
Fターム[3C007AS06]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 組立 (282)
Fターム[3C007AS06]の下位に属するFターム
Fターム[3C007AS06]に分類される特許
81 - 100 / 138
サスペンションアッセンブリ取り付け装置
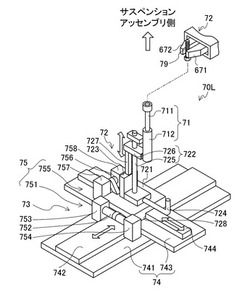
【課題】設備にかかるコストを低減できるサスペンションアッセンブリ取り付け装置を提供すること。
【解決手段】マウントシステムは、複数機種に共通する締め付け箇所を締め付ける締付ロボットと、複数機種のそれぞれに固有の締め付け箇所を締め付ける固有箇所締付ユニット70Lと、を備え、締付ロボットは、アームと、このアームの先端に取り付けられたナットランナと、を備える。固有箇所締付ユニット70Lは、ナットランナ71と、ナットランナ71をサスペンションアッセンブリに対して進退させる進退機構72と、進退機構72を進退方向と交差する面に沿って移動可能に支持する移動機構73と、を備え、上述の締付ロボットは、この進退機構72を操作することにより、進退機構72を進退方向と交差する面に沿って移動させて、固有の締め付け箇所に固有箇所締付ユニット70Lのナットランナ71を対向させる。
(もっと読む)
ワーク取付システムおよびワーク取付方法

【課題】汎用性が高くかつ小型化できるワーク取付システムを提供すること。
【解決手段】ワーク取付システム1は、ボディ2のインナパネル2Aにサンルーフ部材3を取り付ける。このワーク取付システム1は、サンルーフ部材3を把持して搬送する搬送ロボット4と、ボルトを締め付けるナットランナおよびCCDカメラを有する取付ロボット5と、搬送ロボット4および取付ロボット5を制御する制御装置6と、を備える。制御装置6は、搬送ロボット4を制御して、サンルーフ部材3を把持してボディ2のインナパネル2Aに搬送し、取付ロボット5を制御して、CCDカメラによりサンルーフ部材3のボルト穴およびインナパネル2Aを撮影して、これらボルト穴およびインナパネル2Aの位置を算出し、これら算出した位置に基づいて取付ロボット5の動作を補正して、ナットランナによりサンルーフ部材3の2箇所をインナパネル2Aに固定する。
(もっと読む)
ナットランナ支持具
【課題】ナットランナの追従性能を容易に管理できるナットランナ支持具を提供すること。
【解決手段】ナットランナ支持具70は、ロボットアーム33に取り付けられてナットランナ71を支持する。このナットランナ支持具70は、ロボットアーム33に取り付けられた基部72と、この基部72に回動可能に支持されてナットランナ71を支持するフレーム73と、を備える。基部72には、ボルト723が螺合され、フレーム73には、ボルト723が収容される収容部734が形成され、収容部734の内面とボルト723の外面との間には、緩衝材735が介装されている。
(もっと読む)
ドア取り外しシステム
【課題】ドアをボディから取り外して搬送する際に、ドアやボディが損傷するのを防止できるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステム1は、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステム1は、ドア11を把持しかつ略鉛直方向を旋回軸213として旋回可能な双腕ロボット20と、この旋回軸213に作用するトルクを検出するトルクセンサ214と、双腕ロボット20を制御する制御装置と、を備える。制御装置は、双腕ロボット20によりドア11を把持した状態で、この双腕ロボット20を旋回軸213で旋回させる際、トルクセンサ214により旋回軸213に作用するトルクを検出し、この検出したトルクが所定値以上である場合には、双腕ロボット20の旋回を停止する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ワークを目標に合わせる場合は、ブレを補正して目標軌道に沿いやすくするとともに、軌道の変更・修正を行う場合は、ワークをスムーズに移動できるように制御するパワーアシスト装置およびその制御方法を提供する。
【解決手段】操作ハンドル6と、操作ハンドル6に加えられた操作力とその向きθhを検出する力センサ7と、ロボットアーム3と、アクチュエータ11と、を備えるパワーアシスト装置50の制御方法であって、操作力の向きθhが、予め定めた操作ハンドル6の進行方向に対して所定の角度範囲内であると検出された場合には、操作ハンドル6を、操作力の進行方向成分のみを採用して、進行方向Aに沿って進行させるようにアクチュエータ11を駆動し、操作力の向きθhが、前記所定の角度範囲外であると検出された場合には、操作ハンドル6を、操作ハンドル6に加えられた操作力とその向きで進行させるようにアクチュエータ11を駆動する。
(もっと読む)
マニピュレータ
【課題】軸に直交する方向の微小な並進変位と軸まわりの回転変位を与えるコンパクトで単純な機構のマニピュレータを提供する。
【解決手段】作業を行うアーム部2と、アーム部2の回転角を制御する回転角制御部3と、アーム部2の変位を制御する変位制御部4と、を備えたマニピュレータ1において、回転角制御部3は、回転駆動力を付与する回転角付与手段31を有し、アーム部2は、回転角付与手段31に接続され、回転可能であると共に、屈曲可能な屈曲軸部21と、屈曲軸部21に接続され、屈曲軸部21が屈曲することにより移動する作用軸22と、作用軸22の先端に設置され、各種作業を行う作業部23と、を有し、変位制御部4は、作用軸22に力を付与する変位付与手段41と、変位付与手段41の駆動力を伝達し、作用軸22に常に当接する出力部材42と、を有することを特徴する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
マニピュレータ制御装置及びマニピュレータ制御方法
【課題】作業者が注目している作業映像から目を離す必要がなく、また操作中のデバイスから手を離したり、別の手で補ったりすることなく、XYZの運動指令と同一の入力デバイスで、並進3自由度の他に、マニピュレータ先端の回転等を操作するマニピュレータ制御装置及びマニピュレータ制御方法を提供する。
【解決手段】駆動部5aと、駆動部5aにより回転可能な回転軸部5bと、回転軸部5bの先端に設けられ、各種作業を行う作業部51とを有するマニピュレータ5と、作業部51の直交する3方向の並進運動及び回転軸部5bの回転運動を指示する入力デバイス2と、入力デバイス2の指示した動作をマニピュレータ5に伝える制御部3と、を備え、入力デバイス2は、本体20と、本体20に対して回転及び傾倒可能な回転操作子23を有し、本体20は、平面内の移動に応じて、作業部51の直交する2方向の移動量を指示し、回転操作子23は、傾倒に応じて、回転軸部5bの回転を指示することを特徴とする。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
荷重物取扱装置
【課題】経路に沿って移動する一対の可動要素と、荷重物を移動させる距離よりも長さが短い1つの線形アクチュエータとによって、経路に沿って荷重物を取り扱うのに適した装置を提供する。
【解決手段】案内経路2と、案内経路2に摺動可能に取り付けられた一対のスライド10a、10bと、スライドに設けられ荷重物を係合する係合手段7a、7bと、それぞれのスライドを個々に案内経路2に沿って所定位置に維持するロック手段6a、6bと、スライドを駆動する線形アクチュエータ手段3を有する。線形アクチュエータを構成する空圧シリンダである第1部品4は一方のスライド10aを駆動し、ピストンである第2部品5aは他方のスライド10bを駆動する。線形アクチュエータ手段3と、ロック手段6a、6bとを制御することで係合手段7a、7bを任意の位置に移動することが可能である。
(もっと読む)
マニピュレータ
【課題】歯車部品を歯面に当接するガイド鋼球で支持する支持台に効率よく装着する。
【解決手段】ハンド部14は、歯車部品であるワーク16を把持する3個の爪58を有する。3個の爪58のそれぞれが径方向外に向けてにスライドして、ワークの円筒面20に当接し、これを把持する。爪58は、回動自在に支持されたローラ74を有する。ワークは、このローラを介して支持されるため、ハンド部14に把持されている状態であっても回転自在となっている。
(もっと読む)
組立装置
【課題】設置面積を縮小し、小型化した組立装置を提供すること。
【解決手段】鏡枠7を支持するステージ3と、鏡枠7に取り付けるレンズ6が配置されたトレイ11と、ステージ3を取り囲んで設けられた側壁21,22,23,24、及び天井壁25と、側壁23に設けられ組立作業に用いる工具が収容された工具棚30と、側壁21に設けられ鏡枠7、レンズ6、及び工具を把持し組立作業を行うマニピュレータ1,2と、を有することを特徴とする組立装置100とした。
(もっと読む)
空間内において少なくとも1つのオブジェクトを最終姿勢に高精度で位置決めするための方法およびシステム
本発明は、空間内において少なくとも1つのオブジェクトを最終位置に高精度で位置決めするための方法およびシステムに関する。オブジェクト(12)を産業用ロボット(11)によって把持公差以内で把持および保持する。前記産業用ロボット(11)の前記把持公差を補償する調整量を求める。前記オブジェクト(12)を高精度で最終姿勢に位置調整するため、該オブジェクト(12)が所定の公差以内で該最終姿勢に達するまで、以下のステップを繰り返し行う:撮像画像を光学的撮像装置(1a,1b)によって撮像するステップ。空間座標系における前記オブジェクト(12)の実際の姿勢を、前記光学的撮像装置(1a,1b)の位置(Pa,Pb)と、角度測定ユニット(4a,4b)によって検出された前記光学的撮像装置(1a,1b)のカメラ(2a,2b)の角度方向と、前記オブジェクト(12)における特徴的要素(13)の知識とから求めるステップ。前記調整量を使用して、前記産業用ロボット(11)の現在のポジショニングと、姿勢差に関連する量とから、該産業用ロボット(11)の新たな目標ポジショニングを決定するステップ。前記産業用ロボット(11)を前記新たな目標ポジショニングに位置調整するステップ。  (もっと読む)
(もっと読む)
タイヤとホイールを組み立てるためのシステム及び方法
【課題】タイヤとホイールを組み立てるための単純なシステム及び方法を提供する。
【解決手段】タイヤTとホイールWを組み立てるための装置が開示されている。この装置は、ホイールWを保持する装置102と複数のサブステーション104a〜104gとを具備する単一セルワークステーション100を備える。この装置102は、タイヤ・ホイール組立体TWを組み立てるために、ホイールWを複数のサブステーション104a〜104gの各々へ、ホイールWを放すことなく移動する。一つの方法もまた開示されている。
(もっと読む)
小型生産設備
【課題】作業対象に対してその位置や姿勢を正確に認識して作業を行う。
【解決手段】ワークWの把持等の作業を行う小型生産設備1は、ワークWを所定の状態に保持するステージ3と、ワークWの把持等を行う第1マニピュレータ4と、第1マニピュレータ4に取付けられた第1エンドエフェクタ6と、第1エンドエフェクタ6に取付けられた第1カメラ7と、第1カメラ7の画像に基づいてワークWの姿勢等を認識する認識手段と、認識結果に基づいてワークWの姿勢等を制御する制御手段とを備え、第1カメラ7は、把持されたワークWの幅方向の端部を撮像視野に含み、かつ幅方向の端部及びワークW前方の所定の範囲を被写界深度に含むように設定されており、認識手段は、第1カメラ7が取得した画像に基づいて、ワークW及び作業対象ワークの姿勢等を認識し、制御手段は、認識結果に基づいてワークWの調整量を決定する。
(もっと読む)
教示装置
【課題】部品と治具間の取付け上の互いの寸法公差が厳密に規定されていても目視で教示作業を行うために生じる教示位置の公差外れや部品や治具の破損を防止すると共に、部品を所定の力で押し付けながら組立作業を行う場合の力パラメータを数値で手入力する必要がない教示装置を提供する。
【解決手段】回転体の回転量を被操作対象の移動量とする操作部と、回転体の回転量及び回転方向を検出するセンサ120と、センサの検出値に基づいた被操作対象の移動量を指示する操作量指示部151と、被操作対象の特定方向の移動を規定する移動軸を選択する操作軸選択スイッチ140と、当該被操作対象が移動した位置を保存することを指示する教示ボタン130と、被操作対象が受ける反力を操作者に力覚提示するためのアクチュエータ110とを備えた教示装置である。
(もっと読む)
ピアスナット打ち込み装置及びピアスナット打ち込みロボットシステム
【課題】ナット接合作業における生産性の向上を図る。
【解決手段】ピアスナットの取り付け対象となる薄板材料をカシメるためのカシメ金型と、ピアスナット及び薄板材料を挟んでカシメ金型に対向配置される対向部材と、カシメ金型及び対向部材を保持するフレーム13と、カシメ金型と対向部材の少なくともいずれか一方を他方側に押圧する駆動源となるサーボモータ17と、サーボモータに対してカシメ金型と対向部材の押圧往復動作を設定ストロークで行う動作制御を行うコントローラを備えている。
(もっと読む)
ロボット教示システム
【課題】ワークが替わるたびにプログラムを新たに作り直す必要がなく、ロボットの教示作業に必要な時間を短縮することができるロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ロボット11に取付自在のツール13と、ロボットコントローラ12を制御する制御部20とを備えている。制御部20は、ワーク固有データ30が入力される入力部21と、ロボット11の種類およびツール13の種類を指定する作業指定部22と、作業指定部22からの情報に基づいてロボット制御用中間言語31を作成する中間言語作成部23とを有している。最終言語作成部24において、ワーク固有データ30とロボット制御用中間言語31とに基づいてロボット制御用最終言語32が作成され、出力部25を介してロボットコントローラ12へ送られる。
(もっと読む)
ロボット教示システム
【課題】ロボットの教示作業に必要な時間を短縮することができ、ロボットを実際に動作させずにオフラインで教示することができるロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ロボット11に取付自在のツール13と、ロボットコントローラ12とツール13とに接続されたツールコントローラ14とを備えている。ツールコントローラ14とロボットコントローラ12とを制御する制御部20は、加工位置情報25を入力する加工位置情報入力部21と、ツール13に合わせたロボット11の動作内容を求める動作内容演算部22と、この動作内容をロボットコントローラ12へ送る出力部23とを有している。このようにして、ロボット11の手動操作を行なうことなく加工位置情報25に基づいてロボット11の教示作業を行なうことができる。
(もっと読む)
ワーク搬送装置
【課題】昇降用の駆動手段および回動動作用の駆動手段といったように、大きく重量大な駆動手段を2種類も備えなくて済み、小型で軽量に構成することができるワーク搬送装置を提供する。
【解決手段】ワークとなるウィンドウ5を把持する把持具20と、把持具20を移動可能に支持する支持アーム10とを備え、把持具20にて把持したウィンドウ5を支持アーム10によりウィンドウ5が組み付けられるウィンドウ枠7a・枠7bまで搬送するとともに、ウィンドウ5の姿勢をウィンドウ枠7a・7bに応じた姿勢に変更するワーク搬送装置1であって、支持アーム10を、複数のリンク11・12・13・14が閉ループ状に接続される閉ループリンク機構に構成し、支持アーム10の把持具20に接続される一対のリンク13・14のうち、何れか一方のリンク13・14に対する把持具20の姿勢を固定可能に構成する。
(もっと読む)
81 - 100 / 138
[ Back to top ]