
Fターム[2F065PP15]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708) | ベルトコンベア (322)
Fターム[2F065PP15]に分類される特許
81 - 100 / 322
画像処理装置および画像処理プログラム

【課題】被測定物の露出面の撮像部に対する位置関係に影響されることなく、正確に被測定物の位置などを計測できる画像処理装置およびそれに向けられた画像処理プログラムを提供する。
【解決手段】ワーク2の露出面50が基準面P1とは平行ではない状態で生成される画像データ200上における露出面50の頂点61,62,63の座標位置が指定される。また、ワーク2の実際の大きさに対応する、露出面の頂点61,62,63の基準面P1における座標位置が指定される。すなわち、基準面P1に設定した2次元座標系において、ワーク2の露出面50を基準面P1に重ねたときの各頂点61,62,63の座標位置が実寸法で指定される。ワーク2の露出面50に含まれる複数の特徴点について、基準面P1における座標値および画像データ200上における座標値をそれぞれ対応付けることで、モデル画像を生成するための変換式が決定される。
(もっと読む)
寸法重量測定装置及び寸法重量測定方法

【課題】搬送中の貨物の寸法及び重量を高精度に測定できる寸法重量測定装置を提供する。
【解決手段】搬送路上を移動する貨物Aの寸法と重量とを測定する装置であり、搬送方向と直交する方向に複数の受光センサを配列し、貨物Aに投影した平行光束を受光センサで受光して、貨物Aに遮光されて受光できない遮光受光センサの位置を検出する光学ゲート50と、貨物Aの搬送距離を検出する搬送距離検出手段12と、搬送距離が所定量増加するごとに、光学ゲート50の遮光受光センサの位置を記憶し、この動作を貨物Aが光学ゲート50を通過するまで繰り返すメモリと、貨物Aが光学ゲート50を通過した後、メモリに記憶されたデータに基づいて貨物Aの寸法を算出する寸法測定手段と、搬送路上を移動する前記貨物の重量を測定する重量測定手段とを備える。この装置は、貨物Aの搬送速度の影響を受けずに、貨物Aの寸法及び重量を高精度に測定できる。
(もっと読む)
姿勢認識方法およびこの方法を用いた3次元視覚センサ
【課題】円形状の面の姿勢を認識するのに必要な3次元座標を得るための処理を高速化し、かつ3次元座標の計測誤差が小さくなるようにする。
【解決手段】円形物を対象にしたステレオ撮像により生成された各画像を処理して、円の輪郭線を表すエッジ画像を生成し、基準画像から生成されたエッジ画像から複数のモデル円弧P1,P4,P5,P8を抽出して、各モデル円弧毎に1点ずつ計測対象点R1,R4,R5,R8に設定する。つぎに、比較画像から生成されたエッジ画像を、基準画像を生成したカメラと同一の光軸方向から撮像を行った場合の画像に変換し、変換処理後のエッジ画像から各モデル円弧P1,P4,P5,P8に対応する円弧を抽出し、各計測対象点R1,R4,R5,R8への対応点を特定する。そして、画像間で対応づけされた計測対象点の3次元座標を算出し、各3次元座標が分布する平面の方程式を特定する。
(もっと読む)
位置判別装置及びそれが装備された移動体
【課題】被検出物の位置を的確に判別することができる位置判別装置を提供する。
【解決手段】一対の撮像手段11を、それらの光軸が互いに交差し、且つ、光軸の交点oに対して上下方向の下方側に位置し、且つ、光軸の交点oに対して車体前後方向の両側に位置する状態で分散配置して、判別手段を、光軸の交点oの上下方向の下方側及び上方側における光軸の交点oから設定距離未満である範囲を非検出範囲とし、光軸の交点oの上下方向の下方側における光軸の交点oから設定距離以上離れた範囲を検出範囲として、一対の撮像手段11にて撮像された一対の画像における被検出物6の撮像位置の差に基づいて検出範囲における基準位置に対する被検出物6の上下方向での位置を判別するように構成する。
(もっと読む)
樹脂厚測定装置
【課題】表面がフラットでない樹脂層の厚みを正確に測定する。
【解決手段】光透過性着色樹脂層(樹脂層)3が表面に形成された線材2を含む撮像領域Dを撮像して画像データD1を出力するカメラ5と、樹脂層3の厚みと彩度との対応を示す彩度相関データ、および樹脂層3の厚みと色相情報との対応を示す色相相関データが記憶された記憶部6と、画像データD1を画像処理して撮像領域D内の各位置における彩度および色相を抽出する色情報抽出処理、彩度および色相と彩度相関データおよび前記色相相関データとに基づいて撮像領域D内における樹脂層3の形成領域を検出する領域検出処理、並びに彩度および色相のうちのいずれか一方の情報と彩度相関データおよび色相相関データのうちのこの一方の情報に対応する一方の相関データとに基づいて形成領域における樹脂層3の厚みを測定する厚み測定処理を実行する画像処理部7とを備えている。
(もっと読む)
移動検出装置、移動検出方法および記録装置
【課題】 ダイレクトセンシングにおいて、第1画像データのテンプレート領域が第2画像データの撮像領域から外れてしまう可能性を低減する。
【解決手段】 第1画像データにおけるテンプレート領域が、第2画像データの中で物体の移動と直交する方向において変位する変位方向と変位量を取得する。取得した変位方向と変位量に基づいて前記方向においてテンプレートパターンを切り出す位置を設定する。
(もっと読む)
塗布状態検査方法
【課題】粘性材料が濡れ広がり易い材質からなる場合や、光の反射が不順になり易い材質からなる場合であっても、塗布対象上への塗布状態の正確な検査結果を得ることができる塗布状態検査方法を提供することを目的とする。
【解決手段】基板Pb上に所定の描画パターンで塗布されたペーストPstを撮像してその画像を取り込んだ後(ステップST1)、その取り込んだ画像に基づいて、基板Pb上に塗布されたペーストPstの輪郭Gを抽出し(ステップST2)、その抽出したペーストPstの輪郭GからペーストPstの輪郭長を求める(ステップST3)。そして、求めたペーストPstの輪郭長をそのペーストPstの描画パターンに対応して定められた輪郭長の基準範囲と比較し、ペーストPstの輪郭長が基準範囲内にあるかどうかの判定を行って(ステップST4〜ST6)、ペーストPstの塗布状態の良否判断を行う(ステップST7及びST8)。
(もっと読む)
セラミックシートの検査方法およびセラミックシートの製造方法
【課題】本発明は、セラミックシートの自動的な検査にも適用できるものであり、大量のセラミックシートから反りなどの欠陥を効率良く且つ正確に検出するための方法を提供することを目的とする。
【解決手段】本発明に係るセラミックシート(但し、固体酸化物形燃料電池の固体電解質膜用セラミックシートを除く)の検査方法は、当該セラミックシートの反りを三角測距式変位センサーで検出する工程;および、次に、セラミックシートの表面および内部に存在する欠陥を透過型光電センサーで検出する工程を含むことを特徴とする。
(もっと読む)
高速高解像度三次元太陽電池検査システム
光学検査システム及び方法が提供される。加工対象物輸送機構が加工対象物(12)をノンストップで移動させる。照明装置(40)が、ライトパイプを含み、第一及び第二のストロボ照明野タイプを提供するように構成されている。第一(3)及び第二(5)のカメラ(2)アレイが、加工対象物(12)の立体画像化を提供するために配設されている。第一のカメラアレイ(3)は、第一の照明野を用いて加工対象物(12)の第一の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第二の複数の画像を生成するように構成されている。第二のカメラアレイ(5)は、第一の照明野を用いて加工対象物(12)の第三の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第四の複数の画像を生成するように構成されている。処理装置が、第一、第二、第三及び第四の複数の画像の少なくともいくつかを記憶し、他の装置に提供する。 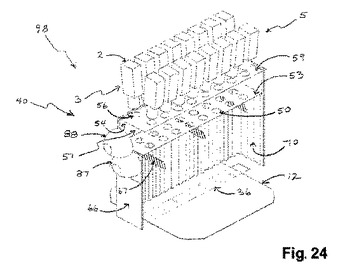 (もっと読む)
(もっと読む)
固体酸化物形燃料電池の固体電解質膜用セラミックシートの検査方法および当該セラミックシートの製造方法
【課題】本発明は、セラミックシートの自動的な検査にも適用できるものであり、大量のセラミックシートから反りなどの欠陥を効率良く且つ正確に検出するための方法を提供することを目的とする。
【解決手段】本発明に係る固体酸化物形燃料電池の固体電解質膜用セラミックシートの検査方法は、当該セラミックシートの反りを三角測距式変位センサーで検出する工程;および、次に、セラミックシートの表面および内部に存在する欠陥を透過型光電センサーで検出する工程を含むことを特徴とする。
(もっと読む)
シート類の外形寸法測定装置
【課題】コンベア上を移動中するシート類を、精度良く寸法測定する装置を、安価で小型なものを提供する。
【解決手段】コンベア上に2台のカメラを配置し、コンベア上を搬送するシート類寸がカメラ直下に到達したときに初回の撮影を行い、被測定部材が離脱したときに2回目の撮影を行う。2台のカメラ間隔測定データと、初回から2回目の撮影の間のシート類移動量計測データと、4つの画像データを演算することにより、シート類の移動方向寸法、幅寸法およびシート類の角度計測可能にした。
(もっと読む)
凹凸形状を抽出するための画像処理方法及び画像処理装置
【課題】縦振動を引き起こしている状況下でも、凹凸形状を精度高く読取ることができるようにする。
【解決手段】凹凸形状が施され且つ該凹凸形状の凹凸方向に沿った振動を起こしている刻印面から、凹凸形状を抽出するための画像処理方法であって、刻印面に対して一方向に走査することで、凹凸形状の高さデータを有する2次元形状データを取得する走査ステップと、高さデータの変化度合いを求めるために、2次元形状データを微分する微分ステップと、微分ステップの結果を基に、2次元形状データから高さデータの変化度合いが急峻なものを除去するスパイク除去ステップと、スパイク除去ステップの結果を積分して振動波形を推定する積分ステップと、2次元形状データから、積分ステップで推定した振動波形を減じることで凹凸形状に相当する刻印波形を算出する凹凸検出ステップとを有する。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに、蛍光体マーカー74を備えたステージ72と、前記ワークWと前記蛍光体マーカー74とを所定の露光時間で撮像するカメラ20と、前記カメラ20の露光時間より短い周期で前記蛍光体マーカー74を点滅発光させるマーカー制御部45と、を備え、前記カメラ20により撮像されたボケ画像から前記蛍光体マーカー74の軌跡画像100を抽出して、前記軌跡画像100から点拡散関数を算出する点拡散関数算出部35と、算出した前記点拡散関数を用いて、前記ボケ画像を画像変換し前記ボケ画像からボケていない元画像を生成する画像生成部37と、前記元画像から前記ワークWの位置を算出する位置算出部39と、を有するロボットシステム5。
(もっと読む)
位置測定装置及び位置測定方法
【課題】測定対象物の測定範囲が撮像領域と比較して極小・広大の何れの場合であってもその測定対象物の表面上の位置を測定可能な位置測定装置及び位置測定方法を提供する。
【解決手段】ワーク26よりも小さい寸法の撮像領域30を有する撮像素子50を、ワーク26の表面32上を相対的に移動させながら、ワーク26の表面32を撮像する。撮像領域30内の画像I(t)からワーク26の表面32上の模様(例えば、丸型溝82)を抽出し、抽出された前記模様の、撮像領域30内の画像I(t+1)中での変位量を検出し、検出された前記変位量及び前記寸法に基づいてワーク26の表面32上の位置を測定する。
(もっと読む)
塗装不良検査方法
【課題】凹凸面を有しこの凹凸面に塗膜が形成された基材に対して光を照射すると共に前記塗膜からの反射光を検出し、この反射光の強度に基づいて塗装不良を検出するにあたり、塗装不良の有無を正確且つ容易に判定することができる塗装不良検査方法を提供する。
【解決手段】平坦面を有しこの平坦面に前記塗膜と同一組成の判定用塗膜が形成された判定用基材4に光を照射すると共に塗膜からの反射光を検出する。光の入射方向に対する前記判定用基材4の角度θが所定の角度以上の場合の反射光の最大強度を除外強度とする。基材の塗膜からの反射光の強度に基づいて塗装不良を検出する際に、前記除外強度以下の強度の反射光の検出結果を除外する。
(もっと読む)
帯状部材の形状検出方法とその装置及び変位量計測装置
【課題】カメラの台数を増やすことなく、帯状部材の端部位置などの複数箇所の変位量を計測して、帯状部材の形状を効率よく検出する。
【解決手段】センサーヘッド11を、帯状のタイヤ構成部材40の幅方向の異なる計測点A,Bにレーザー光をそれぞれ照射する第1及び第2のレーザー装置11a,11bと、レーザー光の照射部を撮影するカメラ11cと、反射光の受光位置から計測点A,Bの変位量hA,hBを計測する計測部11dと、反射光の光路を変更してこれをカメラ11cに入射させる光学素子群11Mとから構成するとともに、第1及び第2のレーザー装置11a,11bを排他的に点灯させるセンサーヘッド制御手段12を設けて、所定の速度で回転する成型ドラム21に貼り付けられた帯状のタイヤ構成部材40の、タイヤ幅方向の異なる2箇所の変位量hA,hBを計測して、帯状のタイヤ構成部材40の形状を検出する。
(もっと読む)
焼結原料の装入状態測定装置および焼結鉱の製造方法
【課題】焼結機の原料装入層の幅方向全体に渡って層厚を測定でき、これにより装入全体の状態を把握して高生産率で焼結鉱を製造できる、焼結原料の装入状態測定装置および焼結鉱の製造方法を提供すること。
【解決手段】焼結機パレット上に装入された焼結原料を焼結して焼結鉱を製造するドワイトライト式焼結機において、焼結機パレット上に装入された焼結原料からなる原料装入層35の層厚を測定するために用いる装置であって、焼結パレット上部の所定の高さ位置に固定されたレーザー距離計30と、該レーザー距離計を焼結機幅方向の断面内で回転させる回転機構とを有し、回転によりレーザー距離計30で原料装入層35の表面を走査することで、該原料装入層の層厚を焼結機幅方向に連続的に測定する焼結原料の装入状態測定装置を用いる。複数のレーザー距離計30が、焼結パレット幅方向に所定の間隔で配置され、同調して回転させることが好ましい。
(もっと読む)
画像処理方法及び画像処理装置
【課題】テンプレートマッチングの位置検出精度向上
【解決手段】テンプレート画像データと被探索画像データとにより相関分布を求め、当該相関分布の特性から被探索パターンの位置検索を行う画像処理方法において、テンプレート画像に対して基準画像を所定の移動距離単位で相対的に直進移動させて理想的な標準相関分布を求め、被探索画像の相関分布と標準相関分布の各々について尖度を求め、標準相関分布の尖度と被探索画像の相関分布の尖度とを比較すると共に、当該各尖度の比較結果に応じて、被探索画像の最大相関値となる最大相関位置を前記画像移動方向における画像一致位置とするか、相関分布の頂上部の加重平均位置を画像一致位置とするかを判定する。
(もっと読む)
光反射型部品検出システム及びこれを用いた部品搬送装置
【課題】光反射型部品検出システムにおいて、検出環境に応じた判別条件の設定を容易にするとともに判別の確実性を得る。
【解決手段】本発明の光反射型部品検出システム110は、搬送される部品が通過する搬送経路102中に設定された既定の検出範囲Spからの反射光の量を検出する受光素子117と、該受光素子で検出された前記反射光の量を所定の判別条件に基づいて判別する判別手段120とを具備する光反射型部品検出システムにおいて、前記検出範囲の背後に光反射面114aを備えた動作部材114を配置し、該動作部材を動作させて前記光反射面の位置又は姿勢を変化させることで前記検出範囲に前記部品が配置されていないときの背景からの反射光量が変化するように構成されていることを特徴とする。
(もっと読む)
溶接ワーク形状測定装置及びそのプログラム
【課題】溶接中のワークにおける溶接予定部位の形状を光切断法により測定するにあたり,その溶接予定部位におけるシート光の反射率のばらつきが大きい場合でも,溶接部位からのスパッタのノイズの影響を回避して光切断線の像の位置を検出できること。
【解決手段】時系列の入力画像データを加算することにより合成した加算画像データを算出し(S2),前記時系列の入力画像データにおける時系列変化が所定値を超える部分をマスク領域に設定し(S3),前記加算画像データにおける前記マスク領域に対するマスク処理によって処理対象画像データを算出し(S4),前記処理対象画像データから前記溶接予定部位に形成された光切断線の像の位置を検出する(S5,S6)。
(もっと読む)
81 - 100 / 322
[ Back to top ]