
Fターム[2F069MM23]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 載置台 (170)
Fターム[2F069MM23]の下位に属するFターム
X−Yテーブル (48)
Fターム[2F069MM23]に分類される特許
61 - 80 / 122
光学素子測定用治具、並びに、光学素子の面形状測定装置及び方法
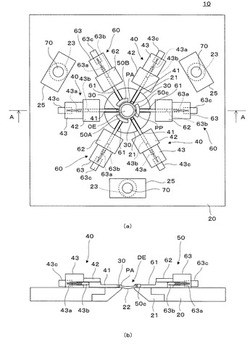
【課題】 光学素子を確実に固定することによって高精度の形状測定を可能にし、好ましくは、光学素子を表裏の両面から計測することができる光学素子測定用治具を提供すること。
【解決手段】 この光学素子測定用治具10において、3つの球面部30と、3つの当接部材50A,50B,50Cとは、光学素子OEの外縁部PAに沿って等間隔で互い違いに配置されている。この結果、球面部30と当接部材50A,50B,50Cとの干渉を防止しつつ両者を効率的に配置でき、基板20上に光学素子OEを安定した状態で固定することができる。つまり、球面部30や光学素子OEの光学面の計測を確実に行うことができ、その作業性を高めることができる。
(もっと読む)
走査型プローブ顕微鏡装置

【課題】 退避位置から適切な位置まで検査対象物及び探針を互いに接近させる際の操作性を向上させた走査型プローブ顕微鏡装置を提供する。
【解決手段】 検査対象物が載置される載置台11と、カンチレバーに取り付けられた探針を載置台11上の検査対象物へ押圧しながら走査させ、検査対象物の表面形状を示す形状データを生成するプローブ顕微鏡5と、検査対象物を撮影し、カンチレバーの後方から見た顕微鏡画像を生成する光学顕微鏡13とからなる走査型プローブ顕微鏡装置であって、載置台11及びカンチレバーを相対的に移動させ、検査対象物及び探針を互いに接近させるアプローチ制御部112と、検査対象物及びカンチレバーを撮影し、カンチレバーの側方から見たサイドビュー画像を生成するサイドビューカメラ制御部140と、顕微鏡画像及びサイドビュー画像を画像処理し、モニター31上に表示する画像処理部30により構成される。
(もっと読む)
顕微鏡システム、観察方法および観察プログラム
【課題】広範囲に渡る試料の観察を容易に行うことができるとともに、迅速かつ正確な観察を行うことが可能な顕微鏡システム、観察方法および観察プログラムを提供する。
【解決手段】試料上の走査単位領域および観察対象領域を設定する。CPUは観察対象領域内の走査単位領域の個数および位置を設定し、各走査単位領域の形状情報を取得する(ステップS21)。CPUは、取得した形状情報に基づいて全ての走査単位領域の上面視画像を表示装置に表示させる(ステップS22)。複数の走査単位領域の上面視画像を使用者が手動で連結する場合、CPUは選択された上面視画像に対するオフセット処理を行う(ステップS27)。オフセット処理は、隣接する走査単位領域の上面視画像の重複領域の画像のピクセルの階調がほぼ等しくなるように一方の上面視画像のピクセルの階調をオフセットすることにより行われる。
(もっと読む)
測定装置および光学素子の評価方法
【課題】光学素子の光学面と円筒基準形状の相対位置を高精度で評価する。
【解決手段】3つの球4を有する測定用の治具2に、非球面レンズ1のレンズ第1面7およびレンズ第2面8の外周部に形成された円筒基準形状9を三次元形状測定用のプローブによって測定するための基準形状測定空間3を設ける。まず、非球面レンズ1のレンズ第1面7およびレンズ第2面8の表面形状を測定し、治具2の3つの球4を基準とした座標の点列データを得る。次いで、非球面レンズ1の円筒基準形状9を測定し、3つの球4を基準とした座標の点群データを得て、円筒基準形状9とレンズ第1面7およびレンズ第2面8の相対位置を求める。
(もっと読む)
荷重変位算出装置および荷重変位算出方法
【課題】装置構成の小型化・簡素化を可能としつつ、高い信頼性を有する荷重から変形量を算出するための変換行列を生成可能な荷重変位算出装置を提供する。
【解決手段】荷重変位算出装置1に、対象物を第一の姿勢、第二の姿勢、第三の姿勢で支持する支持手段16・20と、対象物を互いに直交する三つの軸の軸線方向および該三つの軸のいずれか一つの軸の周方向に変形させる変形手段13・14・17・22と、対象物の互いに直交する三つの軸の軸線方向の変形量および該三つの軸のいずれか一つの軸の周方向の変形量を検出する変形量検出手段23・24・25・26と、対象物の互いに直交する三つの軸の軸線方向の荷重および周方向の荷重を検出する荷重検出手段19と、対象物の変形量に係る情報および荷重に係る情報に基づいて対象物の荷重から変形量を算出するための変換行列を生成する変換行列生成手段4aと、を具備した。
(もっと読む)
測定対象物についての測定可能な変数を決定する装置
【課題】位置決めおよび測定精度に及ぼす工作物の重量の影響を低減する単純かつコスト効率の高い代案を提供する。
【解決手段】測定対象物30についての測定可能な変数を決定する装置は、複数の機械脚部38、42上に取り付けられた底板12を有している。測定ヘッド28は、底板に対して移動させることができる。工作物テーブル46は、測定対象物30を支持するために底板12上に設置することができる。本発明の一局面によれば、底板12は、垂直方向に調節することができるように機械脚部38、42に取り付けられている。機械脚部38、42は、工作物テーブル46を保持するために第1の調節位置で底板12から上方に突出している。第2の調節位置においては、機械脚部38、42は、底板12内に後退されている。
(もっと読む)
櫛歯型プローブ、これを備える原子間力顕微鏡装置および変位測定方法
【課題】 製品ばらつきが小さく、製品歩留まりが高い櫛歯型プローブを提供すること。
【解決手段】 櫛歯型プローブ10は、静止部1、可動部2、探針3および支持部4を備えている。櫛歯ドライブ10aは、静止部1の櫛歯状凹凸部と可動部2の櫛歯状凹凸部とが非接触で噛合し、交流電源7によって与えられる静電力により可動部2がZ方向に振動する。櫛歯型プローブ10は、可動部2を励振するのに圧電体層のような機能性薄膜を用いないので、製品歩留まりが高い。可動部2が外力(探針3−試料S間の原子間力)の影響を受けると、櫛歯ドライブ10aのアドミッタンスが変化する。アドミッタンス検出器20によりアドミッタンスを検出し、この検出値から可動部2の変位量を求める。
(もっと読む)
三次元位置測定装置、波面収差測定装置および三次元形状測定装置
【課題】測長干渉計の測定基準となる基準ミラーを保持する構造体に、ベースの変形や振動が伝播するのを防ぐ。
【解決手段】三次元形状測定のためのプローブ等を保持する移動ステージ7の三次元位置を測長干渉計1〜6によって計測する。測長干渉計1〜6に対向するX、Y、Z方向の基準ミラー8、9、10は、一本の根幹支柱14から三股に分岐する片持ち梁11、12、13の先端に支持される。この構造体(11、12、13、14)は、根幹支柱14とベース15の接触面積が小さいため、ベース15の変形や振動が基準ミラー8、9、10に伝播するのを防ぐことができる。
(もっと読む)
クリップ付Vブロック
【課題】 従来、検査測定機に於いての検査時、測定部品を固定するのに不安定な状態であったのを簡単に正確に固定する。
【解決手段】 Vブロックにクリップをつけワンタッチで挟み、測定部品をすばやく正確に固定する。
(もっと読む)
基板の両面形状測定システム
【課題】 大型・重量化した基板の表面および裏面の両面形状を、作業性に優れ簡便にしかも高精度に測定できる基板の両面形状測定システムを提供する。
【解決手段】 基板の両面形状測定システムは、主要な構成装置として、基板形状測定装置1、基板ハンドリング・ロボット2およびコンピュータ3を備える。基板形状測定装置1は、垂直状態に配置した縦型定盤4と、それに平行に被測定基板Pを保持する基板保持機構5と、変位計走査コラム6とを有し、被測定基板Pの両面形状を同時に測定する。基板ハンドリング・ロボット2は、未測定の被測定基板Pを垂直状態にして上記基板保持機構5に装着し、あるいは測定済みの被測定基板Pを基板保持機構5から取り外す。ここで、基板形状測定装置1および基板ハンドリング・ロボット2は、コンピュータ3により一括制御される。
(もっと読む)
石材定盤を備える装置及び座標測定機
【課題】 石材定盤を備え、かつ石材定盤の少なくとも一面を可動部材のガイド面として使用する装置において、周囲温度の変化に伴って定盤のガイド面の真直度低下を防止する。
【解決手段】 石材定盤24を備える座標測定機1において、可動部材12A、12Bのガイド面として使用される側面24A、24Bと直交する異なる側面24C、24Dに、これらをそれぞれ覆う断熱部材60A、60Bを設ける。
(もっと読む)
シート状ガラスを測定するための装置及び方法
板ガラスを測定する装置である。この装置は安定したベースを含み、ベース上には複数の再配置可能な支持部材が配列されている。シート状ガラスは支持部材上に配置され、x−y軸及びz軸に沿って測距装置を平行移動させるシステムに連結されたレーザ測距装置等の従来の測距装置が、シート状ガラスの上方に懸下される。複数の距離測定が行われ、その後、平面からのシート状ガラスのずれが決定される。各支持部材と測定されるシート状ガラスとの接触は点接触であるのが好ましい。 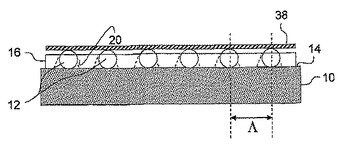 (もっと読む)
(もっと読む)
走査形プローブ顕微鏡
【課題】 光学顕微鏡を用いて試料裏面から観察を行いながら試料と探針の位置合わせを行うことが困難であったという点である。
【解決手段】 試料に対向する探針と、前記試料を置載面に置載する試料ステージと、前記試料ステージを前記置載面方向に走査すると共に、高さを変化させるスキャナと、を有し、前記探針と前記試料との間に作用する物理量により検出される信号に基づいて像を表示する走査形プローブ顕微鏡において、前記試料ステージの少なくとも試料を置載する部分が光を透過し、前記試料ステージの置載面の裏面から前記試料を写すミラーと、前記ミラーからの像を受ける光学顕微鏡と、前記試料と前記探針を相対的に位置合わせする位置合手段と、を備え、前記光学顕微鏡の像に基づいて前記試料と前記探針の位置合わせを行う走査形プローブ顕微鏡。
(もっと読む)
高さ測定装置および高さ調整装置
【課題】 部品を搭載したシャーシの基準面に対する部品の測定面の相対的な高さを正確に求めることが可能な高さ測定装置を提供する。
【解決手段】 シャーシ1を三箇所で支持する支持ピン32a,32cと、シャーシ1を位置決めする位置決めピン33aと、基準面9および測定面10の高さを計測する計測器35とが設けられ、部品2の荷重Wが作用する荷重作用部14に、部品2の荷重Wと同等の押上げ力Faをシャーシ1の下方から上向きに付与することによって、シャーシ1の下方への変形を矯正する矯正手段39が設けられている。
(もっと読む)
基板測定装置
【課題】 基板が大型化した場合においても基板を正確に測定することができる基板測定装置を提供することを目的とする。
【解決手段】 測長機は、基部10と、この基部10から応力を受けることなく、その表面が鉛直方向に対して微小角度傾斜した状態で、基部10に支持されるステージ部14と、測定を行うべき基板100の下端部を支持するためのガイドローラ42および昇降ローラ43と、ステージ部の上部と下部とに設けられたガイドレール45に案内されることにより、ステージ部14の表面に沿って左右方向に移動可能な架台15と、この架台15に設けられたガイドレール53に案内されることにより、架台15に沿って上下方向に移動可能な撮像部18とを備える。
(もっと読む)
アレイ状に微小穴を配列形成する方法、AFM標準試料及びAFM用ステージ
【課題】 底面を持ち、かつ配列制御を自由に行うことのできる微小穴の配列形成方法を提供すること。
【解決手段】 (0001)面、または(0001)面から10度以内のオフ角度を持った面を主面として有する単結晶サファイヤ基板1の表面に対して、所望の位置にアレイ状にエッチングの起点となる微小欠陥2を形成し、該微小欠陥2にエッチングを行ってエッチピット2aを形成し、該エッチピット2aに熱処理を行うことを特徴とする、アレイ状に微小穴を配列形成する方法である。
(もっと読む)
寸法測定方法及び装置
【課題】 非接触三次元測定装置を用いて製缶構造物の寸法測定を行う方法と装置を提供する。
【解決手段】 寸法測定装置1は、マスト10とターンテーブル30を備え、レーザビームを用いた三次元測定機22はマスト10に昇降自在に取付けられる。ターンテーブル30上にはワーク100が取付けられ、基準点位置に複数のスチールボールB1,B2・・・が置かれる。三次元測定機22は、複数のスチールボールの位置を測定するとともに、ワークの各部の座標位置の測定データを得る。測定データで作成されたワーク形状をCADデータに重ね合わせて、ベストフィットを得る。ベストフィットに基づいてワークの各部品の寸法を測定する。
(もっと読む)
三次元ワーク測定方法
【課題】 厳格な位置決めを必要とせず、ワークを測定できる三次元ワーク測定方法を提供する
【解決手段】 測定対象であるワーク40を、測定用ロボット20により三次元測定するための三次元ワーク測定方法であって、ワーク40上に設定された基準点のうち一点を位置決めピン12aに位置合わせして、基準点を測定する第1測定工程(ステップS5、S9、S21〜S37)と、ワーク40と同様の基準点が設定された設計値通りの理想ワークを、該基準点のうちの一点を位置決めピン12aに合わせた所定の姿勢で配置したと想定して、該理想ワーク上の基準点とワーク40の基準点の測定結果とを比較する比較工程(ステップS38)と、比較結果に基づいて、ワーク40上の測定点を測定するための前記ロボットの測定位置を補正する補正工程(ステップS6、S10、S41)と、補正した測定位置から、ワーク40上の測定点を測定する第2測定工程(ステップS42〜S48)と、を有する三次元ワーク測定方法。
(もっと読む)
表面形状計測装置
【課題】走査に用いる走査系の運動誤差を除去できる形状計測装置を提供する。
【解決手段】本発明の形状計測装置は、走査系を構成している回転スピンドル112及び直動スライド142と、スライド142上に設置されている変位センサ類で構成されている。回転スピンドル112により、計測試料120とその外周に設けられた補助試料114とが回転している。直線上に動く直動スライド142上では、計測試料形状計測用変位プローブ132と、その両側に補助試料114の表面形状及び走査系の運動誤差を計測できる2台の変位センサ134,136を設置している。試料外周部に設けた補助試料114を変位センサ134,136で2点測定して、表面形状を求めておくことにより、直動スライド142の真直度誤差、回転スピンドル112の回転運動誤差、熱膨張などによる系統誤差を全て除去できるようにしている。
(もっと読む)
走査プローブ型顕微鏡用の迅速走査ステージ
【課題】
【解決手段】走査型プローブ顕微鏡用の迅速平行移動ステージが提供される。該ステージは、平行移動ステージの自然の共振周波数にて駆動される少なくとも1つの平行移動の軸線を有し、走査方向の急速な変化に関係した歪みが回避される。1つの実施の形態において、該ステージは、好ましくは1つ又はより多くのピエゾアクチュエータ要素により駆動され、その共振周波数にて迅速走査周波数に沿って平行移動する試料板又は支持体を有している。  (もっと読む)
(もっと読む)
61 - 80 / 122
[ Back to top ]