
Fターム[2F069MM04]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 保持、支持手段、取付構造 (473) | 検出器の (261)
Fターム[2F069MM04]に分類される特許
121 - 140 / 261
顕微鏡装置
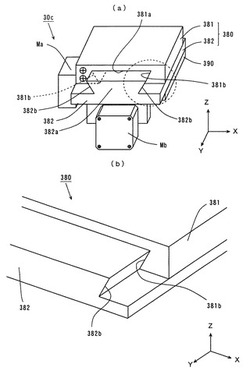
【課題】試料の振動を防止することができる走査型プローブ顕微鏡を備える顕微鏡装置を提供することである。
【解決手段】原子間力顕微鏡は、AFMスキャナおよび試料載置台を備える。試料載置台は、移動プレート、Z方向移動機構およびXY方向移動機構30cを含む。XY方向移動機構30cは、2つのモータMa,Mb、Y方向移動機構380およびX方向移動機構390を有する。Y方向移動機構380およびX方向移動機構390には、あり溝ガイド方式が用いられている。
(もっと読む)
車輪状態検出装置および車輪状態検出方法

【課題】ホイールの変位を検出し車輪状態を判別する。
【解決手段】車輪状態検出装置10は、車輪の一部を構成するホイール12の第1位置の径方向の変位を検出する第1変位センサ14と、ホイール12の第1位置より車輪の回転軸方向外側に位置するホイール12の第2位置の径方向の変位を検出する第2変位センサと16、第1変位センサ14が検出した変位に基づく第1出力値と、第2変位センサ16が検出した変位に基づく第2出力値とを用いて車輪状態を判別する制御部24と、を備える。
(もっと読む)
走査型プローブ顕微鏡
【課題】
探針アプローチ時間を短縮してインライン装置としてのスループットを向上させた原子間力顕微鏡等の走査型プローブ顕微鏡を提供することにある。
【解決手段】
本発明は、試料の表面の形状を計測する走査型プローブ顕微鏡であって、試料の表面の高さを探針計測位置から距離L離れた高さ計測位置において計測する高さセンサ116と、高さ計測位置Cでの試料の表面の高さ情報hCを前記高さセンサ116で計測した結果を用いて試料ステージ104を上昇させて、前記高さ計測位置での試料の表面の高さと探針計測位置での試料の表面の高さとの間の高さずれ情報ΔZ又は段差情報(RhC−RhA)に基づき前記探針計測位置における試料の表面と前記探針の先端との間の間隔が所望の範囲(hg)になるように前記試料の表面を前記探針の先端に接近させる制御手段とを備えたことを特徴とする。
(もっと読む)
プレス金型の動的変形測定法及び動的変形測定システム
【課題】プレス加工に係る上型と下型の動的変形を絶対的に捉え、プレス成型品に成型不良が発生した場合の金型の修正に迅速に対応できるようにする。
【解決手段】上型7および下型8に複数の測定ポイントを設定して、その各測定ポイントに加速度センサSa,Sbを配置し、上型7と下型8の両者にプレス荷重を作用させたときの加速度センサSa,Sbの出力(加速度信号)を数値解析装置10に入力する。数値解析装置10では、加速度信号を補正回路15Aに通して加速度センサSa,Saの出力電圧変動による誤差を補正した後、その加速度信号を積分回路15Bにより積分して速度信号を生成する。又、積分回路15Bの出力を補正回路15Cに通して数値解析上の誤差を補正した後、その速度信号を積分回路15Dにより積分して変位信号を生成する。そして、その変位信号を数値化あるいはグラフ化して表示装置20に表示する。
(もっと読む)
加振型カンチレバーホルダ及び走査型プローブ顕微鏡
【課題】 余分な振動をカット(相殺)して、カンチレバーのみの振動特性で該カンチレバーを振動させること。
【解決手段】 試料に対向配置され、先端に探針3aを有すると共に基端側が本体部3bに片持ち状態に支持されたカンチレバー3を固定するものであって、カンチレバーを試料に対して所定角度傾けた状態で本体部を載置して固定する載置台10と、該載置台に固定され、所定の波形信号に応じた位相及び振幅で振動する第1の加振源11と、該第1の加振源が固定されたホルダ本体12と、該ホルダ本体の少なくとも1箇所に固定され、第1の加振源から載置台及びホルダ本体に伝わった振動を、相殺させる振動を発生させる第2の加振源13とを備えている加振型カンチレバーホルダ2を提供する。
(もっと読む)
車高センサ
【課題】車高を検出するためのアームなどに検出対象である回転方向以外の変位がある場合においても、検出精度の低下を抑制する車高センサを提供する。
【解決手段】車高センサ20において、支持軸38は、ロアアームが揺動する中心軸と同軸に車体本体10に取り付けられる。ブッシュ内筒32は、円筒状に形成され、支持軸38に挿着することにより支持軸38に回転可能に支持される。揺動アーム24は、ブッシュ30を介してブッシュ内筒32と一体的に連結され、ロアアームと共に揺動すうように設けられる。回転センサ26は、ブッシュ内筒32の回転を検出することにより、ブッシュ30を介して揺動アーム24の回転を検出する。
(もっと読む)
駆動軸損傷診断装置
【課題】 圧延設備等の駆動軸の損傷を診断するに際して、変位センサから出力された生波形から駆動軸のクロスの剥離および摩耗の両方ともの判別を可能とした駆動軸損傷診断装置を提供する。
【解決手段】 変位センサの出力から駆動軸の損傷状態を検出する処理手段は、変位センサの出力波形に対して移動平均によるスムージングを行うスムージング手段と、スムージングされた変位センサの出力波形をFFT変換するFFT変換手段と、FFT変換で得られたスペクトルから回転同期成分を除去して逆FFTにより時間軸波形に変換する逆FFT変換手段と、逆FFT変換で得られた波形の平均値から摩耗状態を判定する摩耗判定手段と、逆FFT変換で得られた波形の振幅から剥離状態を判定する剥離判定手段とを含んでいる。
(もっと読む)
厚み測定装置及び厚み測定方法
【課題】簡易な構成で、精度良く膜厚測定可能な厚み測定装置または厚み測定方法を提供する。
【解決手段】基準部材16の上に載置された測定対象部材18上に載置されるように挿入された厚みの異なる複数の標準部材14A、14B各々の表面から基準部材16表面までの距離の測定結果に基づいた該距離の差分と、該厚み測定装置10において予め特定環境条件下において測定された複数の標準部材14A、14B各々の表面から基準部材16表面までの距離の差分と、の比較結果に基づいて、膜厚センサ12によって測定した膜厚測定結果を補正する。
(もっと読む)
非接触式膜厚計
【課題】塗膜の膜厚やその乾燥/湿潤状態に関わらず、塗膜の厚さを簡便にかつ高精度に計測する。
【解決手段】非接触式膜厚計10において、本体11の底面13に渦流変位計のための中空管状のプローブ12を取り付ける。プローブ12の先端にコイル14を設ける。底面13において、中空管状のプローブ12の内側にレーザ変位計のレーザ照射部15とレーザ受光部16とを設ける。コイル14により交流磁界を生成し、金属板Sに渦電流を誘導する。誘導された渦電流によるコイル14のインダクタンス変化を検出し、プローブ12と金属板Sまでの距離L2を算出する。一方、レーザ照射部15からレーザ光線を照射し、塗膜Fの表面で反射されたレーザ光線をレーザ受光部16において検出する。三角測距の原理に基づいて、レーザ変位計と塗膜表面との間の距離L1を算出する。距離L1、L2に基づいて塗膜Fの厚さδを算出する。
(もっと読む)
プローブ観察装置、表面性状測定装置
【課題】簡便な操作でプローブを高精度に観察できるプローブ観察装置を提供する。
【解決手段】プローブ210を撮像するカメラ230と、カメラ230にて取得した画像データを画像処理する画像処理部と、画像処理部にて画像処理された画像データを表示するモニタ400と、手動操作にて画像処理内容を入力指令するマウス500とを備える。画像処理部は、マウスにて入力される指令に応じて画像データを加工処理する画像データ加工処理部を備える。カメラ230は、低倍率のレンズ系を有し、プローブ210を視野内に入れた状態でプローブ210に対する相対位置が固定された状態で設けられている。
(もっと読む)
ワークに工具を位置決めするための表示装置
本発明は、ワーク(4)に工具を位置決めするための表示装置であって、ワーク(4)を貫通する信号(10)を送信するための送信器(2)と、該信号(10)を受信するための受信器とが設けられている形式のものに関する。本発明によれば、受信器が、複数のセンサエレメント(8)から成るアッセンブリを有していることが提案される。  (もっと読む)
(もっと読む)
水圧鉄管の厚み測定装置及びその厚み測定方法
【課題】長さが長い水圧鉄管の厚み測定に適しており、その厚み測定を経済的かつ安全に行うことが可能な水圧鉄管の厚み測定装置及びその厚み測定方法を提供する。
【解決手段】水圧鉄管11の内面12に吸着する複数の車輪13及び走行距離計18を備えた台車14と、水圧鉄管11の塗膜厚み及び総厚みの測定に使用する各センサー22、23を備える計装部19とを有し、計装部19は台車14と分離可能になって、計装部19には更に、台車14の前方、後方、及び各センサー22、23を撮像するカメラ27、28、32と、水圧鉄管11の清掃手段21と、台車14の傾きを検知する角度センサーと、計装部19の送電及び信号通信を行うケーブル31と、その巻取手段42が設けられている。その測定方法は、上流側から下流側へかけて下方へ傾斜又は垂直に配置された水圧鉄管11の上流側に厚み測定装置10を配置した後、下流側へ向けて走行させる。
(もっと読む)
操舵角検出装置
【課題】 フォークリフト等の荷役車両に適用されて操舵輪の操舵角を検出する際に用いられ、とりわけ芯ずれ吸収機能を有する操舵角検出装置に於て、製作が容易でコストの低減を図る事ができると共に、芯ずれを効果的に吸収でき、然も交換等が容易に行える様にする。
【解決手段】 支持部材2と、これに回転可能に設けられたキングピン3と、これに対向して支持部材2に取付けられた回転センサ4と、これの入力軸14に形成された係合部5と、キングピン3に着脱可能に取付けられて係合部5を両側から弾性挾持し得る板バネ挾持体6とで構成し、とりわけキングピン3に対して板バネ挾持体6を着脱可能に取付ける。
(もっと読む)
検出器支持装置
【課題】種々のワークに対して検出器の検出方向を簡単に切換えでき、円筒外周面、内周面及び平面の測定を容易に行うことのできる検出器支持装置を提供すること。
【解決手段】保持台21と、第1のアーム11と、第2のアーム12と、検出器31を取り付ける第3のアーム13とを、第1の支持部14、第2の支持部15、第3の支持部16とで連結し、第1の支持部14、第2の支持部15、及び第3の支持部16のうち少なくともいずれか2箇所の支持部が支持する相手を相対的に回転可能に支持するようにした。
(もっと読む)
接触式プローブ
【課題】 接触式プローブによる形状測定において、測定物表面にゴミなどがあっても安定して走査可能なプローブを提供する。
【解決手段】 ハウジングに固定してプローブシャフトに力を加える事が可能な力発生手段を設け、ハウジングとプローブシャフトの間の変位や速度によってプローブシャフトに作用させる力を変化させる事で安定した走査を可能にする。すなわち、正常にトレースが行われている時は、弱いばね要素としての力をプローブシャフトに作用させ、ごみ等により跳ね上げられた時は、ばね要素の剛性を強める事で素早くプローブを測定面に戻すようにする。
(もっと読む)
三次元測定装置
【課題】 測定者の使い勝手を向上させると共に、再現性の高い測定を可能にする。
【解決手段】 被測定物200を測定するための測定プローブ101と、この測定プローブ101を三次元測定空間内で外部からの力に対して移動自在に支持すると共に前記測定プローブの位置を検出するための位置情報S1を出力する測定アーム100と、位置情報S1に基づいて測定プローブ101の三次元測定空間内の位置を検出するとともに、測定プローブ101の三次元測定空間内における移動を任意の線上又は面上に制限するように測定アーム100を制御する制御部300とを備える。
(もっと読む)
集砂設備及び集砂方法
【課題】使用水量の低減が可能であって堆積物を集砂ピットにより効率的に収集できる集砂設備及び集砂方法を提供する。
【解決手段】集砂設備20による集砂方法は、沈砂槽10の底部11に配設された噴射ノズル31,41,51から噴射する圧力水によって底部11に堆積した堆積物gを集砂ピット12に収集する集砂方法である。この集砂方法は、噴射ノズル31,41,51と集砂ピット12との間の堆積物gの厚さを計測手段110Aによって計測する計測工程と、堆積物gの厚さに応じて噴射ノズル31,41,51からの圧力水の噴射を制御して集砂ピット12に堆積物gを収集する集砂工程と、を備える。
(もっと読む)
キャップ付ボトル缶の測定方法及び測定装置
【課題】 測定対象を同一基準の下でより短時間で測定することができるキャップ付ボトル缶の測定方法及び測定装置を提供すること。
【解決手段】 金属製のボトル缶にキャップが被着、ネジ成形され、キャップが天面部の周縁に形成された段差部とキャップネジ部とを有するキャップ付ボトル缶2の測定方法において、缶軸Oと交差する平面内で、キャップネジ部の輪郭線を取得することで、キャップネジ部のネジ深さを測定し、段差部に脚部52の下端部内面を接触させると共に天面部に測定子53を接触させることで、段差部の天面部に対する深さを測定する。
(もっと読む)
蒸気タービンの内部構成部品の位置調整方法とこの方法で用いられる計測装置
【課題】上半部ケーシングを取外した状態でもケーシング内部構造物の位置調整を高精度に簡単且つ容易にできるようにすることにある。
【解決手段】上半部ケーシング2と下半部ケーシング1にてケーシングが構成される蒸気タービンの内部構成部品を位置合せするための方法であって、ケーシング外部を支持点としてダミーロータ4をケーシング内に貫通させ、上半部ケーシング2が取外された下半部ケーシング1の状態から上半部ケーシング2を組立てた状態にしたときのダミーロータ4に対する内部構成部品との上下、左右方向の変位量を計測し、その計測値に基づいて上半部ケーシング2が取外された状態で内部構成部品の支持点高さをオフセット調整することにより、上半部ケーシング2を組立状態にて内部構成部品を所定の位置に合せることを可能にする。
(もっと読む)
石材定盤を備える装置及び座標測定機
【課題】 石材定盤を備え、かつ石材定盤の少なくとも一面を可動部材のガイド面として使用する装置において、周囲温度の変化に伴って定盤のガイド面の真直度低下を防止する。
【解決手段】 石材定盤24を備える座標測定機1において、可動部材12A、12Bのガイド面として使用される側面24A、24Bと直交する異なる側面24C、24Dに、これらをそれぞれ覆う断熱部材60A、60Bを設ける。
(もっと読む)
121 - 140 / 261
[ Back to top ]