
Fターム[2F069GG58]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279)
Fターム[2F069GG58]の下位に属するFターム
異種の検出器を用いるもの (175)
Fターム[2F069GG58]に分類される特許
41 - 60 / 104
回転体測定方法
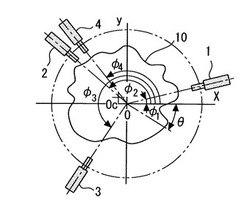
【課題】高次の次数kを考えた場合でも、正しく計算できない次数kが出てくるということがなく、回転体の形状r(θ)、ひいては回転振れ量x(θ)、y(θ)を正しく求めることができる回転体測定装置20および方法を提供する。
【解決手段】4本以上の検出器を用いて、(22)式および(23)式の分母にくる倍率係数α1k、β1k等が均一になる検出器の角度配置を複数組選択する。(22)式および(23)式の分母が0となる部分は複数組の間で補完しあうように倍率H1k、H2k(結果的に倍率係数α1k、β1k等)を選択する。この補完しあう倍率係数α1k、β1k等(結果的にAak、Bak)を用いて形状r(θ)と回転振れ量x(θ)、y(θ)を求める。
(もっと読む)
円筒体の形状測定方法および同装置

【課題】測定装置の複雑化を招くことなく、形状測定の信頼性を確保することができる円筒体の形状測定方法を提供する。
【解決手段】円筒体90の両側端部近傍の内周面92に一対の基準部20,20を当接させたまま円筒体90を回転させ、円筒体90の外側から基準部20,20に対峙する位置31,31において、円筒体90の回転に伴う前記円筒体90の外周面91の半径方向の変位量を変位検出器によって検出する。一方、形状測定されるべき円筒体90が存在しないときに、この円筒体90の変位量測定を行う変位検出器を用いて基準部の位置検出を行い、形状測定の基準とする基準部20,20の位置ずれを未然に検出する。
(もっと読む)
転炉排ガス処理装置のスカート位置検出器異常検知方法およびその異常検知に係るスカート位置修正制御方法
【課題】対になった位置検出器同士の平均値をそれぞれ求めて位置検出器の異常を判定すると共に異常の位置検出器を除外し適正な平均値を用いて位置修正操作を行う転炉排ガス処理装置のスカート位置検出器異常検知方法およびその異常検知に係るスカート位置修正制御方法を提供する。
【解決手段】各対となる位置検出器の信号出力から平均値1及び平均値2を第1及び第2の平均値演算器21、22により求める。検出器誤差監視手段27はこれらの平均値の差を求める。異常判別手段28はこの平均値の差がある定数以上であれば位置検出器の異常を判定する。異常と判定した場合にはオペレータが関与するスイッチ制御手段30に出力する。スイッチ制御手段30は、位置修正が必要な位置検出器に係る位置修正演算器HhnのスイッチのみONし、位置修正演算した出力を平均値演算器21又は22のいずれかに出力する。
(もっと読む)
プレス金型の動的変形測定法及び動的変形測定システム
【課題】プレス加工に係る上型と下型の動的変形を絶対的に捉え、プレス成型品に成型不良が発生した場合の金型の修正に迅速に対応できるようにする。
【解決手段】上型7および下型8に複数の測定ポイントを設定して、その各測定ポイントに加速度センサSa,Sbを配置し、上型7と下型8の両者にプレス荷重を作用させたときの加速度センサSa,Sbの出力(加速度信号)を数値解析装置10に入力する。数値解析装置10では、加速度信号を補正回路15Aに通して加速度センサSa,Saの出力電圧変動による誤差を補正した後、その加速度信号を積分回路15Bにより積分して速度信号を生成する。又、積分回路15Bの出力を補正回路15Cに通して数値解析上の誤差を補正した後、その速度信号を積分回路15Dにより積分して変位信号を生成する。そして、その変位信号を数値化あるいはグラフ化して表示装置20に表示する。
(もっと読む)
クレーンの積み降ろし位置決定方法およびその装置
【課題】クレーンで吊り上げた被搬送物を地上運搬車の荷台に精度よく積載するための積み降ろし位置決定方法と積み降ろし位置決定装置を提供する。
【解決手段】クレーンで吊り上げた被搬送物を停車した地上運搬車の荷台に積み降ろすに際し、地上運搬車の停車位置の後方に設置した距離センサーで荷台後部の左右両幅端部の位置を測定し、該両幅端部の位置から荷台の幅方向の中心を求め、この中心と吊り上げた被搬送物の幅方向中心とが一致するようクレーンを移動させ、その後、被搬送物を荷台上に積み降ろすことを特徴とするクレーンの積み降ろし位置決定方法。
(もっと読む)
形状測定装置、形状測定方法
【課題】様々な厚みの測定試料の表面形状を測定する場合でも、事前の校正作業工数の増大を伴うことなく、高い測定精度を確保して測定できること。
【解決手段】変位計2で測定位置を2次元方向に走査させつつ得られる計測値から測定ウェハ4の表面形状を測定する場合に、測定ウェハ4と厚みが異なるが材料及び平面視した形状が同じ基準ウェハの厚み、及びそれが支持部1で支持された場合の自重による撓み量、並びに走査手段3の走査ぶれ量を予め記憶し、対向配置した変位計2a,2bによる測定ウェハ4の厚み計測、変位計2による測定ウェハ4の表面変位計測を行い、計算機7により、予め記憶された基準ウェハの厚み及び自重撓み量と測定ウェハの厚み計測値とにより、測定ウェハ4の自重撓み量を算出し、走査ぶれ量と測定ウェハ4の自重撓み量及び表面変位計測値とにより測定ウェハ4の表面形状値を算出する。
(もっと読む)
回転角検出装置
【課題】簡易な構成でありながらも、360°を超える範囲の回転角の検出にも適用可能な回転角検出装置を提供する。
【解決手段】ステアリングシャフトSにウォームホイール10を外嵌しておき、このウォームホイール10、ウォームギア11および案内ねじ軸12により、ステアリングシャフトSの回転に応じてウォームギア11を直動させる送りねじ機構を構成した。そして、ウォームギア11をその軸心方向から挟み込む態様で2つのカンチレバー13,14を設けた。また、これらカンチレバー13,14に歪みゲージ素子16,17をそれぞれ貼着した。
(もっと読む)
荷重変位算出装置および荷重変位算出方法
【課題】装置構成の小型化・簡素化を可能としつつ、高い信頼性を有する荷重から変形量を算出するための変換行列を生成可能な荷重変位算出装置を提供する。
【解決手段】荷重変位算出装置1に、対象物を第一の姿勢、第二の姿勢、第三の姿勢で支持する支持手段16・20と、対象物を互いに直交する三つの軸の軸線方向および該三つの軸のいずれか一つの軸の周方向に変形させる変形手段13・14・17・22と、対象物の互いに直交する三つの軸の軸線方向の変形量および該三つの軸のいずれか一つの軸の周方向の変形量を検出する変形量検出手段23・24・25・26と、対象物の互いに直交する三つの軸の軸線方向の荷重および周方向の荷重を検出する荷重検出手段19と、対象物の変形量に係る情報および荷重に係る情報に基づいて対象物の荷重から変形量を算出するための変換行列を生成する変換行列生成手段4aと、を具備した。
(もっと読む)
駆動軸損傷診断装置
【課題】 圧延設備等の駆動軸の損傷を診断するに際して、変位センサから出力された生波形から駆動軸のクロスの剥離および摩耗の両方ともの判別を可能とした駆動軸損傷診断装置を提供する。
【解決手段】 変位センサの出力から駆動軸の損傷状態を検出する処理手段は、変位センサの出力波形に対して移動平均によるスムージングを行うスムージング手段と、スムージングされた変位センサの出力波形をFFT変換するFFT変換手段と、FFT変換で得られたスペクトルから回転同期成分を除去して逆FFTにより時間軸波形に変換する逆FFT変換手段と、逆FFT変換で得られた波形の平均値から摩耗状態を判定する摩耗判定手段と、逆FFT変換で得られた波形の振幅から剥離状態を判定する剥離判定手段とを含んでいる。
(もっと読む)
多関節型座標測定装置
【課題】 多関節型測定アームに測定誤差要因となるストレスがかからない測
定姿勢を維持させる。
【解決手段】 測定アームの各関節の角度に基づき、1)測定アームの第1リ
ンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関
節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより
発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、
のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサか
らの空間座標値の出力を中止する。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】変位測定系を用いて基板テーブルの位置を高精度に測定する。
【解決手段】変位測定系1は、第1の方向における基板テーブル2の位置を測定するように構成された第1のxセンサ4と、第2の方向における基板テーブル2の位置を測定するように構成された第2のyセンサ6とを備える。変位測定系は、さらに第2のxセンサ5を備える。第1および第2のxセンサ4、5と第1および第2のyセンサ6、7は、少なくとも一つの格子プレート3に対するセンサそれぞれの位置を測定するように構成される。変位測定系1は、基板テーブル2の位置に応じて第1および第2のxセンサ4、5と第1および第2のyセンサ6、7を選択的に使用して、三自由度で基板テーブル2の位置を決定するように構成される。
(もっと読む)
乗員保護装置のためのロール角算出の方法および装置
本発明は乗員保護装置のためのロール角算出方法および関連する装置に関する。本発明によれば、車両の横加速度(ay)と垂直加速度(az)が検出され、検出された横加速度(ay)と検出された垂直加速度(az)に基づいて車両のロール角(α)が推定され、その際に、さらに車両速度(v)、ヨー角(ψ)および横滑り角(β)を含む他の走行動特性値が求められ、ロール角(α)の推定を改善するために、前記走行動特性値から向心加速度(v2/r)が計算される。  (もっと読む)
(もっと読む)
鋼板の伸び率測定装置および伸び率測定方法
【課題】圧延機の入側および出側に設置した圧延鋼板測長ロールによって圧延鋼板の伸び率を測定する際に、鋼板の波形状によって測長ロールが上下方向に位置変動した量を測定しても、従来よりも高精度に鋼板の伸びを測定する。
【解決手段】鋼板に所定の伸び率を付与する圧延機の入側および出側に、前記鋼板に接触しながら協動する入側測長ロール3および出側測長ロール4を設置し、前記入側測長ロールおよび出側測長ロールそれぞれの回転数を検出する入側ロール回転検出器5および出側ロール回転検出器6を設置し、前記入側測長ロールおよび出側測長ロールそれぞれの位置変位を検出する入側ロール位置検出器7および出側ロール位置検出器8を設置して、前記入側測長ロールおよび出側測長ロールそれぞれの位置変位の測定値、並びに入側および出側での鋼板の移動距離測定値を基にして所定の伸び率演算を行って、鋼板の伸びを測定する。
(もっと読む)
周長測定装置及び周長測定方法
【課題】 プーリの真円度誤差等に影響されることなく良好な周長の測定精度を得られるようにした周長測定装置及び周長測定方法を提供する。
【解決手段】 駆動側プーリ(14)と従動側プーリ(15)は、各々所定の回転角毎にマーキングされたn個の位相指標(A〜H)を有し、前記駆動側プーリ(14)のn個の位相指標(A〜H)と前記従動側プーリ(15)のn個の位相指標(A〜H)とのn2 通りの組み合わせの中から任意の組み合わせを選択し、その組み合わせを用いてリング状ワーク(20)の周長測定を行う。
前記任意の組み合わせは、リング状ワーク(20)の周回間、駆動側プーリ(14)と従動側プーリ(15)との間の対向距離の最大値と最小値の幅が最も少なくなる組み合わせである。
(もっと読む)
周長測定装置及び周長測定方法
【課題】 ローラ等に撓みが生じてもその撓みに影響されずに良好な測定精度を得られるようにした周長測定装置及び周長測定方法を提供する。
【解決手段】 周長測定装置(10)は、一方が駆動側となり他方が従動側となる一対のローラ(14、15)、前記駆動側ローラと従動側ローラとにリング状ワークを掛け渡した状態で前記駆動側ローラと従動側ローラとの間の対向距離を拡大して前記リング状ワークに所定の張力を付与する張力付与手段(27)、前記張力の付与方向への前記駆動側ローラの変位を検出する第1検出手段(18)、前記張力の付与方向への前記従動側ローラの変位を検出する第2検出手段(19)、前記第1及び第2検出手段の検出結果に基づいて前記リング状ワークの周長を演算する演算手段(22)を備える。
(もっと読む)
変位情報取得システム
【課題】対象物に異常が生じたことを確実に検出して、その異常の発生をいち早く報知することともに、一部の端末装置と本体装置との間で変位情報の送受信ができない状況が生じたときにも、他の端末装置から送信されるべき変位情報を本体装置に確実に送信できるようにする。
【解決手段】対象物Wの所定位置に配置されて、各所定位置における変位情報を取得する複数の端末装置B…と、本体装置Dとを無線通信回線網を介して接続されており、本体装置Dには、各端末装置Bから送信された変位情報に基づき、対象物Wの異常を判定する異常判定手段と、この異常判定手段により異常であると判定したときには、各端末装置B毎に異常を報知する異常報知手段とを設け、また、端末装置には、対象物Wの変位情報を取得する変位情報取得手段と、その変位情報を所定の時間間隔で本体装置に向けて送信する変位情報送信手段とを設けている。
(もっと読む)
回転精度測定方法
【課題】
3個の変位計間の相対角度が正確であるかどうかを評価することができ、回転軸の回転ムラを補正することができ、変位計の中心位置が回転軸上の同じ測定部位を指しているかどうかを評価することができ、ひいては3点法の特性を有効にかつ容易に活用して回転軸の回転精度を測定することができる回転精度測定方法を提供する
【解決手段】
それぞれの中心位置が回転する測定対象物の外周面上の同一回転軌跡上にあるように配置した3個の非接触型の変位計のプローブによって前記測定対象物の回転運動を測定し、前記測定対象物の回転精度成分と前記測定対象物の形状成分とを含む前記変位計の出力信号を処理して前記形状成分を分離して前記測定対象物の回転精度を測定する方法であって、前記処理の前に前記変位計の出力信号における前記回転の回転速度のムラを補正する
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメントを測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能なロ−ラフレ−ム32に設けた複数のロ−ラ33に車輪34を載置する。
前記車輪34のアライメントを測定するアライメント測定方法であること。
前記ロ−ラフレ−ム32を、被検車両のステアリング機構のヒステリシス位置情報を基に所定角度回動する。
ロ−ラフレ−ム32の前記回動位置でアライメントを測定する。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメント測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、簡単な構成によって測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能な複数のロ−ラ20に車輪21を載置する。
前記車輪20のアライメントを測定するホイ−ルアライメント測定方法であること。
前記車輪20に連係するステアリングホイ−ル28を、そのステアリング機構のヒステリシス位置情報を基に所定角度回動する。
前記ステアリングホイ−ル28の所定角度回動位置でアライメント測定する。
(もっと読む)
対象物測定装置
【課題】 測定対象物の光特性及び電気特性を用いて単一の検知手段(センサ)で測定対象物の特性及び位置を簡易で迅速且つ確実に測定できる対象物測定装置を提供する。
【解決手段】測定対象物100に対して可視光線を照射する光照射手段1と、この可視光線が照射された測定対象物100からの反射光を受光し、この受光光により二つの電極22a・22b、23a・23b間の光電半導体の抵抗値を変化させる二つのCdsセル22、23を間隔dで離隔配設し、このCdsセル22の外側の電極に交流電源25が接続されると共に、他のCdsセル23の外側の電極23aが出力端子26として形成される検知手段2と、この検知手段2の出力端子26からの検知信号に基づき前記測定対象物の距離及び材質を判別する測定対象物判別手段3とを備える構成とした。
(もっと読む)
41 - 60 / 104
[ Back to top ]