ変位計の温度校正の基準となる基準板を含む校正用部材20を備えた校正器具30を、光源9の照射領域とは離隔して設置する。
(もっと読む)
高速三次元計測装置及び高速三次元計測方法
【課題】被測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる高速三次元計測装置を提供する。
【解決手段】高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、を備える。
(もっと読む)
高速高解像度三次元太陽電池検査システム
光学検査システム及び方法が提供される。加工対象物輸送機構が加工対象物(12)をノンストップで移動させる。照明装置(40)が、ライトパイプを含み、第一及び第二のストロボ照明野タイプを提供するように構成されている。第一(3)及び第二(5)のカメラ(2)アレイが、加工対象物(12)の立体画像化を提供するために配設されている。第一のカメラアレイ(3)は、第一の照明野を用いて加工対象物(12)の第一の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第二の複数の画像を生成するように構成されている。第二のカメラアレイ(5)は、第一の照明野を用いて加工対象物(12)の第三の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第四の複数の画像を生成するように構成されている。処理装置が、第一、第二、第三及び第四の複数の画像の少なくともいくつかを記憶し、他の装置に提供する。 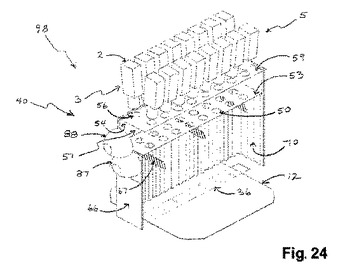 (もっと読む)
(もっと読む)
101 - 120 / 554
[ Back to top ]