
Fターム[2F065QQ28]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の特定位置の検出 (2,005)
Fターム[2F065QQ28]の下位に属するFターム
極大値又は極小値をとる位置 (1,089)
ゼロクロス点;基準値との一致点 (28)
Fターム[2F065QQ28]に分類される特許
61 - 80 / 888
3次元相対座標計測装置およびその方法
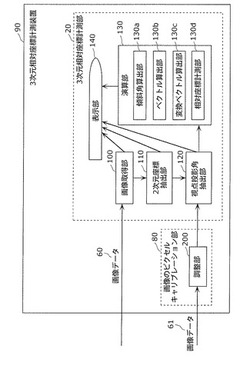
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
FPDモジュール組立装置及び表示基板の搬送方法

【課題】表示基板に設けられたアライメントマークを撮像範囲の適正位置に出現させて、表示基板の搬送を安定化させることができるFPDモジュール組立装置および表示基板の搬送方法を提供する。
【解決手段】FPDモジュール組立装置は、複数の処理ユニットと、搬送部と、カメラと、制御部とを備えている。制御部は、表示基板の生産ロットが変更されると、カメラによって撮像されたアライメントマークの座標を検出し、検出回数が所定の回数になると、検出した複数の座標の平均及び標準偏差σを算出する。そして、複数の座標から−1.5σ<P<1.5σを満たす座標を抽出し、抽出した座標の平均に基づいて搬送部による表示基板の受取位置を補正する。
(もっと読む)
検査装置および検査方法
【課題】簡素化を図りつつ、対象物を短時間で高精度に検査することができる。
【解決手段】撮像手段11と対象物Tとの間に光軸Oに交差する方向に向けて光線Lを放射する光源12と、光源12から放射された光線Lを撮像手段11の光軸O方向に沿って対象物T側に向けて反射するハーフミラー13と、ハーフミラー13と対象物Tとの間に光軸Oと同軸に配置され、外周面14aにハーフミラー13により反射された光線Lが入射する円錐状または円錐台状の内ミラー部材14と、内ミラー部材14よりも大径の円錐台状の孔部15が光軸Oと同軸に貫設され、孔部15の内周面15aに内ミラー部材14の外周面14aにより反射された光線Lが入射する外ミラー部材16とを備え、外ミラー部材16は、内ミラー部材14の外周面14aから孔部15の内周面15aに入射した光線Lを、対象物Tの外周面T1に垂直に入射するように反射する検査装置10を提供する。
(もっと読む)
形状測定装置並びに深さ測定装置及び膜厚測定装置
【課題】試料表面の変位量が大きくても、フェーズラッピングの問題が生ずることなく、試料の微細な表面形状を高分解能で測定できる形状測定装置を実現する。
【解決手段】白色光源から出射した照明光は、入射光をシャーリングする第1の光路と入射光に対して可変光路長ないし可変位相量を導入してフリンジスキャンを行う第2の光路とを有する干渉光学系及び対物レンズを経て試料に入射する。試料上には、シャーリングされた参照ビームにより形成される第1の照明領域とフリンジスキャンされた測定ビームにより形成される第2の照明領域が形成される。第1及び第2の照明領域から出射した反射光は、対物レンズ及び干渉光学系を介して2次元撮像装置に入射し、2つの照明領域の画像が合成された干渉画像が形成される。フリンジスキャンにより、2つの画像を構成する反射光間に白色干渉が発生し、干渉信号を検出することで、試料の形状又は孔の深さが測定される。
(もっと読む)
孔形状検査方法および孔形状検査プログラム
【課題】被検出形状に縁部における輝度変化を除去し、欠けや異物の検出を確実に行える孔形状検査方法および孔形状検査プログラムを提供する。
【解決手段】孔形状良否を判定する孔形状検査方法およびプログラムであって、前記孔の孔形状撮像工程と、前記孔形状画像の2値化画像形成工程と、前記孔の面積が既定値であるかを判定する孔面積判定工程と、前記孔の内形状の孔重心を求める孔重心演算工程と、前記孔形状画像に前記孔重心を中心とする同心フィルターをかけ、前記孔重心を中心とする同心形状上の画素の平均輝度と、1画素の画素輝度と、の差によるフィルタリング画像形成工程と、前記フィルタリング画像の2値化フィルタリング画像形成工程とを有し、前記2値化フィルタリング画像の画素数が所定の値以下である場合、前記孔を良品と判定する良否判定工程を有する孔形状検査方法、およびその検査方法をコンピューターに実行させるプログラム。
(もっと読む)
三次元計測装置
【課題】三次元計測を行うにあたり、計測効率の低下を抑制しつつ、計測精度の向上等を図ることのできる三次元計測装置を提供する。
【解決手段】基板検査装置10は、プリント基板1を搬送するコンベア13と、プリント基板1の表面に対し斜め上方から所定の光を照射する照明装置14と、当該光の照射されたプリント基板1を撮像するカメラ15とを備えている。照明装置14は、第1照明14A〜第8照明14Hを備えている。そして、三次元計測を目的として第1輝度のパターン光の下で複数回の撮像が行われる合間に、三次元計測を目的とした第2輝度のパターン光の下での複数回の撮像や、輝度画像データを取得することを目的とした第1輝度及び第2輝度の各色成分の均一光の下での撮像が行われる。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
検出対象物について頭部分の位置および軸部分の方向を算出する方法、装置およびプログラム
【課題】第1の径を有する軸部分と、軸部分の一端に設けられた第1の径より大きな第2の径を有する頭部分とを含む検出対象物について、頭部分の位置および軸部分の方向をより高速に算出する方法、装置およびプログラムを提供する。
【解決手段】本方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、入力画像から、軸部分に相当する領域を軸領域として抽出するステップと、入力画像内の明るさの変化から頭部分の候補位置を抽出するステップと、軸領域および候補位置についての高さ情報を取得するステップと、軸領域との間の相対的な位置関係から、軸領域に対応する検出対象物の頭部分に相当する位置を候補位置から抽出するステップとを含む。
(もっと読む)
形状測定装置およびこれに用いる光学フィルタ
【課題】装置構造を大型化することなく、光切断法によって至近距離から大型な被測定物の形状を精度よく測定できること。
【解決手段】本発明の一態様にかかる形状測定装置1は、被測定物15にスリット光L1を照射し、被測定物15から反射したスリット光L1をフィルタ3を介して撮像するとともにスリット光L1以外を遮光して、被測定物15の形状を測定する。フィルタ3の中心透過波長は、レンズ4の光軸C近傍においてスリット光L1の主ピーク波長と同等であり、スリット光L1の入射面に沿って光軸Cからフィルタ3の縁側に向けて大きくなる。
(もっと読む)
変位検出装置
【課題】高い回折効率を示し、精度良く位置検出を行える変位検出装置を提供することを目的とする。
【解決手段】台形または矩形のレリーフ形状をした回折格子を用いる。また、可干渉光を出射する光源部と、光源部から出射された光束を二つの光束に分割する光束分割部と、を含み、二つの光束をP偏光として回折格子上に照射させる照射光学系と、二つの光束が回折格子により回折されることによって生じる二つの第1回折光をそれぞれ反射し、回折格子上にP偏光として再入射させる反射光学系を備える。また、回折格子に再入射した二つの第1回折光が回折されて生じる二つの第2回折光を干渉させる干渉光学系と、干渉光学系により干渉した光を受光する受光部と、受光部において取得した干渉信号に基づいて、回折格子の位置情報を検出する位置検出部を備えるものとする。そして、回折格子のレリーフの周期を、回折格子に入射する可干渉光の波長の1.5倍以下とする。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】PTPシートの製造過程における錠剤の欠け等の検査に際し、検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、目標となる錠剤の輪郭に関し、重心を原点とする各角度毎の複数の各点の接線の向き情報を目標向き情報として記憶しておき、検査に際し、抽出された錠剤の輪郭に基づき重心を特定するとともに、前記各角度毎の対応する各交点の接線の向き情報を求め、当該接線の向き情報と目標向き情報とを比較する。そして、1の交点の接線の向き情報が、対応する目標向き情報に対し許容範囲を逸脱している場合に、不良候補として判定する。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
金属缶端部の巻締検査装置及び検査方法
【課題】簡単な構成にて巻締め検査を精度よく行える金属缶端部の巻締検査装置及び検査方法を提供する。
【解決手段】カメラ32からの取得画像から極座標展開画像112を形成し(S4)、巻締め部3内側側面61の内側フランジエッジ122と(S5)、外側側面62の外側フランジエッジ124を認識して(S6)、内側フランジエッジ122から外側フランジエッジ124までの幅寸法131が閾値内にあるか否かを判断する(S8)。閾値内の場合、内側側面61の内帯幅161の長さ方向での変化量、及び外側側面62の外帯幅162の長さ方向での変化量を検査し(S9)、これらの変化が大きい場合、巻締不良フラグをセットして(S10)終了する一方、変化が小さい場合には、巻締不良フラグをリセットして(S11)終了する。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
光学式プローブ
【課題】光学系に可動機構を備えることなく、測定対象物の形状を逐次測定することが可能な光学式プローブを提供する。
【解決手段】レーザ光を出射するレーザ光源と、レーザ光源により出射されたレーザ光を平行光とするコリメータレンズと、コリメータレンズにより平行光とされたレーザ光をライン形状の光に変形する光形状変形手段と、光形状変形手段により変形されたライン形状の光を測定対象物に対して選択的に照射させる光照射手段と、光照射手段により選択的に照射されて測定対象物の表面にて反射されたレーザ光に基づいて測定対象物の画像を撮像する撮像手段と、光照射手段によるライン形状の光の照射を制御する制御手段と、を備え、制御手段は、光照射手段において、ライン形状の光の一端部から他端部まで所定の範囲ずつ順次光を照射させる。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】光ビーム照射装置の空間的光変調器の傾きとヘッド部の傾きとを容易に判別して、光ビームの歪みを抑制し、描画精度を向上させる。
【解決手段】光ビーム照射装置20から照射される光ビームを受光する受光装置51をチャック10に設け、光ビーム照射装置20のヘッド部20aを回転する回転機構28を設ける。回転機構28によりヘッド部20aを回転する前と回転した後に、光ビーム照射装置20から照射された光ビームを受光装置51により受光する。ヘッド部20aを回転する前後の、受光装置51により受光した光ビームの位置の変化から、光ビーム照射装置20の空間的光変調器25の傾きとヘッド部20aの傾きとを判別し、判別結果に基づき、空間的光変調器の傾き又はヘッド部20aの傾きを補正する。
(もっと読む)
ステレオカメラ較正装置およびステレオカメラ較正方法
【課題】マーカを設置するための較正用ポールの本数を少なくする。
【解決手段】回転可能であり、回転角の調整によって電子カメラによる第1、第2マーカの撮影を可能とする可動ミラーと、可動ミラーの回転角を取得する回転角取得装置12と、電子カメラの撮像面に対する第1、第2マーカの投影点の位置を検出する投影点検出装置13と、電子カメラのカメラ要素の相対的な位置関係、可動ミラーの回転中心軸の位置および第1、第2マーカの位置を記憶する記憶部15と、カメラ要素の相対的な位置関係、回転中心軸の位置、第1、第2マーカの位置、可動ミラーの回転角および第1、第2マーカの投影点の位置から電子カメラの位置および向きを算出するカメラ位置算出部18とを設ける。
(もっと読む)
61 - 80 / 888
[ Back to top ]