
Fターム[3C007ES03]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 2つ (446)
Fターム[3C007ES03]に分類される特許
201 - 220 / 446
物体を狭持する人工ハンドの指構造及び物体の人工ハンド狭持方法
【課題】様々な形状の物体、特に床面等に密着した紙等の薄い物ならびにクリップ等の小さく且つ端面が曲面である物を安定性良く把持することが可能で、簡単な構成要素の人工ハンドの指構造と人工ハンド狭持方法を提供すること。
【解決手段】二本の指の少なくとも一方の指を動かして平面に載置された物体を狭持する人工ハンドの指構造であって、前記一方の指1は、前記物体に当接される先端部に前記物体を掬い上げる凹曲面部12を持ち、他方の指2は、前記物体に当接される先端部に前記物体を押圧する凸曲面部22を持つ、ことを特徴とする。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置

【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
サンルーフユニット把持装置およびサンルーフユニット把持方法
【課題】汎用性の高いサンルーフユニット把持装置を提供すること。
【解決手段】搬送ハンド10は、略U字形状のメインフレーム31と、このメインフレーム31のうち互いに略平行に延びる部分同士を連結するセンターフレーム33と、を有するサンルーフ部材3を把持する。搬送ハンド10は、センターフレーム33の下面が着座するセンターフレーム着座部132と、メインフレーム31のうちセンターフレーム33に略平行な部分の下面が着座するメインフレーム着座部125と、メインフレーム31のうち互いに略平行に延びる部分を、内側の側面から押圧する一対の押圧部62A、62Bと、を備える。
(もっと読む)
医療用マニピュレータ及び実験装置
【課題】可撓性部材の張力を簡便且つ適切に判断する。
【解決手段】医療用マニピュレータ10は、モータ40a〜40cを備えたアクチュエータブロック30と、アクチュエータブロック30に着脱自在でモータ40a〜40cに接続されるプーリ50a〜50cを備える接続部15と、接続部15から延在する連結シャフト48の先端に設けられ、ワイヤ54a〜54cを介してプーリ50a〜50cに連動する先端動作部12と、ワイヤ54a〜54cの途中に介装され、歪みゲージ404aが設けられた張力検出片400とを有する。張力検出片400は、連結シャフト48の延在方向に長尺な板体であり、長尺方向両端部にワイヤ54a〜54cをかけるフック406を有する。
(もっと読む)
把持装置
【課題】構造が単純で、容器の把持幅の変動を補正でき信頼性の高い把持装置を提供する。
【解決手段】少なくとも1本の軸線を中心に旋回自在に支持されており、一方の端部に把持構造部を有する2つの剛体把持アームGと、把持アームの間で動作する蓄力器20と、軸線を超えた他方の側における、把持アームの延長部分の把持アームクローズレバー3と、クローズレバーの間で回転するクローズカムNとを備え、少なくとも1つのクローズレバー3が、弾性変形両領域Bを介してクローズカムによって作動可能で、弾性変形領域がアームのセクション7であり、このアームが、クローズカムに対して作用し、把持アームとは構造的に個別で、把持アームと一緒に旋回運動するように把持アームに密着し、クローズレバーにおける止め部4とセクションとの間に、このセクションが少なくとも実質的に変形していない状態において所定の変形空間Zが設けられている。
(もっと読む)
ハンドマニプレータ
【課題】レバー部材に対する操作を停止させても掴んだ状態を継続し得ること、操作性を維持して気密性を高めること。
【解決手段】ハンドマニプレータに、トリガー状レバー部材302を引くと進出する作動棒303sと、これを進退自在に外装する、周側に貫通孔303pを開口したガイド管303gと、各貫通孔303pに挿入したクラッチボール303bと、クラッチボール303bを挿入した各貫通孔303pに対面させて配した傾斜面303tを有するクサビ面部材303wと、ガイド管303gに後退作用力を付与するバネ手段303dと、ガイド管303gを一時的に進出させる規制解除手段と、で構成する作用伝達軸307の後退動作規制手段303を付設し、支分伝達軸307dの後端と支分外装管308bの内周との間にダイヤフラム314を、ボール孔308bhの外面側に弾性シート313sを配した。
(もっと読む)
電子部品挟持装置および電子部品挟持方法
【課題】電子部品を挟持した際に、一層確実に安定した部品姿勢が得られる電子部品挟持装置を提供する。
【解決手段】このハンド(電子部品挟持装置)20は、ホルダ1と、このホルダ1のシリンダ1a内に摺嵌されたピストン2と、シリンダ1a内へのエアの供給状態に応じて、ピストン2に連動して開閉駆動される一対の可動爪10,12と、その一対の可動爪10,12同士の間に配設されたストッパ8とを有している。そして、一対の可動爪10,12は、シリンダ1a内に正圧が加えられたときには相互の先端部が離間して電子部品を解放し、シリンダ1a内へのエアの供給が遮断されたときには相互の先端部が接近して電子部品を挟持し、シリンダ1a内に負圧が加えられたときには挟持している電子部品を更にストッパ8側に引き込むようになっている。
(もっと読む)
ロボットハンド
【課題】平面上に載置された物体を持ち上げるように把持する把持動作を、適切に行うことを可能とするロボットハンドを提供すること。
【解決手段】物体を把持するための屈曲動作を行う指本体を備えるロボットハンドにおいて、指本体の先端部に弾力性を備える薄板状の爪部を取り付けるとともに、この爪部を、指本体の先端部の腹部側に取り付けることで、指本体が屈曲動作を行って物体を把持する際に、爪部により指本体が物体の底面と平面との間に挿入可能とし、把持動作を行うことができるようにした。
(もっと読む)
平行開閉チャック
【課題】フィンガーがスライド部材と爪とからなる平行開閉チャックにおいて、スライド部材に対し爪の取付け再現性が高いチャック構造の提供を課題とする。
【解決手段】2個のフィンガー13a,13bを水平方向で背反往復駆動する平行開閉チャック11であり、フィンガーはスライド部材17a,17bとこれにねじ止めされる爪14a,14bとからなる。スライド部材17a,17bはねじ用貫通孔41とスリット39を有する。スリット39は上端が閉じ下方が開放されている。爪14a,14bはねじ孔43と前記スリット39の間隔にほぼ等しい幅の突部40を側方へ突出させて有する。スライド部材17a,17bのスリット39に下方の開放箇所から爪14a,14bの突部40を係合させてねじ止めすることによりスライド部材17a,17bに爪14a,14bを固定してある。
(もっと読む)
ロボットハンド装置
【課題】ワーク置き場にワークを置く際に、ワークが受ける衝撃を小さくすることができ、かつ電気的構成が簡単なロボットハンド装置を提供することを課題とする。
【解決手段】ロボットハンド装置1は、アーム部2とハンド部3とワーク置き場4とを備えており、ワークWを所定の場所からワーク置き場4まで搬送する搬送モードと、ワークWを解放しワーク置き場4に置く載置モードと、に切り替え可能である。ロボットハンド装置1は、アーム部2、ハンド部3、ワーク置き場4、ワークWのうち、少なくとも一つを導通経路とする電気回路50を備えている。載置モードにおいては、ハンド部3に把持されたワークWがワーク置き場4に既に置かれているワークWに接触することにより、電気回路50が導通し、電気回路50の導通をトリガーとして、ハンド部3がワークWを解放する。
(もっと読む)
把持装置
【課題】簡単な機構で、把持部を高速で駆動し、かつ大きな把持力を得ることができる、把持装置を提供する。
【解決手段】第1の回転アクチュエータと、第1の回転アクチュエータによって回転駆動される第1の動力伝達機構と、第1の動力伝達機構によって駆動される第1の指と、第2の回転アクチュエータと、第2の回転アクチュエータの回転速度を減速する減速機と、減速機によって回転駆動される第2の動力伝達機構と、第2の動力伝達機構によって駆動される台車とを備え、第1の回転アクチュエータと第1の動力伝達機構と第1の指のうち少なくとも1つを、台車に載置し、第2の回転アクチュエータと減速機と第2の動力伝達機構と台車とを、台座に載置し、第1の回転アクチュエータを作動させて、第1の指を高速で駆動し、第2の回転アクチュエータを作動させて、第1の指を把持対象物に強い力で押し付け、第1の指と第2の指とによって物体を把持する。
(もっと読む)
作業機械の把持装置及びこれを備えた作業機械
【課題】大きな把持力による処理対象物の把持と、微細な把持力の調整との双方が可能な作業機械の把持装置およびこれを備えた作業機械を提供する。
【解決手段】把持装置20は、一対の把持部材30A,30Bを有する。その少なくとも一方は、把持部材本体32と、可動把持部34と、ばね部材36とを含む。可動把持部34は、処理対象物Pから受ける反力によって把持部材本体32に対しその回動の向きと逆の向きに相対的に所定量だけ後退変位することが可能となるように把持部材本体32に取付けられる。ばね部材36は、可動把持部34を内向きに付勢するためのもので、その弾性変形によって可動把持部34の後退変位を許容し、かつ、その弾発力により、処理対象物Pに対する可動把持部34の接触圧を増加させる。
(もっと読む)
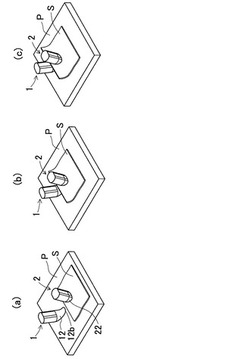
ロボットハンドとこれを用いた対象物の把持方法
【課題】把持部の交換をすることなく、複数種類の対象物を把持でき、対象物の上方に障害物が存在しても、対象物へのアクセスを容易に行えを提供する。
【解決手段】取出位置にある対象物を挟持して別の位置まで搬送する搬送ロボットのロボットハンドであって、種類が異なる第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5、7は、開閉駆動される共通のフレーム9に設けられる。第1の挟持部5は、フレーム9の閉動作により第1の対象物2を挟むように動作し、第2の挟持部7も、フレーム9の閉動作により第2の対象物3を挟むように動作する。
(もっと読む)
マテリアルハンド用クランプ機構
【課題】ワークの基準孔への差し込み時には、左右のクランプ部の間隔を狭めて挿入するため、ワークズレの発生が少なく、シリンダーロッドを伸長させて内側から左右のクランプ溝によって押圧するため、クランプ力が大きく搬送中にワークの落下することを防止する。
【解決手段】シリンダー1と、支持部20及び支持部に直角方向に設ける頭部21とからなるT字状支持体2と、スライドクランプユニット3とを有し、スライドクランプユニット3は、T字状支持体の頭部に沿って左右に移動可能である左右のクランプ部30と、左右のクランプ部30のそれぞれとシリンダーロッド10との間に2つのリンク32を回動自在に設けてなり、シリンダーロッドの伸長により左右のクランプ部30のクランプ溝31によってワークをクランプ状態にし、シリンダーロッドの縮短によりアンクランプ状態にするマテリアルハンド用クランプ機構による。
(もっと読む)
ロボットハンド
【課題】1つのアクチュエータを作動させることで複数の対象物を同時に挟持できるロボットハンドを提供する。
【解決手段】第1および第2の対象物2,3をそれぞれ挟持する第1および第2の挟持部5,7を備える。第1および第2の挟持部5,7は、開閉駆動される共通のフレーム9に設けられる。第1および第2の挟持部5、7は、フレーム9の閉動作によりそれぞれ第1および第2の対象物2,3を挟むように動作する。第2の挟持部7は、第2の対象物3を弾性力で挟持する弾性力付与機構11を有し、第1の挟持部5が第1の対象物2を挟持している状態において、第2の対象物3と第2の挟持部7との間で前記弾性力が作用するようになっている。
(もっと読む)
物品取り出し装置
【課題】安価でありながら高速かつ正確に、バラ積み状態からの物品の取り出しが可能な物品取り出し装置を提供する。
【解決手段】画像処理部22の対象物検出部22aは、ビデオカメラ18で撮影された画像を画像処理し、部品を検出する。対象物選定部22bは、複数検出された部品の内、ある規則に従い取り出し対象の部品を選定する。視線方向計算部22cは、選択された部品への視線方向を計算する。対象物位置推定部22dは、選択された部品の画像上でのサイズ情報から高さを含む位置を推定し、次に把持補正量計算部22eが、ロボットによる部品の把持に必要な補正量を計算する。
(もっと読む)
物品保持装置
【課題】紐状取手を有する取手付きの物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置10は、互いに接近および離反可能であり、接近時に物品本体A1を両側方から挟持する一対の挟持体12を備える。各挟持体12の下部には、物品本体A1の下方に対して進退可能であり、進出時に物品本体A1の下面を支持する下面支持体13を設ける。挟持体12は、物品本体A1の側面のうち紐状取手A2がない部分に当接する挟持部31と、紐状取手A2に当接してこの紐状取手A2を物品本体A1の側面に略沿った状態に撓ませる取手当接部とを有する。
(もっと読む)
ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法
【課題】不特定の硬さを有する対象物に対して、その硬さに応じた最適な把持力及び速度での移動制御を行なうことを実現したロボットハンド機構を提供することを目的とする。
【解決手段】ロボットハンド機構1は1対の指部2a及び2bを備えている。指部2a及び2bの第一節21には、サーボモータ7を介して第二節22が変位可能に連結されている。サーボモータ7にはポテンショメータ8が取り付けられており、第二節22の先端部には力覚センサ9が設けられている。ポテンショメータ8は、第二節22の変位量を制御部6に出力する。力覚センサ9は、第二節22が対象物Oに加える押圧力Fx及び第二節22と対象物Oとの間に生じる摩擦力Fyを制御部6に出力する。制御部6は、ポテンショメータ8及び力覚センサ9からの入力に基づいて対象物Oの硬さを判定し、硬さに基づいて、対象物Oを把持する把持力と対象物Oを移動させる速度とを切り替える。
(もっと読む)
ワーク把持装置
【課題】ロボットハンドに備えられ、複数の爪部でワークを把持するワーク把持装置に関し、ワークの径の変化に合わせて把持部材を移動させて、ワークの多様な大きさに対応できるワーク把持装置を提供すること。
【解決手段】シリンダーの駆動によりシリンダー軸心の上下方向へ往復移動可能に設けられた筒体と、前記シリンダーの軸心と同心に設けられ前記筒体の軸心方向の移動をガイドする案内軸と、前記本体の外方に設けられ爪部の一部を回転可能に支持するブラケット部材と、前記爪部と筒体を夫々回転可能に連結するリンク部材を備え、前記爪部がブラケット部材との支持部位を回転中心として回転移動しワークを把持する。
(もっと読む)
搬送システム
【課題】複数のワークのピン挿入穴が同径の場合に、低コストでワークの種類を判別できる搬送システムを提供することを目的とする。
【解決手段】搬送システムは、把持ツールと、多関節アームと、を備える。把持ツールは、2分割されかつ先端に向かうに従って細くなるテーパ形状の把持ピン34A,34B,34Cを備え、複数種類のワークW1,W2には、基準面Nの略垂直方向から把持ピン34A,34B,34Cが挿入されるピン挿入穴PA,PB,PCが形成され、このピン挿入穴PA,PB,PCは、内径および基準面Nの面内方向の位置が共通であるが、基準面Nからの高さが互いに異なる。この搬送システムは、2分割された把持ピン34A,34B,34Cをピン挿入穴PA,PB,PCの内壁面に当接するまで互いに離間させた際に、把持ピン34A,34B,34C同士の間隔を測定して、この測定した間隔に基づいて、ワークW1,W2の種類を判別する。
(もっと読む)
201 - 220 / 446
[ Back to top ]