
Fターム[2F065QQ28]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の特定位置の検出 (2,005)
Fターム[2F065QQ28]の下位に属するFターム
極大値又は極小値をとる位置 (1,089)
ゼロクロス点;基準値との一致点 (28)
Fターム[2F065QQ28]に分類される特許
41 - 60 / 888
遊戯板の障害釘の高さ検査装置および検査方法と遊戯盤
【課題】遊戯盤に植設される釘は植設される位置、および高さが所定の範囲内でなければならない。しかし、所定の高さより高い釘を見つける方法は、すでに開示されているが、所定の高さより低い釘を高速にしかも釘にダメージを与えることなく見つけるのに、適した方法はなかった。
【解決手段】前記遊戯盤を所定の速度で搬送する移送手段と、前記遊戯盤の垂直方向に視軸が配置された第1のラインセンサと、視軸が前記第1のラインセンサの視軸から所定の角度傾き、かつ前記視軸が前記第1のラインセンサの視軸と交わる交線が、前記遊戯盤の前記釘の頭と同じ高さに配置される第2のラインセンサと、前記釘の頭を前記第1のラインセンサが撮影した地点と前記第2のラインセンサが撮影した地点の間の距離に基づいて、前記釘の高さを算出する制御装置を有する検出する検査装置。
(もっと読む)
撮像装置及びこれを備えた物体検出装置並びに偏光フィルタ

【課題】湾曲面からの反射光を適切にカットし又は湾曲面からの反射光を適切に選択して透過させることを課題とする。
【解決手段】湾曲したフロントガラス面に対する相対位置が一定となるように設置され、そのフロントガラス面からの反射光(水平偏光成分S)をカットする鉛直偏光領域を備えた偏光フィルタ層を介して、撮像領域からの光を画像センサ206上の各撮像画素で受光して撮像する撮像装置において、上記鉛直偏光領域は、透過軸方向が異なる複数のフィルタ領域部分から構成されており、各フィルタ領域部分の透過軸方向は、当該フィルタ領域部分へ入射してくるフロントガラス面上からの反射光の最大偏光成分の偏光方向に基づいて設定される。
(もっと読む)
温度計測システム、基板処理装置及び温度計測方法
【課題】光干渉を利用して温度を適切に測定することができる温度計測システム、基板処理装置及び温度計測方法を提供する。
【解決手段】温度計測システム1は、光源10、分光器14、光伝達機構11,12、光路長算出部16及び温度算出部20を備える。光源10は、測定光を発生させる。光伝達機構11,12は、測定対象物13の表面13a及び裏面13bからの反射光を分光器14へ出射する。分光器14は、反射光の強度分布である干渉強度分布を測定する。光路長算出部16は、フーリエ変換し光路長を算出する。温度算出部20は、光路長と温度との関係に基づいて測定対象物13の温度を算出する。光源10は、分光器14の波長スパンΔwに基づいた条件を満たす半値半幅Δλの光源スペクトルを有する。分光器14は、波長スパンΔwと計測最大厚さdとに基づいた条件を満たすサンプリング数Ncで強度分布を測定する。
(もっと読む)
3次元計測装置と3次元計測方法
【課題】ライン光が撮影手段に向けて正反射されることがなく、撮影が困難になることを防止する。
【解決手段】被検査体1にライン光4を照射して両者を相対移動させながら撮影手段26で撮影することにより、光切断法によって被検査体1を3次元計測することができる。上記被検査体1は、ワークに予め定められた配列方向Aに配列して設けられた複数の凹凸状部分3を有しており、この凹凸状部分3は、上記配列方向Aと直交する方向の直線部分3aを有している。上記ライン光4の相対移動方向Bと、この相対移動方向に対するライン光の角度θとは、該ライン光4が上記直線部分3aに対して斜めに交差して照射されながら相対移動されるように予め設定されている。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
欠陥計測方法
【課題】光学素子の欠陥を簡便に発見、測定することのできる欠陥計測方法を提供する。
【解決手段】第一の観点に係る欠陥計測方法は、測定対象に光源から光を照射し、収束光にして測定対象に入射し、測定対象又は光源を、収束光の焦点が測定対象の一方の面から他方の面に至るまで移動させ、測定対象の一方の面と測定対象中に存在した欠陥との間の距離を計測し、距離に測定対象の屈折率を乗じた値を求め、一方の面からの前記欠陥の深さを計算する。
(もっと読む)
複数カメラの校正方法及び校正システム
【課題】カメラ校正における場所的な要求や演算負荷の要求をできるだけ低減し、車両の組み立てラインに組み込むことが容易となる、複数カメラの校正技術を提供する。
【解決手段】第1校正場の所定位置に当該車両を位置決めし、第1カメラによる基本撮影画像を取得し、基本撮影画像における基本校正指標群の画像上の位置である基本画像座標を算定し、基本校正指標群のワールド座標と基本画像座標との関係を表す第1校正関数を算定する。第2校正場に移動し、第1カメラによる第1撮影画像から第1画像座標を算定し、第2カメラによる第2撮影画像から第2画像座標を算定し、第1画像座標及び第1校正関数及び第1校正指標群のワールド座標を用いて車両姿勢ずれを算定する。車両姿勢ずれと第2画像座標と第2校正指標群のワールド座標とに基づいて、第2画像座標と第2校正指標群のワールド座標との関係を表す第2校正関数を算定する。
(もっと読む)
3次元範囲計測システム、3次元範囲計測プログラムおよび記録媒体
【課題】自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供する。
【解決手段】3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20と、運転者12の視線方向を計測する車内カメラ30と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20は等距離射影式の魚眼レンズカメラを用い、透視投影モデルに変換しない二眼ステレオ法を考案した。車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とした。
(もっと読む)
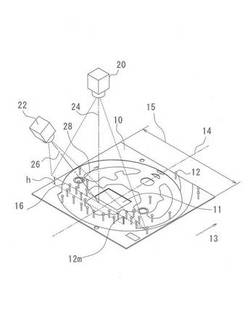
3次元形状の取得装置、処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28、32と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28、32で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。さらに、カメラ28と32の整合性を調べることで3次元形状の精度向上が実現される。
(もっと読む)
レーザ干渉測定装置の横座標校正治具および横座標校正方法
【課題】収束光学系を有するレーザ干渉測定装置における測定面上の位置の校正が簡便かつ高精度に行えるレーザ干渉測定装置の横座標校正治具および横座標校正方法を提供すること。
【解決手段】横座標校正治具10は、マーカを有する画像を投影する画像投影手段19と、画像投影手段19を第1回動軸線A1まわりに回動自在に支持しかつ第1回動軸線が所定の回動中心Cを通る第1支持機構11と、第1支持機構を第2回動軸線A2まわりに回動自在に支持しかつ第2回動軸線が回動中心Cで第1回動軸線A1と交叉する第2支持機構12と、を有する。
(もっと読む)
ホースクリップ組付け状態検査方法
【課題】ホースクリップが周方向の所定位置に組付けられているかどうかを容易に管理することが可能なホースクリップ組付け状態検査方法を提供する。
【解決手段】ゴムホース及びこのゴムホースに組み付けられたホースクリップをカメラで撮像する工程と、これらのゴムホース及びホースクリップの画像を検査パターンに画像処理する工程と、この検査パターンを、予めホースクリップの合格パターンとして記憶されたホースクリップの所定周方向組付け位置のパターンと比較する工程と、ホースクリップの周方向組付け位置の合否を判定する工程と、を備える。
(もっと読む)
画像処理方法および装置
【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
3次元計測方法
【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
円筒部材の検査法および検査装置
【課題】被検査対象物であるワークに対して加工したり、他の部位を装着したりすることなく、ワーク全周の疵を安定して検出することが可能な検査方法および検査装置を提供する。
【解決手段】ワークWの円筒面を検査部4にて検査するための検査装置および検査方法である。回転軸心L1,L2が相互に平行に配設されている一対の回転軸11,12にてワークを支持させた状態で、回転体11,12をワークに接触させる。一対の回転軸11,12を回転駆動させることにより、回転体31をワークとともに回転させる。回転軸11,12とワークWとの間に滑りが生じることなくワークWがその軸心廻りに1回転する基準時間での回転体31の回転状態を検出する。回転状態に基づいてワークWと回転軸11,12との間に滑りがあるか否かを判断しつつ、ワークWの画像を撮像する。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
シート状部材の巻き付け状態の検査方法及び検査装置
【課題】成形ドラムに巻き付けられたシート状部材の巻き付け状態を精度良く測定する。
【解決手段】ドラム周方向Cに沿った検出範囲Dを持つ二次元レーザセンサ12を用い、成形ドラム50をドラム幅方向Xに移動させながら、成形ドラム50に巻き付けられたシート状部材70に対し、シート状部材70の全幅を含む範囲で二次元レーザセンサ12によりレーザ光Lを照射して、反射面までの距離データを取得し、得られた距離データに基づいてシート状部材70の幅方向両端部78,80の位置を求める。好ましくは、成形ドラム50の全幅を含む範囲で上記距離データを取得し、成形ドラム50の幅方向両端部62,64の位置も求めることである。また、シート状部材70の接合部76が二次元レーザセンサ12の検出範囲D内に入るように位置合わせした上で、上記距離データを取得して、接合部76を検査することが好ましい。
(もっと読む)
測定装置
【課題】スピンドルに取り付けられて高い回転数で回転する極小径丸棒若しくは極小径工具の動的振れを測定可能な極めて実用性に秀れた測定装置の提供。
【解決手段】光源と、光源からの光線を被測定部材へ導くレンズ系と、被測定部材を介して光線を受光する複数のフォトダイオードとを備える光学系を有し、フォトダイオードでの受光量をもとに被測定部材の位置若しくは振れ量を測定する測定装置であって、光学系の光軸方向視において、複数のフォトダイオードにして被測定部材の軸心と交差する辺部が全て直線であり、複数のフォトダイオード間には、被測定部材の軸方向に対して傾斜する少なくとも1つのギャップを設け、このギャップの両端部は被測定部材の外形より外方に位置させ、ギャップを形成するフォトダイオードの辺部以外の被測定部材の軸心と交差する辺部がギャップと平行でないように構成する。
(もっと読む)
3次元相対座標計測装置およびその方法
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
タイヤ状態検出方法及び装置
【課題】タイヤのスリップ角とキャンバー角を同時に効率よく測定でき、かつタイヤの交換を容易に行うことができるタイヤ状態検出方法及び装置を提供する。
【解決手段】撮像カメラ16で撮像した角度検出用回転体14の画像データを基にタイヤ1204のキャンバー角αを求め、さらに、撮像カメラ16で撮像した走行路面28の画像データと角度検出用回転体14の画像データを基にタイヤ1204のスリップ角βを求める構成にした。
(もっと読む)
溶接位置の検査方法及びその装置
【課題】
簡単な構成を用いて検査範囲の照度を均一化して検査領域を広範囲とし、溶接部の円形輪郭の全周を抽出し高精度に溶接部の位置を検出することで、所望の位置に溶接が施されているかを検査すること。
【解決手段】
本発明は、上記課題を解決するために、検査対象表面の2次元検査領域に対して傾斜した角度で異なる少なくとも2方向から前記2次元検査領域を照明すると共に、該2次元検査領域に対向した位置から前記異なる少なくとも2方向から照明された複数の画像を取得し、該複数の取得した画像から溶接部のくぼみ傾斜部分に対応する輪郭情報をそれぞれ抽出し、該抽出した複数の輪郭情報を合成することで円形の輪郭を得、該円形の輪郭に円を当てはめて前記溶接部として認識し、該溶接部として認識した円の中心座標を溶接位置とすることを特徴とする。
(もっと読む)
41 - 60 / 888
[ Back to top ]