
Fターム[2F065PP15]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708) | ベルトコンベア (322)
Fターム[2F065PP15]に分類される特許
61 - 80 / 322
対象物の複数の側面を画像化するための装置および方法
【課題】微小なコンデンサなどの対象物は、検査プロセス中に損傷することがあり、殊に小さくて長い電気的対象物などの対象物を検査するための装置および方法を提供する。
【解決手段】対象物の複数の画像を獲得するための装置は、横方向画像化領域に対象物を横方向で移送するようになされた複数の横移送機部分を含む横移送機であって、各横移送機部分は、対象物レシーバおよび移送要素を含み、移送要素は、所定の抵抗を超えた抵抗を受けない限り、対象物レシーバを画像化領域に向けて移動させる、横移送機と、対象物が横方向画像化領域に配置されたとき、対象物の2つの逆向きの側面の画像を得るように構成された撮像装置とを含む。
(もっと読む)
方向検出装置

【課題】移動体の進行方向を、簡易な構成で検出する方向検出装置を提供する。
【解決手段】投光部2を間に挟んで受光部3,4を配置して、受光部3,4が移動体10の有無を示すON/OFF出力を行う。方向判定部6が、受光部3,4のON/OFF出力の経時変化に基づいて、移動体10の進行方向が受光部3から受光部4の方向か、又は受光部4から受光部3の方向かを1次元で検出する。
(もっと読む)
組付受部品の認識構造及びこれを用いた組立情報認識装置並びに組立処理装置
【課題】組付受部品の位置及び姿勢からなる配置情報を容易且つ正確に認識する。
【解決手段】予め決められた部位に組付部品3を組み付けるための組付受部品2が配置された組立基台1の一部に設けられ、この組立基台1の位置及び姿勢からなる配置情報を認識する基準となる認識基準面11と、この認識基準面11に対し撮像具5にて撮像可能に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、を備える。組付受部品2に認識基準面11と認識表示体12とを備えてもよい。更に、組立情報認識装置や、組立処理装置をも対象とする。
(もっと読む)
半導体ウェハの表面検査システム及び表面検査方法
【課題】半導体ウェハ表面に存在するソーマークなどの線状の凹凸について、短時間かつ容易に検査が可能であり、検査に対する振動の影響を低減できる技術を提供する。
【解決手段】半導体ウェハWの表面の全域に光源装置2によって斜め方向から光を照射し、CCDカメラ4で半導体ウェハW全体を撮影する。これにより、半導体ウェハWの各ポイントからの前記照射光の反射光または散乱光の強度を検出する。取得された光の2次元的な強度分布に基づいて、半導体ウェハWの表面に生成されたソーマークなどの凹凸を検出し、またはその大きさを測定する。
(もっと読む)
画像処理方法および画像処理装置
【課題】上述のような液体レンズを用いて、ワークに対する画像処理を適切に行うことが可能な画像処理方法および画像処理装置を提供する。
【解決手段】液体レンズへの駆動電圧の印加後、撮像部に画像データを順次生成させるとともに、これらの画像データを記憶する。そして、記憶した画像データに対して合焦判定を行って、その合焦判定の結果に基づいて、後段の画像処理に適切な(1または複数の)画像データおよび/または(1または複数の)部分画像を選択する。さらに、選択された画像データまたは部分画像を用いて、画像計測処理や画像合成処理を実行する。
(もっと読む)
検査装置および検査方法
【課題】光学的な測定を行うための照射部および受光部がそれぞれ最小個数でありながらも、被検査基板の測定対象物の光学的な測定を精度良く行うことが可能な検査装置および検査方法を提供する。
【解決手段】レーザー計測器33はレーザー光を照射する照射部33aと測定対象物111で反射された反射光を受光する受光部33bを有し、シャフト333の下端に取り付けられている。シャフト333にはベルト335を介してモータ331の回転駆動力が伝達されるように構成されており、レーザー計測器33はモータ331の回転により向きを変更可能に構成されている。これによって、測定対象物111から見たレーザー光の入射経路L1と反射光の反射経路L2との入受光関係が調整可能になっている。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】PTPシートの製造過程における錠剤の欠け等の検査に際し、検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置は、錠剤に光を照射する照明装置と、その反射光を撮像するカメラと、カメラから出力される画像信号を処理する画像処理装置とを備えている。画像処理装置は、所定の三次元計測法により錠剤の三次元データを取得し、それに基づき、錠剤の複数の断面部の輪郭を抽出し、各断面部の輪郭上の所定点における接線が当該断面部の輪郭上に他の接点を有するか否かを判定し、所定点における接線が他に接点を有する場合に、当該接線と輪郭により囲まれた領域を欠け領域として認識し、当該欠け領域の連結成分である欠け空間の大きさを認識し、欠け空間の大きさが許容範囲内か否かを判定することで良否判定を行う。
(もっと読む)
キャリブレーション装置及びキャリブレーション方法及び位置検出用治具及び部品検査装置
【課題】より簡易な構成でありながら、部品を把持する把持部とその位置を補償するためのカメラとの相対位置を補償、校正することのできるキャリブレーション装置及びキャリブレーション方法、及びこうしたキャリブレーションに用いられる位置検出用治具、及び部品検査装置を提供する。
【解決手段】キャリブレーション装置は、部品検査装置に設けられ、ICチップを搬送するロボットハンドユニットが備えるICチップを撮像するカメラの視野中心と、認識されたICチップを吸着するノズルの軸中心との間の相対位置関係を検出する。部品検査装置には、この相対位置関係を検出するためにノズルの平行移動範囲内に設けられたフォトセンサー41と、該フォトセンサー41と所定の位置関係でかつカメラの撮像範囲内に設けられた認識マーク45とが設けられている。
(もっと読む)
外観検査装置
【課題】太陽電ウエハの3次元形状を正確かつ高速に算出する。
【解決手段】第1及び第2形状算出部24,34は、撮像部20により所定のフレームレートで連続的に撮像された複数枚の光切断線画像の画像データを基に、ウエハ50の表面の3次元形状データを算出する。ここで、第1形状算出部24は、カメラ21〜23が現フレームの光切断線画像を撮像する期間に、1つ前のフレームに探索処理を行うと同時に、2つ前のフレームの光切断線画像に重心算出処理を行う。
(もっと読む)
欠陥検査方法及びその装置
【課題】
エッチング完了後の溝底ショート欠陥やスクラッチを検出するための高仰角照明による暗視野欠陥検出方法において、レンズ反射光などの迷光が像面に到達することによる検査感度を阻害することを防止する。
【解決手段】
欠陥検査装置を、本来同一の形状となるべきパターンが繰り返して形成された試料上の異なる領域に異なる光学条件で同時に照明光を照射する照射手段と、照明光を照射した領域からの反射光を異なる領域ごとに検出する検出手段と、検出した反射光の検出信号を処理して異なる領域ごとに異なる光学条件の元での欠陥候補を抽出する欠陥候補抽出手段と、異なる光学条件の元で抽出した欠陥候補を統合して欠陥を抽出する欠陥抽出手段と、抽出した欠陥の特徴量を求めて該求めた特徴量に基づいて前記欠陥を分類する欠陥分類手段とを備えて構成した。
(もっと読む)
外部検査装置
【課題】個体ロール紙の下部について外部異常の検出を可能とする。
【解決手段】長尺ロール紙Rを一定の長さに切り分けてなる個体ロール紙Tを搬送する搬送手段12と、搬送手段により搬送される個体ロール紙の外部の異常を検出する検出手段15を備え、搬送手段は、その中心線が搬送方向に平行な状態に向けられた個体ロール紙を水平方向における両側から挟んで搬送する一対のコンベア機構12a,12bを有し、検出手段は、一対のコンベア機構により搬送される個体ロール紙を下方から外部の異常の検出を行う。
(もっと読む)
果実形状測定装置
【課題】 果実は、平核無柿のように平面視で正方形に近い形態のものが上級品とされ、円形に近いものは異形品とされる。そこで、この果実の四角度合を測定する果実形状測定装置、乃至、柿等の果実選別の選別センサとするものである。
【解決手段】 果実の撮像画1と、この撮像位置に果実の基準型として重合設定する基準画2との各中心位置3を致心させた状態で、この基準画2を中心位置3の周りに移動させながら、この基準画2の外周に食み出す食出撮像画部分4の面積を各移動撮影位置毎に算出して、この各食出撮像画部分4の面積のうち最小面積値に基づいて、この果実の変形度合とする。
(もっと読む)
検査装置および検査方法
【課題】画像認識に適した検査用の画像に用いる撮像画像を決定するための作業を簡素化するとともに決定基準を標準化することが可能な検査装置および検査方法を提供する。
【解決手段】この外観検査装置100(検査装置)は、複数の照射角度で照明光を照射可能な照明部41と、検査対象部位Pおよび非検査対象部位Qを複数の照射角度の照明光を用いてそれぞれ撮像する撮像部42と、複数の照射角度の照明光を用いてそれぞれ撮像された複数の撮像画像中の検査対象部位Pにおける光の強度と、複数の撮像画像中の非検査対象部位Qにおける光の強度とに基づいて、検査用画像に用いる撮像画像を決定する演算処理部51とを備える。
(もっと読む)
画像情報検出装置
【課題】 構成素子の配置誤差や画像情報検出装置自体の配置誤差に対して、パターンの検出位置精度が鈍感となる画像情報検出装置を提供すること。
【解決手段】 複数の感光ドラムを有するカラー画像形成装置の画像の重なりずれを検出する画像情報検出装置は、四角形の発光面を有する光源と、所定の方向に移動する像担持体と、四角形の受光面を有する受光手段と、前記光源の発光面と前記像担持体を共役関係にし、前記光源から出射された光束を前記像担持体上に形成された重なりずれ検出パターンに照射する照明光学系と、前記像担持体と前記受光手段の受光面を共役関係にし、前記重なりずれ検出パターンにて反射された光束を前記受光手段に導光する受光光学系と、を有し、前記発光面の前記像担持体上における共役像の輪郭を形成する発光面共役像直線部と前記受光面の前記像担持体上における共役像の輪郭を形成する受光面共役像直線部は平行である。
(もっと読む)
部品検査装置及びプログラム
【課題】複数の部品が任意に配置されている場合であっても、部品の配置による見え方の相違を吸収して大きさや形状等の外観を検査する。
【解決手段】複数の部品を撮影した画像をブロブ処理し、抽出されたエッジから求まるエッジ接線ベクトルを用いてエッジ接線画像に変換し、サンプルエッジ接線画像に対するマスターエッジ接線画像の畳み込み処理により抽出された個々のブロブに基づいて、マスター部品の所定部位のサイズ、位置xm、及び角度θmを定めたテーブルを用いて、検出されたサンプル部品の位置xs及び角度θsに対応するサイズを補完計算して、検出されたサンプル部品の所定部位のサイズと比較して、サンプル部品を検査する。
(もっと読む)
検査装置
【課題】検査対象部の異常の判別の精度を向上させることができる検査装置を提供する。
【解決手段】検査装置1は、ケース2の隅Cに形成される隙間Dを含む所定の撮像範囲を撮像するカメラ10と、ケース2を照明する照明器11と、カメラ10が取得した前記所定の撮像範囲の画像に基づいて隙間Dが映されている部分を含むように設定された検査領域T内の隙間Dの面積を取得し、取得した隙間Dの面積に基づいて隙間Dの異常の有無を判別する判別装置13と、を備え、判別装置13は、隙間Dが2つに区分されるように検査領域Tを二つの小領域T1、T2に分けて二つの小領域T1、T2毎に異常の有無を判別する。
(もっと読む)
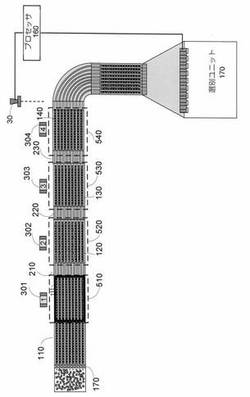
検査装置および検査方法
【課題】レーザ計測装置を用いて複雑な形状を有する検査物の検査を行う際にも、短時間に高精度な測定を行うことが可能な検査装置を提供する。
【解決手段】この外観検査装置100(検査装置)は、実装済み基板110を撮像する撮像部31と、実装済み基板110上の計測位置にレーザ光を照射して実装済み基板110からの反射光を受光することにより、実装済み基板110の形状を計測する第1レーザ計測部33および第2レーザ計測部34と、撮像部31による実装済み基板110の撮像画像に基づいて、撮像画像中に含まれるレーザ計測に不適な領域(レーザ計測除外領域)を判定し、レーザ計測除外領域を第1レーザ計測部33または第2レーザ計測部34による計測対象から除外する演算処理部41とを備える。
(もっと読む)
高温ガラス容器の品質を向上させ、成形プロセスを制御するために、高温ガラス容器をモニタリングするシステムおよび方法
【課題】高温ガラス容器の品質をモニタリングし、向上させ、制御することを可能にするために、高温ガラス容器がそれらを製造するI.S.機から流れるときに、ホットエンドにおいて高温ガラス容器をモニタリングするシステムおよび方法を提供すること。
【解決手段】そのシステムは、高温ガラス容器からの放射をモニタリングし、各高温ガラス容器の画像を抽出し、高温ガラス容器の画像を分析し、その高温ガラス容器の画像を容器の品質を示す情報と一緒に操作者が視認できる表示画面に提示して、ガラス成形プロセスの偏差をすぐに識別可能にし、ガラス容器の品質を連続して改善する。そのシステムおよび方法は、以前に知られた、高温ガラス容器をモニタリングする試みを妨げる条件およびパラメータと関係がなく、ガラス容器の生産の品質を高くし、かつ均質性を実質的に向上させることを可能にする。
(もっと読む)
ウェハ搬送検査機台及びウェハ搬送検査方法
【課題】ウェハ検査の精度を向上させること。
【解決手段】ウェハを載置して当該ウェハを搬送する第1搬送ユニットと、前記第1搬送ユニットに隣接し、前記第1搬送ユニットにより搬送されたウェハを受け取り、当該ウェハを載置して当該ウェハを搬送する第2搬送ユニットと、前記第2搬送ユニットの上のウェハを検査する検査ユニットと、前記検査ユニットに連結されて、前記検査ユニットを前記第2搬送ユニットの上で移動させる駆動装置と、を備え、前記第2搬送ユニットがウェハの搬送を一時的に停止したとき、前記駆動装置が前記検査ユニットを移動させつつ前記検査ユニットが前記第2搬送ユニットの上のウェハを検査する。
(もっと読む)
物品撮影方法および物品撮影装置
【課題】多列、かつ、ランダムな状態で搬送される多数の容器を、カメラで撮影しカウントすることにより、容器の数を正確に把握する。
【解決手段】撮影コンベヤ上に2台のカメラを設置し、搬送されている容器を撮影する。撮影された画像は制御装置16の画像処理部18に送られて二値化処理されキャップの中心座標を算出されて記憶部20に記憶される。容器がキャップの径の大きさだけ移動する前に、制御装置16の指令部22からの指示により次の画像を撮影する。この画像のキャップも中央座標を算出され、記憶部に記憶されている前回の座標データと比較され、移動位置認識部28で容器の移動位置が認識される。キャップのサイズ分だけ移動する前に次の撮影を行うので、同じ容器の新旧の情報を確実にリンクさせることができ、撮影した画像から容器の数を正確にカウントすることができる。
(もっと読む)
61 - 80 / 322
[ Back to top ]