
Fターム[2F069MM04]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 保持、支持手段、取付構造 (473) | 検出器の (261)
Fターム[2F069MM04]に分類される特許
101 - 120 / 261
少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置
本発明は、少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置に関し、各スライド方向に対応して、当該の空間方向に沿った物体の位置を測定するための測長器が配備されており、当該の測長器(2,3)の第一の構成部品として、測定すべき物体(10)のスライド方向(x,y)に沿って延びる少なくとも一つの基準尺(20,30)が配備され、当該の測長器(2,3)の第二の構成要素として、基準尺(20,30)を走査するための走査ヘッド(25,35)が配備されており、その結果測定すべき物体(10)の当該のスライド方向(x,y)に沿った走査ヘッド(25,35)に対する基準尺(20,30)の位置の変化を検出することが可能であり、当該の測長器(2,3)の二つの構成要素(20,25;30,35)の中の一方が、測定すべき物体(10)が動いた場合に、その物体と一緒に当該のスライド方向(x,y)に沿って動かされ、当該の測長器(2,3)の測定方向(x,y)に沿った測定すべき物体(10)と一緒に移動可能な当該の測長器(2,3)の構成部品(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が配備されている。本発明では、測定すべき物体(10)と一緒に移動可能な当該の測長器(2,3)の構成部品(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が、第一の構造グループとしての測定目盛(12,13)と、それに対応する第二の構造グループとしての測定ヘッド(23,33)とを備えており、二つの構造グループ(12,23;13,33)の中の一方が、測定すべき物体(10)に配備されており、二つの構造グループ(12,23;13,33)の中の他方が、測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成部品(20,30)に配備されている。 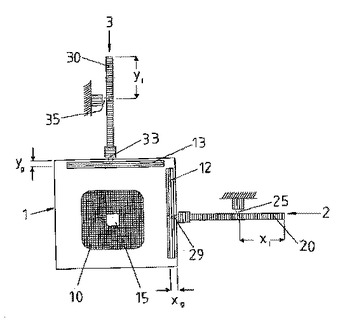 (もっと読む)
(もっと読む)
真直度測定装置、方法、及び塗布方法
【課題】バー塗布装置等に使用される円柱状部材の真直度を精度よく測定するのに好適な真直度測定装置、方法、及び該真直度測定装置で測定した円柱状部材を使用した塗布方法を提供する。
【解決手段】バーBの上端部を把持しながら糸状部材14により吊り下げ、バーの上端部近傍をバーの外径と略等しい内径の支持孔を備える第1の支持部材24により支持するとともに、バーの下端部近傍をバーの外径と略等しい内径の支持孔を備える第2の支持部材26により支持し、バーを回転駆動させるとともに、変位センサ20をバーに沿って移動させながらバーの振れを非接触で検出する。
(もっと読む)
2つのハウジング貫通ボアのボア壁の磨耗状態を検知するための測定装置

【課題】2つのハウジング貫通ボアのボア壁の磨耗状態を検知するための測定装置を提供する。
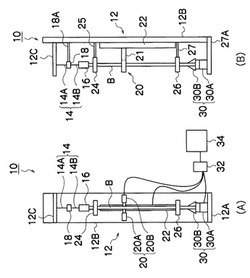
【解決手段】少なくとも2軸のスクリュー押出機の、互いに平行なボア軸線を有する2つのハウジング貫通ボアのボア壁の磨耗状態を検知するための測定装置は、後部駆動輪(8)と、前部案内輪(12)と、各々がボア軸線を中心として旋回式に駆動可能であるとともにそれぞれのボア壁から所定の距離を置いて位置決め可能である非接触式に動作する距離センサ(21、21’)とを備えた架台を有する。
(もっと読む)
プローブホルダ及び走査型プローブ顕微鏡
【課題】作業者の手を煩わすことなく簡単且つ短時間でプローブの交換を行うことができ、小型の走査型プローブ顕微鏡にも適用可能であること。
【解決手段】試料Sに対向配置され、レバー部2aの先端に探針2bを有すると共に該レバー部の基端側が本体部2cに片持ち状態に支持されたプローブ2を複数固定するものであって、試料表面S1に対向する対向面10aを有し、該対向面に複数のプローブを、本体部を介してそれぞれ着脱自在に固定する固定板10と、該固定板を移動可能に支持するホルダ本体11と、固定板を移動させると共に複数のプローブのうち選択したいずれかのプローブを観察ポジションPに位置させる可動手段12とを備えているプローブホルダ3を提供する。
(もっと読む)
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法
【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
車高検知装置
【課題】車両への設置を容易にする。
【解決手段】車輪側発信部10は、車両50においてバネ下となる車輪51の側に配置され、所定の発信タイミングで定期的に波動信号を発信する。車体側受信部11は、車両においてバネ上となる車体52の側に配置され、車輪側発信部10から発信された波動信号を受信する。車体側受信部11では、波動信号が車輪側発信部10から発信されてから車体側受信部11にて受信されるまでの発受信時間や、車体側受信部11における波動信号の受信強度に基づき、車両50における車高を検知する処理を実行する。
(もっと読む)
舵角検出装置
【課題】全舵角範囲に亘る回転軸の回転角度を精度良く検出し、車両の舵角を簡素な構成にて精度良く検出可能な舵角検出装置を提供する。
【解決手段】ステアリングホイール30の操作に応じたステアリング軸3の回転を操舵用の車輪12,12に伝え、該車輪12,12の向きを変えて舵取りされる車両の操舵角度を、ステアリング軸3の複数回転に亘る回転角度を求めることにより検出する舵角検出装置において、ステアリング軸3に係合され、ステアリング軸3の回転に応じて移動する移動体6の移動位置を位置センサ7により検出し、この検出結果によりステアリング軸3が中立位置から左右の何回転目の領域にあるかを判定する。回転角センサにより判定された領域内でのステアリング軸3の回転角度を求めて全舵角範囲内での操舵角度を算出する。以上により簡素な構成により全舵角範囲に亘って高精度の舵角検出が可能となる。
(もっと読む)
担持体にスケールを保持するための方法ならびに担持体とスケールを備えた組立体
本発明によれば、測定目盛(15)を備えているスケール(1)は、静電クランプにより担持体(2)に確実かつ取外し可能に保持される。  (もっと読む)
(もっと読む)
管状体の振れ測定方法及びその装置
【課題】回転する管状体の振れをより正確かつ迅速に測定できる測定方法とその装置を提供すること。
【解決手段】回転可能な管端チャックへ管状体の内側面を押圧する状態で当該管状体の一端部を保持させ、管端チャックにより前記管状体を回転させながら、管状体の他端部内の計測位置から管状体の内周までの距離を計測して回転角度毎の計測値を得るとともに、管状体の外周から離れた測定位置から管状体の外周までの距離を測定して回転角度毎の測定値を得、前記計測値に演算処理を施すことにより管状体の他端部の内径中心を算出して当該管状体の仮想中心軸を求め、前記測定位置において管端チャックの回転軸線と直交する面における前記回転軸線に対する前記仮想中心軸の偏倚量により前記測定値を補正する手段を含む。
(もっと読む)
絶対角度検出装置
【課題】高分解能にして組立が容易な絶対角度検出装置を提供する。
【解決手段】ステータ部材1と、ステータ部材1に回転可能に支承されているロータ部材2と、ロータ部材2に一体的に取り付けられたコード板3と、コード板3に形成された信号検出用のコードパターン列3aと、ステータ部材1内に備えられたプリント基板5と、プリント基板5に実装された複数個の検出素子6とを有し、当該検出素子6がコードパターン列3aの配列方向に沿って所定の間隔で配置された絶対角度検出装置において、リード貫通孔5aが開設されたプリント基板5と当該プリント基板5上に実装される複数個の検出素子6の本体部6aとの間に、位置決め孔11が開設されたシート状の位置規制部材10を介設する。
(もっと読む)
車両のシートスライド装置
【課題】位置検出手段による検出部がレールの外部にあると、誤検出を生じる場合がある。
【解決手段】上部が開口する略コ字形状に屈曲形成され車両のフロアに固定されたロアレール1の前記開口部に、下部が開口する略コ字形状に屈曲形成されシートに固定されたアッパレール2がスライド自在に嵌挿され、ロアレール1のロックプレート10に対してアッパレール2を固定するロック機構6が設けられ、アッパレール2の位置を検出する近接センサ30がアッパレール2に設けられる一方、ロックプレート10には近接センサ30により検出される被検出面10dが設けられている。そして、近接センサ30の反検出面側を当接させることにより検出面30bと被検出面10dとの検出距離aを必然的に設定させる距離設定部10cがロックプレート10に一体成形されている。
(もっと読む)
3次元形状測定システムおよび3次元形状測定方法
【課題】簡単かつ小型な構成で測定対象物の3次元形状を測定することが可能な3次元形状測定システムを提供する。
【解決手段】3次元形状測定システムは、引き出されるワイヤ21A,21B,21Cの引出し量Lおよび同ワイヤ21A,21B,21Cの引き出される方向を表す回転角θx,θzをそれぞれ検出可能なワイヤ装置20A,20B,20Cを備える。各ワイヤ21A,21B,21Cの各先端部21aA,21aB,21aCは、3次元形状測定装置10の背面に接続されている。3次元画像データ処理装置43は、3次元形状測定装置10による測定時におけるワイヤ21A,21B,21Cの引出し量Lおよび回転角θx,θzを用いて座標変換関数FPSを計算する。そして、各測定位置ごとに生成される3次元形状データを予め記憶している座標変換関数FCPと計算した座標変換関数FPSとを用いて座標変換する。
(もっと読む)
プローブ顕微鏡およびプローブ顕微鏡の測定方法
【課題】 探針と試料を測定領域に位置決めする際の探針破損を低減させ、探針先端形状に起因する分解能の変化を抑えて、適切でしかも安定な測定ができるプローブ顕微鏡を提供すること。
【解決手段】 先端に粗動用探針21を有した粗動用カンチレバー23と、先端に測定用探針22を有した測定用カンチレバー24を構成したプローブ顕微鏡において、粗動用探針22で試料測定領域に位置決めされた後に、粗動用探針21と測定用探針22の試料表面との距離を変更するカンチレバー変換手段で、一旦、粗動用探針21を試料表面測定領域から離し、測定用探針22に切り替えた後に、測定用探針22を試料測定領域に位置決めして測定するようにした。
(もっと読む)
回転軸の回転角度検出装置
【課題】熱の影響、及び検出器やその取付部分と被検出部との線膨張係数の違いに起因する検出器と被検出部との間隔の変化を抑制すること。
【解決手段】この回転軸の回転角度検出装置100は、センサプレート5と、ポジションセンサ10と、第1及び第2潤滑油噴射ノズル9a、9bとを含む。センサプレート5はクランク軸4に取り付けられており、外周部に複数の歯5Gが設けられている。ポジションセンサ10は、磁気センサであり、センサプレート5の外周部に形成される歯5Gの数を非接触で計数する。第1潤滑油噴射ノズル9aからは、ポジションセンサ10やその取付部分に向かって潤滑油Lが噴射され、また、第2潤滑油噴射ノズル9bからは、センサプレート5に向かって潤滑油Lが噴射される。
(もっと読む)
原子間力顕微鏡
【課題】計測光を反射するプローブに光学系の焦点を追従させることで測定精度を向上させる。
【解決手段】プローブ22の反射面で計測光を反射させ、プローブ22と被測定物1の間に作用する原子間力を利用して被測定物1の表面形状を測定する。プローブ22を駆動する第1のスキャナ10とは別に、光学系の焦点位置を移動させる第2のスキャナ26を設けて、第1、第2のスキャナ10、26の制御量の相関を表わす位置変換データをあらかじめ求めておく。第1、第2のスキャナ10、26を同期的に制御することで、プローブ22に光学系の焦点を追従させる。
(もっと読む)
操向角センサを備えた電動式操向装置
【課題】操向軸の回転方向を感知する方向センサ及びモータ軸の回転角を感知するモータ位置センサを用いて絶対操向角を感知することが可能な電動式操向装置を提供して,操向装置の製作費用を縮小すること。
【解決手段】本発明は,自動車の操向ホイールに連結される操向軸102と,操向軸と連動して回転する減速軸601と,発信部603及び受信部605を含む方向センサ607と,減速軸601に設けられ,発信部603と受信部605との間に配設される回転部材609と,モータ軸611を介して操向軸102に操向補助動力を供給するモータ130と,モータ130のモータ軸611の回転角を感知するモータ位置センサ613と,方向センサ607及びモータ位置センサ613から各々発信される電気的信号を受信し,操向角を算出する電子制御装置123と,を含むことを特徴とする電動式操向装置を提供する。
(もっと読む)
座標測定機械及び座標測定機械を操作するための方法
本発明は、座標測定機械を操作するための方法及び座標測定機械に関し、この場合、少なくとも1つの電気モータMによって駆動される座標測定機械の座標測定装置、特に測定ヘッドは、少なくとも1つの方向に動くことが可能である。電気モータMの運動、このようにして、座標測定装置の運動を行うために、電気モータMを通して(ラインC11、C21の電流回路を介して)流れる駆動電流が測定される。電気モータMの運動又は座標測定装置5の運動が進行すべき目標速度に基づいて及び/又は目標加速度に基づいて、駆動電流について限界値が検出される(コンピュータPC及び/又はマイクロコントローラMCで)。駆動電流が検出された限界値IΤに達した場合及び/又は駆動電流が検出された限界値IΤを超えた場合、例えば、コンピュータPC又はマイクロコントローラMCが、電流回路に配置されたスイッチSW1、SW2の一方をオフにすることによって、座標測定装置5は所定の状態に設定される。  (もっと読む)
(もっと読む)
ユーザの姿勢をモニタするための装置
【課題】
ユーザの姿勢をモニタ及び追跡し、ユーザの姿勢における欠陥を矯正するためにフィードバックを行う装置を提供する。
【解決手段】
本発明の装置はユーザによる着用が可能な装置であって、各々がユーザの身体の少なくとも一部分の位置に関する指標を提供するための複数のセンサ素子と、合成位置信号を提供するために、その複数のセンサ素子の各々によって提供される位置に関する各指標を受信するための受信機とを含む。個々のセンサの読取り結果が、すべて、更なる分析のために外部エンティティに送られる。センサは、ユーザの身体の少なくとも一部分の曲りを測定するために種々のロケーション又は位置に設置される。
(もっと読む)
顕微鏡装置
【課題】振動の発生を防止することができる走査型プローブ顕微鏡を備える顕微鏡装置を提供することである。
【解決手段】原子間力顕微鏡10および光学顕微鏡20は、顕微鏡連結部材40に取り付けられる。顕微鏡連結部材40は、弾性部材54a,54b,54c,54dを介してベース筐体部50により保持される。顕微鏡連結部材40に、おもりWが取り付けられる。おもりWの取り付け位置は、顕微鏡装置の各構成要素の重量、設置位置等を考慮して、各構成要素に発生する振動を確実に減衰できるように設定されている。
(もっと読む)
極低測定圧接触式測長装置
【課題】測定位置にかかわりなく一定圧の安定した微小接触圧を創成でき、それにより、傾斜部分でも誤差の少ない正確な精密測定を実現することができ、しかも構造が簡単で安価に実施できる極低測定圧接触式測長装置を提供する。
【解決手段】被測定物に測定端子を接触させて測長する形式の測定装置において、測定端子を並進させるための駆動シリンダを有し、かつ、前記駆動シリンダが、微小圧力創成用のために内部に吹き込まれる駆動用気体の一部を流出させる気体流出機構を備えている。
(もっと読む)
101 - 120 / 261
[ Back to top ]