
Fターム[3B116CD42]の内容
Fターム[3B116CD42]に分類される特許
161 - 180 / 267
製パン用食型等の集塵装置
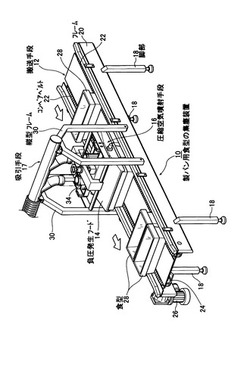
【課題】 焼成工程終了後に行われる食型内部の清掃を衛生的且つ連続的に効率よく行うことが可能な製パン用食型等の集塵装置を提供する。
【解決手段】 複数の食型28などを順次、所定位置へ搬送する搬送手段12と、搬送手段12の上部に設置され、該搬送手段12上の食型28などの上部を覆うとともに、該食型28などに対し、上方より負圧を発生させ、食型28などの内部にある異物を吸引する負圧発生フード14と、負圧発生フード14内側に配設され、食型などの内部に圧縮空気を噴射する圧縮空気噴射手段16と、を備えている。
(もっと読む)
不純物除去装置

【課題】空気中への不純物の飛散を防止する。
【解決手段】不純物を含む空気を、圧縮空気により発生する吸引力によって吸引しかつ不純物を空気と分離して捕集する不純物分離装置14を備える。不純物を含む空気を収容する密閉状の収容容器18と、収容容器18内に設けられかつ不純物が付着したノズルボデー60を保持部材64で保持した状態でノズルボデー60に圧縮空気を吹付けることにより不純物を吹飛ばす空気吹付け装置62とを備える。不純物が付着したノズルボデー60を保持部材64によって保持した状態で、空気吹付け装置62によってノズルボデー60に圧縮空気を吹付けることにより不純物を吹飛ばす。収容容器18内で吹飛ばされた不純物を含む空気は、不純物分離装置14の圧縮空気により発生する吸引力によって吸引されかつ不純物を空気と分離して捕集される。
(もっと読む)
基材洗浄装置及び基材洗浄方法
【課題】基材を洗浄する基材洗浄装置及び基材洗浄方法に係り、基材に付着した異物を効率よく除去し、また除去した異物が再付着しにくい基材洗浄装置及び当該基材洗浄装置を用いた基材洗浄方法に関する。
【解決手段】搬送される基材上に付着する異物、汚染物の種類及び位置情報を検出する検査部12と、検査部にて検出された異物、汚染物の種類及び位置情報に基づき洗浄する洗浄部13と、が基材の搬送方向に対してこの順に配置した洗浄装置とすることにより、搬送される基材が洗浄装置に入る前に、検査装置にて基材を検査し、検出された汚染物の種類および位置情報を基に最適な洗浄条件を洗浄装置に伝達するので、洗浄装置にて各種汚染物に適した洗浄条件で洗浄することができ、また汚染物が存在する部分のみを選択して洗浄することができ、結果として高い洗浄効率を実現することができる。
(もっと読む)
異物検知採集機
【課題】異物の混入箇所、種類等を迅速に認知することができ、吸引ノズルにおける吸引力を低下させることなく、異物の混入を安定して検出することができる異物検知採集機を提供すること。
【解決手段】異物検知採集機1は、主吸引機3と副吸引機4との2つの吸引機を用いる。異物検知採集機1は、主吸引機3の吸引力により、吸引ノズル22によってワーク8の清掃面81を吸引する吸引力を発生させると共に、副吸引機4の吸引力により、サイクロン容器21内に吸引された異物Pをさらに吸引し、異物検出センサ45を通過させた後、異物採集フィルタ6へ付着させる。異物検知採集機1は、異物検出センサ45によって異物Pの検出を行ったことを表示手段5によって表示する。
(もっと読む)
ダスト除去装置
【課題】装置全体を小型化にし、回転ブラシを交換し易くできるダスト除去装置。
【解決手段】ダスト除去装置1は、ワークWに付着したダストを除去する回転ブラシ11と、回転ブラシ11の動力源であるモータ15と、モータ15からの動力を回転ブラシ11に伝達して回転ブラシ11をその軸心を中心に回転させる回転動力伝達機構13と、モータ15からの動力を回転ブラシ11の往復運動に変換して回転ブラシ11をその軸方向に往復させる往復動力伝達機構14と、を備える。モータ15、回転動力伝達機構13及び往復動力伝達機構14を、回転ブラシ11の軸方向の一端側に配置した。
(もっと読む)
液体中に在る物体表面に密着し移動可能な装置
【課題】液体中に在る物体表面に密着しかつ物体表面に沿って移動することのできる装置において、物体表面を気体のみに接触せしめる気体領域を具備し、気体領域において物体表面に対して研掃作用などの作用を施す装置を提供する。
【解決手段】メインケーシングと該メインケーシングの開口部に装着され物体表面1に接触するシール部材31とが物体表面1と協働して規定する負圧領域12と;該負圧領域12の内部において物体表面1に向けて研掃材と圧縮空気を噴出する研掃材噴射ノズル84と;該メインケーシングと物体表面1との距離を任意の距離に維持し且つ物体表面に沿って移動可能な手段;とを具備し、該負圧領域12は真空源96と圧縮気体源94とに連結されるとともに、研掃材噴射ノズル84から圧縮空気を噴射する場合、負圧領域12と圧縮気体源94の圧縮空気との圧力の差圧が一定になるように圧縮空気の圧力を制御する。
(もっと読む)
自動タンク洗浄及び監視装置
タンク洗浄システムは、知られているシステムよりも効率的且つ効果的なタンク洗浄を提供する。このタンク洗浄システムはさらに、洗浄プロセスを監視することを可能にし、洗浄の確証を提供する。この点に関して、このタンク洗浄システムは、スプレーヘッド機構の制御及び監視を提供し、同時に、知られているシステムに関連した機械的な単純さ及び頑丈な性質を維持する。このタンク洗浄システムは、洗浄される容器の1つ又は複数の特性を自動的に考慮し、それに応じて洗浄動作を変更する。 (もっと読む)
エネルギ線照射による処理装置および方法
【課題】ワークをエネルギ線照射装置に対して正確に位置制御可能とし、エネルギ線によりワークに高精度な処理を行えるようにした自律型のエネルギ線照射による処理装置および方法を提供する。
【解決手段】位置決めカメラによって保持装置に保持されたワークの保持装置に対する位置ずれ量を検出し、制御装置は処理データを位置ずれ量だけ補正してステージ装置を作動させ、保持装置をエネルギ線照射装置に対して移動させるので、保持装置に保持されたワークがエネルギ線照射装置に対して正確に位置制御され、ワークの正確な位置および範囲にエネルギ線を照射して高精度な処理を行うことができる。
(もっと読む)
基板処理装置および基板処理方法
【課題】基板へのダメージを防止しつつパーティクルの除去を促進する。
【解決手段】基板Wの表面Wfに向けてDIWを供給して下層液膜11fを形成し、これを凍結して下層凍結膜13fを形成する。さらに、下層凍結膜13fの表面に向けて、下層凍結膜13fが融解しない温度に冷却されたDIWを供給して上層液膜12fを形成し、これを凍結して上層凍結膜14fを積層形成する。そして、常温のDIWを供給して下層凍結膜13fおよび上層凍結膜14fの全体を融解して、基板Wの表面Wfからパーティクルとともに除去している。
(もっと読む)
表面処理装置
【課題】被処理物に処理流体を噴き付けて表面処理する装置において、処理流体が処理領域から外に漏れたり、外部の雰囲気ガスが処理領域に入ったりするのを効率的に防止する。
【解決手段】処理ヘッド10の被処理物Wと対向すべき側部40に、処理領域80の画成部41と、その両側の処理外領域81,82の画成部42,43とを設ける。第1処理外領域81と処理領域80との境に処理流体の噴き出し口50aを形成し、処理領域80と第2処理外領域82との境に吸い込み口50eを形成する。検出手段70にて第1処理外領域81における処理領域80に近い箇所と遠い箇所との差圧を検出する。吸い込み流量調節手段54にて、上記検出差圧がゼロになるように吸い込み口50eからの吸い込み流量を調節する。
(もっと読む)
炭酸マグネシウム粉末捕集回収装置
【課題】炭酸マグネシウム粉末の捕集回収装置を継続して使用する場合に、当該炭酸マグネシウム粉末捕集回収装置の稼動率を向上させる。
【解決手段】炭酸マグネシウム粉末捕集回収装置1は、捕集フード2を有している。捕集フード2の内部には、収納容器6と複数の孔7aを有する収納容器支持板7が設けられている。捕集フード2内に飛散した炭酸マグネシウム粉末は、ファン16によって、収納容器支持板7を通って吸引される。吸引された炭酸マグネシウム粉末の大部分は、回収容器11、及びサイクロン集粉器12で回収され、残りの一部がフィルター15によって捕集される。
(もっと読む)
端面洗浄装置
【課題】 粘着ロールの寿命を従来より延ばすことができる端面洗浄装置を提供する。
【解決手段】 端面洗浄装置は、ユニットベース40と、板状の対象物であるプリント基板90に直交して延在させられてプリント基板90の端面90aに付着しているゴミを吸着する粘着ラバーロール51aと、ユニットベース40に対する粘着ラバーロール51aの延在方向とは直交する方向における位置を変更する水平駆動部60と、ユニットベース40に対する粘着ラバーロール51aの延在方向における位置を変更する垂直駆動部70とを有することを特徴とする。
(もっと読む)
管内清掃ロボット
【課題】小径円管の清掃が可能な、簡素且つ小型の管内清掃ロボットを提供する。
【解決手段】前部に配設される第1マシン部2と、後部に配設される第2マシン部3と、第1マシン部2及び第2マシン部3を連結する弾性体の連結体4とを備えた管内清掃ロボット1であって、第1マシン部2は、第1振動モータ11と、第1振動モータ11を収納する第1モータハウジング12と、第1モータハウジング12の外周部に第1スペーサ13を介して装着される第1ベアリング14と、第1ベアリング14の外周部に装着される第1外周体15と、第1外周体15の外周部に後方斜め放射方向に傾斜して植設された複数の斜毛から成り、複数の斜毛が所定の傾き角で螺旋状に配設された第1斜毛列16とを備え、第2マシン部3は、第1マシン部2と同構成であって、前後逆向きに配設される。
(もっと読む)
コンテナ容器の洗浄乾燥装置及び方法
【課題】天板に上部開口及びエア抜き口を有するコンテナ容器の洗浄乾燥装置及び方法において、エア抜き口のノズル部周辺を含めた自動洗浄を可能とすると共に、装置自体の配置スペースを抑え、かつコンテナ容器の洗浄及び乾燥を効率良く行う。
【解決手段】洗浄乾燥装置10は、コンテナ容器1内に進入して温水又はスチームを多方向に噴射しつつ回転するメインノズル17と、エア抜き口7の上方からそのノズル部7aに温水を噴射する複数のサブノズル34とを備え、各ノズル17,34から温水を噴射してコンテナ容器1内及びエア抜き口7を洗浄した後、前記メインノズル17からスチームを噴射して前記コンテナ容器1内を昇温させると共に、前記メインノズル17からのスチーム噴射により昇温した前記コンテナ容器1内に除菌エアを送入して乾燥させる。
(もっと読む)
付着物除去装置
【課題】噴射ノズルからの気体流や粒体噴射を停止した際に、ブラスト噴射回収装置内方床面に残った粒体を容易に回収することのできる付着物除去装置を提供することを課題とする。
【解決手段】自走しながら床面Yの付着物Fを除去する付着物除去装置において、車体6前方に、噴射ノズル1から気体流2とともに粒体3を噴射する噴射装置4と、該噴射ノズル1から噴射した粒体3及び剥離除去された付着物Fを回収するバキューム回収部5とからなるブラスト噴射回収装置Bを設け、該ブラスト噴射回収装置Bの後部にバキューム回収部5を設けるとともに、噴射ノズル1からの噴射を停止させた際は、所定距離前進させた後、走行を停止させるよう制御してなる付着物除去装置。
(もっと読む)
瓶等の除塵搬送装置
【課題】 多数の食品用プラスチックトレーを、押え枠で挟み付け搬送するネットコンベヤの上方からイオン化エアを噴射しトレーを1枚づつ分離させ除塵と集塵を行なう装置があるが、形態やサイズが多様な化粧品用瓶に転用できない。
【解決手段】
梁部材をケーシング内に横方向へ並列させて部材間の幅を可変可能に設け、各部材の両端部にモータ駆動軸とベルト掛けした従動軸を上端部を突出させて垂設し、従動軸の下端部に上下2連のプーリを離隔して設けプーリ間に弾性ベルトを褂架し、該ベルトのテンションロールを梁部材の非対称位置にワークを搬送する無端ベルトの上面から離隔して垂設し、コンベア上のワークを検知するとイオン化エアを噴射しワークが不在になると噴射を停止するセンサと連動するノズルをケーシングに設け、弾性ベルトに挟持され搬送されるワークへイオン化エアを常時噴射する噴射管を無端ベルトの上面から離隔して設けた。
(もっと読む)
梱包資材の除塵装置
【目的】梱包資材の表裏両面を同時に、しかも梱包資材の厚さにかかわらず連続的に除塵できる梱包資材の除塵装置を提供すること。
【構成】上記課題を解決するために請求項1記載の除塵装置は、梱包資材を搬送するための搬送手段としてロープコンベアを用い、又、イオン化エア発生手段とイオン化エアを梱包資材の表面に吹き付けるイオン化エア吹き付け手段を備えた静電気除去器をロープコンベアにおける搬送経路の上面及び下面に配設して構成した。又請求項2記載の除塵装置においてはイオン化エアが梱包資材の上面及び下面に同時に、且つ、梱包資材に対して概ね垂直に吹き付けるように構成した。更に請求項3記載の除塵装置は、搬送経路の下面に吸引ファンを配設した。又請求項4記載の除塵装置は請求項1乃至3いずれかに記載の除塵装置において、複数の棒状の押さえ部材を静電気除去器配設位置近辺のロープコンベア上に設けて構成した。
(もっと読む)
カートン清掃装置
【課題】深さの深い、また底面積の大きなカートンであっても十分な清掃が可能で、しかも構造が簡単で低コストで製造することができるようにする。
【解決手段】四辺形状の開口部を有する天板の下側に、開口部を閉塞するように、上部が開放した箱状の受皿部を設け、受皿部内に開口部の四辺の各辺に沿って棒状ノズルを設ける。各ノズルは長さ方向に沿って複数のエア噴出口を有する。また、ノズルへのエア供給手段と、受皿部内のエアを吸引するエア吸引手段を備える。カートンは蓋を開けた状態で開口部の上に倒立状態で載置する。噴出されたエアはカートンの内側面から底面に沿って流れ、カートン全内面に付着した紙粉が吹き飛ばされる。カートンは倒立状態なので、吹き飛ばされた紙粉がカートン内に残存するおそれがない。
(もっと読む)
紫外線照射装置
【課題】誘電体バリア放電ランプにおけるランプ軸方向を均等な温度分布に冷却して良好なランプ軸均斉度を実現する。
【解決手段】ペルチェ素子1と、外部電極2と、誘電体バリア放電ランプ3と、誘電体バリア放電ランプ3を構成する石英ガラス管4と内部電極5およびエキシマ生成ガス6と、を備える。ペルチェ素子1を外部電極2に密着して配置し、ペルチェ素子1の吸熱側の面を外部電極2に密着させる。一方、放熱側のペルチェ素子1の面は外部に開放されて大気と触れており、送風手段にて送風された冷却用の風(F)が放熱分を奪いペルチェ素子1を冷却する。
(もっと読む)
プラズマ発生装置及びワーク処理装置
【課題】煩雑な制御を行うことなく短時間で全てのプラズマ発生ノズルからプラズマを点灯させる。
【解決手段】受光素子101a〜101hは、近傍に配設されたプラズマ発生ノズル31から放出されるプルームPを受光する。スタブ制御部902は、全てのプラズマ発生ノズル31からプルームPが放出されたことが受光素子101a〜101hにより検出されるまで、スタブ701を連続的に変化させる。一方、スタブ制御部902は、全てのプラズマ発生ノズル31からプルームPが放出されたことが受光素子101a〜101hにより検出された後は、導波管10とプラズマ発生ノズル31とのインピーダンス整合を図ることができる規定出没長まで、スタブ701〜703を出没させる。
(もっと読む)
161 - 180 / 267
[ Back to top ]