
Fターム[2F065HH04]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | スポット光、ビーム光 (1,478)
Fターム[2F065HH04]に分類される特許
41 - 60 / 1,478
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
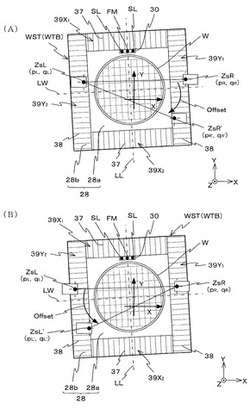
【課題】複数のZヘッドを切り換えながら、移動体の高さと傾斜を継続的に計測することにより、移動体を高精度で駆動する。
【解決手段】制御装置は、テーブルWTBの±X端部に設置された反射面39Y1,39Y2上に位置する2つのZヘッドZsR,ZsLを用いて、テーブルWTBの高さと傾斜を計測する。テーブルWTBのXY位置に従って、使用するZヘッドをZsR,ZsLからZsR’,ZsL(あるいはZsR,ZsL’)に切り換える。制御装置は、切り換えの際、座標つなぎ法を適用して、新たに使用するZヘッドZsR’(あるいはZsL’)の初期値を設定する。これにより、テーブルのXY位置に応じて使用するZヘッドが逐次切り換えられるにもかかわらず、切り換えの前後でテーブルの高さと傾斜の計測結果が保存され、テーブルを高精度で駆動することが可能になる。
(もっと読む)
光学式変位測定装置

【課題】光源から放射された入射光の微小な変位を測定するにあたり、出力信号のS/Nを向上させるとともに、回路構成を小型化することができる光学式変位測定装置を得る。
【解決手段】受光面が光に対して不感なギャップを介して複数の領域に分割された4分割フォトダイオード10に対して、光源から放射された入射光を入射させ、4分割フォトダイオード10のフォトダイオード11A〜11Dからの出力を増幅し、増幅された出力の変化に基づいて、4分割フォトダイオード10に対する入射光の相対的な変位を測定する光学式変位測定装置であって、4分割フォトダイオード10のフォトダイオード11A〜11Dには、それぞれ入射光によって出力を生じない不感領域12と、入射光によって出力を生じる感光領域13とが形成され、4分割フォトダイオード10全体について、不感領域12は、感光領域13に囲まれているものである。
(もっと読む)
測定装置
【課題】加工面と加工工具のように、対象物体面に目的物体の先端を精度良く位置決めする位置検出装置を提供する。
【解決手段】対象物体面上の所望の位置に光源光束を合焦させて、その合焦点に目的物体先端を近づけたときに生じる反射光の強度変化と反射光束の光線方向分布の変化を検出し、目的物体を対象物体面に関して高い分解能で接近させ位置決めする。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
厚さ測定装置
【課題】貼合わせウェハ全体について厚さを測定できる装置の提供。
【解決手段】貼合わせウェハ1の厚さ測定光学系及び観察光学系と、測定光学系から出力される信号を用いて貼合わせウェハ1の厚さを算出する信号処理装置とを具え、測定光学系は、第1の波長域の測定用光源30と、この測定光を投射して光スポットを形成する対物レンズ17と、その反射光の光検出手段40とを有し、観察光学系は、前記第1の波長域とは異なる第2の波長域の観察用照明光を放出する照明光源41と、照明光を投射する対物レンズ17と、その反射光を受光して2次元画像を撮像する撮像装置48とを有する。これらで共通の対物レンズ17と測定光源及び観察光源との間の光路中には、前記測定光学系と観察光学系とを光学的に結合する波長選択性を有するカップリング素子34を配置する。撮像装置48は、前記測定光により形成された光スポットの像が重畳された像を撮像する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
回転駆動機構
【課題】複雑な加工を必要とすることなく、有線の装置を360度またはこれを少し超える程度の角度で回転させることができるようにした、回転駆動機構を提供する。
【解決手段】有線装置を搭載して、基板20に対し正逆方向に回転可能に設けられた回転テーブル21と、回転テーブル21に設けられた第1ドグ28と、基板20に設けられて第1ドグ28に押圧されることで変位する第2ドグ29と、第2ドグ29の変位によって押圧されることで回転テーブル21の回転を停止させる一対の規制部とを備えた回転駆動機構である。一対の規制部は回転テーブル21が初期位置から360度以上の設定角度正回転した際に、第2ドグ29に押圧されるように基板20上に配置された第1規制部35aと、回転テーブル21が初期位置から360度以上の設定角度逆回転した際に、第2ドグ29に押圧されるように基板20上に配置された第2規制部35bとを有している。
(もっと読む)
画像形成装置、パターン位置決定方法、画像形成システム
【課題】シート材の影響を抑制してテストパターンの位置を検出する画像形成装置を提供すること。
【解決手段】液滴の吐出タイミングを調整する装置100であって、テストパターンからの反射光を読み出す読み取り手段30と、均一パターンの印刷データを記憶する印刷データ記憶手段54と、均一パターンを記録媒体に印刷した後、テストパターンを均一パターン上に印刷するパターン形成手段52と、読み取り手段を等速で移動させる相対移動手段313と、テストパターンが形成された記録媒体に対し読み取り手段が相対移動しながら、テストパターンを光が横断する際に前記受光手段が受光した反射光の第1の検出データを取得する第1の検出データ取得手段617と、予め定められた上限値と下限値の間に含まれる第1の検出データにライン位置決定演算を施してテストパターンの位置を検出する位置検出手段616、を有する。
(もっと読む)
ステレオカメラの取り付け調整方法及びステレオカメラ
【課題】ステレオカメラを自動車等に取り付ける際に、該ステレオカメラの校正距離方向と目的距離方向の調整を容易に行えるようにする。
【解決手段】ステレオカメラ10を自動車40に取り付けて、自動車の直進方向の距離を測定するものとする。ステレオカメラ10は複数の単眼カメラを筐体内に備え、筐体前面を筐体基準面とし、該筐体基準面は反射面を有している。車外に設置されたレーザ光源50の出射光軸と自動車40の直進方向が平行になるように調整した後、レーザ光源50からの出射光をステレオカメラ10の筐体基準面で反射させて、反射光が出射光位置に戻るように、ステレオカメラ10の取り付け姿勢を調整する。
(もっと読む)
動きを検出するシステム、リソグラフィ装置、およびデバイス製造方法
【課題】誤差の影響を受けにくいが大きな空間を占有しない、改善された精密測定システムを提供する。
【解決手段】本体の動きを検出するシステムであって、本体と、基準フレームに対して実質的に静止して取り付けられた第1回折格子40,42と、本体に取り付けられた第2回折格子50,52と、第1および第2回折格子で回折された一つ以上の放射ビームを受け取り、基準フレームに対する本体の動きを検出するように構成された検出器60,61,62,63と、を備え、検出器60,61,62,63が本体に結合され、本体に対して移動可能である。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
計測装置および情報処理装置
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲から、前記パターン光の識別分解能を設定する設定手段と、前記識別分解能に応じて、前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
金属試料を測定する膨張計
【課題】温度に依存する長さの変化を正確に測定することができる膨張計を提供する。
【解決手段】試料3を固定することのできる試料ホルダ4、14と、試料3を加熱するために試料3に配置される少なくとも1つの誘導コイル5と、試料3の温度を測定する少なくとも1つのセンサとを備える、金属試料3を測定する膨張計1であって、試料3の長さの変化を検出する光学測定装置6、9が備えられている。これにより、温度に依存する、試料の長さの変化を正確に測定することができる。
(もっと読む)
接合継ぎ目を監視する光学測定装置、ならびに同測定装置を備える接合ヘッド及びレーザ溶接ヘッド
【課題】ワークピース内の接合領域を監視する光学測定装置を提供する。
【解決手段】光学測定装置100は、接合対象であるワークピース16の方向に光扇22を投射して、前記接合対象であるワークピースの接合領域10内に、その接合領域内の接合継ぎ目14と交差する三角測量光ライン24を生成するのに適した第1光源20を備える少なくとも一つの光切断装置18と、前記接合対象であるワークピースの接合領域を均一に照光する第2光源28を備える照光装置26と、接合継ぎ目上に投影された三角測量光ラインの空間分解画像を生成する、第1測定ビーム経路32を有する第1光センサ30と、接合継ぎ目の空間分解画像を生成する、第2測定ビーム経路36を有する第2光センサ34とを含み、第2測定ビーム経路は、第1測定ビーム経路内に同軸結合され、第1光センサの読み取り速度は1kHzを上回り、第2光センサの読み取り速度は500Hz未満である。
(もっと読む)
ヘテロダインレーザー干渉測長器
【課題】測長結果から精度よくデッドパスの影響を排除するヘテロダインレーザー干渉測長器を提供する。
【解決手段】ヘテロダインレーザー光源10からのビームを分岐させて測定ビームB1と参照ビームB2を生成する分岐器80と、測定ビームB1及び参照ビームB2を分割する偏光ビームスプリッタ30と、測定光路LP1,LP2に設けられる1/4波長板31,32と、可動測定物50に固定され、測定ビームB11,B12が照射される測定ミラー341,342と、測定ミラー341,342近傍に配置され、参照ビームB21,B22が照射される反射ミラー411,412と、測定ミラー341,342の反射光を干渉させた光と反射ミラー411,412の反射光を干渉させた光に基づく2つのビート信号から変位を算出する演算回路70を備え、分機器80は測定ビームB1と参照ビームB2の光量比を連続的に変化させて調整する調整手段を有する。
(もっと読む)
検査装置、リソグラフィ装置、リソグラフィプロセシングセルおよび検査方法
【課題】回折次数の重なりを防止しつつ基板の特性を精度良く求める技術を提供する。
【解決手段】角度分解分光法に対しては、4つのクアドラントを有する照明プロファイルを有する放射ビームが使用される。第1および第3クアドラントが照明される一方、第2および第4クアドラントは照明されない。したがって、結果として生じる瞳面は4つのクアドラントに分けられ、ゼロ次回折パターンのみが第1および第3クアドラントに現れて一次回折パターンのみが第2および第3クアドラントに現れる。
(もっと読む)
欠陥計測方法
【課題】光学素子の欠陥を簡便に発見、測定することのできる欠陥計測方法を提供する。
【解決手段】第一の観点に係る欠陥計測方法は、測定対象に光源から光を照射し、収束光にして測定対象に入射し、測定対象又は光源を、収束光の焦点が測定対象の一方の面から他方の面に至るまで移動させ、測定対象の一方の面と測定対象中に存在した欠陥との間の距離を計測し、距離に測定対象の屈折率を乗じた値を求め、一方の面からの前記欠陥の深さを計算する。
(もっと読む)
画像センサのチルトを求めるための方法
【課題】カメラに取り付けられた画像センサのチルトを求めるための、改善された方法を提供する。
【解決手段】カメラ12における画像センサ10表面の、カメラ12のレンズ基準面26に対するチルトを求めるための方法であり、画像センサ10に光を送るステップと、画像センサ10から反射した光を受けるステップと、反射光における干渉パターンを特定するステップと、干渉パターンの特徴を特定するステップと、干渉パターンにおいて特定された特徴の位置に基づいて画像センサ10表面のチルトを求めるステップとを含む。
(もっと読む)
3次元形状の取得装置、処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28、32と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28、32で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。さらに、カメラ28と32の整合性を調べることで3次元形状の精度向上が実現される。
(もっと読む)
41 - 60 / 1,478
[ Back to top ]