
Fターム[3C007HT02]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556) | ベルト (274)
Fターム[3C007HT02]に分類される特許
41 - 60 / 274
人工筋肉及び柔軟関節機構
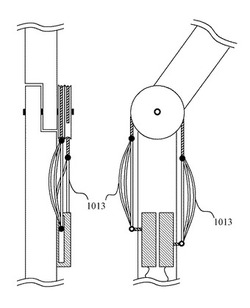
【課題】使用目的・使用状況に応じ剛性を任意に構成可能な駆動機構とそれを用いた柔軟関節機構を提供する。
【解決手段】駆動基盤本体に固定された二台のサーボモータとアームに固定されたプーリとの間を、複数の弾性体を束ねてなる負荷変位特性生成部1013を介して接続し、拮抗機構を構成する。複数の弾性体は例えばゴムであって、長さを異ならせることによって、サーボモータで引張したときに伸び始める点、すなわち発火点が異なるようにする。二台のサーボモータを反対方向に駆動すればプーリが回転し関節が回転する。同一方向に駆動すればプーリすなわち関節は回転しないが負荷変位特性生成部が伸縮し、プーリすなわち関節の回転剛性を可変できる。弾性体が複数あることから負荷変位特性は折れ線とすることができる。
(もっと読む)
チャック装置およびロボットアーム

【課題】ワークの搬送効率をより向上することができるチャック装置を提供すること。
【解決手段】チャック装置1は、チャック部10〜50を備える。チャック部10は、3つのチャック11を支持する支持板12が連結部材13によりギア14と連結されてなる。支持板12は、側板62にY方向に沿って上下に移動自在に支持されている。駆動側のギア82の回転によりギア87が回転すると、クランク機構である連結部材13により回転運動が直線運動に変換され、支持板12が上下に往復運動し、チャック11も上下に往復移動する。チャック部20〜50も同様である。チャック装置1は、隣り合うチャック部同士の往復方向における位置にずれが生じるように構成されている。例えば、チャック部20が前進すれば隣のチャック部10が後退する動作を行う。これにより隣り合うチャック部の間隔を広げなくてもチャックの数を増加してワークの搬送効率を向上できる。
(もっと読む)
ウェーハ搬送ロボット用のハンド、ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】ウェーハの搬送ハンドを小型、軽量化し、さらに1つのハンドで異なるウェーハ口径でも、ウェーハの撓みや位置ずれを生じさせない最適な吸着位置を選択してウェーハを保持し、ウェーハを目的位置に搬送することができるハンドを提供する。
【解決手段】ウェーハを搬送するウェーハ搬送ロボットのアームに取り付けられ、ウェーハを吸着保持するための真空吸着穴が設けられたフォークを備えるウェーハ搬送ロボット用のハンドにおいて、フォークは、フォーク長手方向を回転軸として自転可能に設けられ、上面がウェーハを保持する保持面を構成し、各保持面には少なくとも1つの真空吸着穴が互いに異なる位置に設けられている構成とした。
(もっと読む)
スカラーロボット
【課題】上下軸の雰囲気と外環境とをジャバラにより隔離して当該雰囲気の外環境への流
出を抑制する上下軸を、ジャバラによる隔離を維持しつつ、より高速な上下動に対応させ
ることのできるスカラーロボットを提供する。
【解決手段】スカラーロボットには、支持軸14に回動可能に設けられた第2のアーム1
5に、第2のアーム15に貫通支持して第2のアーム15に対して少なくとも軸線方向に
移動させる上下回転軸16と、上下回転軸16を外環境と隔離させるジャバラ19,20
とが設けられている。上下回転軸16の下端部17と第2のアーム15の下部との間に設
けられる下側ジャバラ20内の雰囲気を、上下回転軸16の上昇に伴い下側ジャバラ20
が収縮するとき下側ジャバラ20の外環境に流出させずに第2のアーム15の内部に流入
させるように下側ジャバラ20内と第2のアーム15内とを連通させる連通路30を備え
る。
(もっと読む)
アーム機構およびそれを備えた真空ロボット
【課題】高剛性で耐熱性もある真空環境内に適した真空ロボットのアーム構成を提供すること。
【解決手段】内部に気密な空間を有するアームベース8と、アームベース8内に設置されたアーム駆動用モータ9と、アーム駆動用モータ9によって回転する中空の減速機シャフト31と、減速機シャフト31の回転が入力されて所定の比だけ減速し、減速機シャフト31の周囲で回転する第1減速機出力軸32と、からなり、アームベース8内に減速機シャフト31の下端が露出するよう設置された第1減速機10と、中空の減速機シャフト31の上端が侵入することでアームベース8の気密な空間と同圧となる気密な空間を有し、かつ第1減速機出力軸32に固定される第1アーム2と、第1アーム2の先端に設置され、入力軸が減速機シャフト31と接続された第2減速機15と、第2減速機15の出力軸に固定され、内部に気密な空間を有しない第2アームと、第1アーム2と第2アーム5とに追従するリンク機構と、を備えた。
(もっと読む)
人型歩行ロボット用脚
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
ローダ装置及び部品の搬送方法
【課題】可搬重量の低下及び動作スピードの低下を抑制しつつ小型化することができるローダ装置を提供する。
【解決手段】第1の方向に沿って延びる動力伝達軸4には、外周面に螺旋状の螺子溝及び第1の方向に沿って延びるスプライン溝が形成されている。動力伝達軸4に螺合されたボールねじナット7は、第1駆動モータ31から伝達された回転運動をねじ作用により動力伝達軸4の第1の方向の直線運動に変換する。動力伝達軸4に装着されたボールスプラインナット8は、第2駆動モータ41から伝達された回転運動を動力伝達軸4に伝達して動力伝達軸4を該動力伝達軸4の中心軸線L2回りに回転させる。チャック66が連結された動力伝達ベルト64は、第1の方向に沿って動力伝達軸4と一体移動可能であるとともに、動力伝達軸4から伝達された動力伝達軸4の中心軸線L2回りの回転運動を第2の方向の直線運動に変換してチャック66に伝達する。
(もっと読む)
ベルトの駆動装置及びそれを備えたロボット
【課題】ベルト駆動装置やロボットの動作性能の低下を防止するとともに、ロボットのメンテナンス時期を通知することを課題とする。
【解決手段】ベースに対して回転可能な駆動プーリ7と従動プーリ8との間に掛けられて一定の張力が維持されるベルト6と、駆動プーリ7を回転させるサーボモータ11と、サーボモータ11を制御するコントローラ15と、張力を測定可能なロードセル10と、を少なくとも備えたベルト駆動装置において、コントローラ15が、ロードセル10の測定結果からベルト6の固有振動数を算出する自動設定部155を備え、測定結果が問題の無い張力であったとき、サーボモータ11を駆動するモータ駆動部152のノッチフィルタのカットオフ周波数として固有振動数を設定する。
(もっと読む)
多関節ロボットシステム、多関節ロボット、力測定モジュール、力測定方法およびプログラム
【課題】 多関節ロボットのリンクおよび関節に作用する力やモーメントを測定すること。
【解決手段】 本発明の多関節ロボットは、関節部に設けられ、駆動力発生側の駆動軸および駆動力出力先のリンク174側の出力軸176それぞれに、軸心から離間した箇所で固定され、該箇所に作用する偶力に応じて弾性的に曲げ歪みを発生する歪み発生部材190と、歪み発生部材190に接して配置され、曲げ歪みを検出する歪みセンサとを含む。測定制御手段は、関節部の軸まわりに発生する負荷トルクを歪みセンサの出力値から算出し、仮想仕事の原理に従って関節部の負荷トルクからリンクに作用する力に換算する演算手段を含む。
(もっと読む)
産業用ロボット
【課題】2本のアームを個別に伸縮させることが可能であっても、2本のアームの伸縮動作や本体部に対する回動動作を安定させることが可能な産業用ロボットを提供すること。
【解決手段】第1アーム5は、第1アーム部11と、第1アーム部11に保持される第2アーム部12とを備え、第2アーム6は、第3アーム部13と、第3アーム部13に保持される第4アーム部14とを備えている。ロボット1では、第1アーム5と第2アーム6とを個別に伸縮させることが可能となっている。また、ロボット1では、第1アーム部11の回動中心と第3アーム部13の回動中心とは同軸上に配置されるとともに、第1アーム5と第2アーム6とは、第1アーム5および第2アーム6が縮んでいる状態で仮想線Lに対して略線対称になるように構成され、第1アーム部11と第3アーム部13と第2アーム部12と第4アーム部14とは、上下方向においてこの順番で配置されている。
(もっと読む)
真空搬送装置及び表示装置の製造方法
【課題】
ストロークの大きな真空搬送装置であっても、適時にその駆動系を覆う容器の内部を真空排気出来る基板搬送装置を提供することを本発明の課題とする。
【解決手段】
本発明の係わる真空搬送装置は、内部を排気し得る第一の容器、前記第一の容器内に位置する内部を排気し得る第二の容器、前記第二の容器を一の方向に並進移動をさせる運動手段、排気手段と連通/遮断をするバルブ及び第一の容器に設けられた中空部分を有する第一の接合部、前記第二の容器に設けられた前記第一の接続部に対向する中空柱状体の突出部並びに前記中空柱状体の突出部の内側を移動可能で、前記第一の接合部に前記運動手段により接合可能な中空柱状体の部分を有する第二の接続部を有する構成とする。
(もっと読む)
被塗装物保持ロボットおよび塗装用ロボットシステム
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
産業用ロボットの手首駆動構造
【課題】手首部材を支持するアームをスリム化させた産業用ロボットの手首取付構造を提供する。
【解決手段】ロボットの第2アーム14に手首部材15を揺動可能かつ回転可能に配設する。手首部材15の揺動機構は、手首部材15と連結されると共に第2アーム14に回転自在に配設された第1従動回転軸22に軸支された第1歯車21と、第1モータ61と、減速機40と、第1モータ61の回転を減速機40に伝達する第1ベルト64と、減速機40の出力側回転軸に軸支され第1歯車21と噛合する第2歯車41を有する。手首部材15の回転機構は、第2モータ66と、第1従動回転軸22と同軸に配置された第2従動回転軸31と、第2従動回転軸31の回転をこれと直交する軸の回転に変換する傘歯車35,36と、第2モータ66の回転を第2従動回転軸31に伝達する第2ベルト69を有している。第1ベルト64と第2ベルト69を同一面内で回転させる。
(もっと読む)
回転駆動機構の取付構造
【課題】歯車間のバックラッシの調整を作業者の経験等に依存することなく簡単に行うことができる回転駆動機構の取付構造を提供する。
【解決手段】従動回転機構20の第1歯車21と、回転駆動機構の1種である減速機40の第2歯車41とを噛合させる際のバックラッシを調整する。フレーム50の減速機取付部30に、同一円周上に位置するように等間隔で複数のボルト挿通孔80を形成し、減速機40のケーシング43にボルト挿通孔80と連通するように第2歯車41の回転中心に対して偏心した同一円周上に位置する複数のネジ穴70を形成する。ネジ穴70とボルト挿通孔80とが連通するようにケーシング43の取付位置を変更し、その際に第1歯車21と第2歯車41との間のバックラッシが所望の値となる状態を選び、ボルト挿通孔80を通してネジ穴70にボルト75を螺合し、ケーシング43を取り付ける。
(もっと読む)
ワーク搬送ロボット
【課題】ロボット本体およびアーム相互間の成す角度を各々光学的に正確に検出することにより、最終的な搬送位置のズレを生じさせないようにしたワーク搬送ロボットを提供する。
【解決手段】ロボット本体と、該ロボット本体に対して順次関節部を介して相対回動可能に連接された複数のアームと、該複数のアームの先端側アームに相対回動可能に取付けられたリストブロックと、上記複数のアームの各々を回動作動する連係手段と、上記連係手段を所定の連係関係で駆動する駆動手段とを備えてなるワーク搬送ロボットであって、上記ロボット本体および複数のアーム間の各関節部には、ロボット本体およびアーム相互の相対的な回転角度情報を示す角度情報表示部42と、該角度情報表示部の角度情報を光学的に読み取る光学センサー51とを設け、上記各関節部の連結軸を介して相互に相対回動するロボット本体およびアーム相互の実際の回転角を検出できるようにした。
(もっと読む)
ロボット
【課題】ピック&プレースの作業が可能なものにあって、比較的簡単な構成でありながらも、部品供給部と部品組付部との間の途中部位の障害物を容易に乗越える。
【解決手段】X軸方向に水平に延びるX軸レール6の前面側に、移動体7を直線移動可能に設ける。移動体7の前面部に、回動アーム8の基端側を、R1軸を中心に回動可能に連結する。回動アーム8の先端側に、下端に作業用ツール10を有する手首部9を、R2軸を中心に回動可能に連結する。回動アーム8内に、移動体7に対して回動アーム8を回動させるための、回動用モータ16、減速機17等からなる駆動機構13を設ける。回動アーム8内に、手首部9の絶対的な向きを一定に保持するための、第1のプーリ15、第2のプーリ21、ベルト22等からなる姿勢保持機構14を設ける。
(もっと読む)
基板搬送ロボット
【課題】
複数のアームが連結されたアームユニットを備えた基板搬送ロボットにおいて、当該アームユニットの交換・組立、及び調整の作業性を高めることである。
【解決手段】
ベースKに昇降可能に支持された昇降フレームFと、当該昇降フレームF内に配置された駆動モータM1 により旋回される基端アーム(第1アーム)A1 を含む複数のアームA1 ,A2 と、先端アーム(第2アーム)A2 内に配置された駆動モータM2 により旋回されるハンドH1 ,H2 とを備え、複数のアームA1 ,A2 のうち前記基端アーム(第1アーム)A1 を除く残りのアーム(第2アーム)A2 は、当該アームA2 が旋回軸S2 を介して支持されている手前側のアームA1 内に配置された駆動モータM2 により旋回され、前記複数のアームA1 ,A2 が連結されたアームユニットUは、前記昇降フレームFに対して着脱可能な構成の基板搬送ロボットであって、前記アームユニットUは、前記基端アーム(第1アーム)A1 の駆動モータと一体となって、前記昇降フレームFに対して着脱可能な構成とする。
(もっと読む)
ダブルハンドロボットの減速機構
【課題】
ダブルハンドロボットにおいて、下側に配された歯付ベルト伝動機構の組み立てと歯付ベルトの張力の調整を容易に行えるようにすることである。
【解決手段】
第2アームA2 の床板部2における下側の減速プーリユニットU2 が配置される部分は部分的に開口されて、当該下面部分開口3は下蓋体21により閉塞される構成にして、下側に配置される減速プーリユニットU2 の第2アームA2 の長手方向Qに沿った固定位置を当該第2アームA2 の下側から前記下面部分開口3を通して調整可能にすることにより、下側の減速プーリユニットU2 の軸心C41,C42とハンド旋回軸36,37の軸心C3 との軸心間距離L1,L2 を調整して、下側の歯付ベルトV22の張力を調整可能な構成とする。
(もっと読む)
ロボットの関節構造、及びそれを備えるロボット
【課題】コンパクト且つ軽量化された手首構造を提供する。
【解決手段】手首構造1は、各々回動可能に設けられる基端側ケーシング11と、可動ケーシング16と、先端側ケーシング11とを備える。基端側ケーシング11と可動ケーシング16とにB軸回りに可動ケーシング16を揺動させるB軸用減速機構24が架設され、可動ケーシング16と先端側ケーシング19とにT軸回りに先端側ケーシング19を回転させるT軸用減速機構35が架設され、基端側ケーシング11と可動ケーシング16とにB軸上に設けられた伝達軸31によりT軸用減速機構35の入力軸24aに回転駆動力を伝達する伝達機構30が架設されている。可動ケーシング16は、B軸用減速機構24の入力軸24a及び伝達軸31の一端部を軸支する支持部25を有する。
(もっと読む)
ロボット及び物品搬送システム
【課題】機能を維持しながらもより小型化することができるようにした、ロボット及び物品搬送システムを提供する。
【解決手段】アーム部材23と、アーム部材23を揺動させるアクチュエータ22と、アーム部材23の先端に設けられるハンド部材24と、アーム部材23とハンド部材24とを回転可能に連結する関節部材と、アクチュエータ22を支持し直線駆動するリニアアクチュエータ3と、アクチュエータ22及びリニアアクチュエータ3を協働させての各ハンド部材を進退方向に直線移動させるコントローラとを有して構成する。
(もっと読む)
41 - 60 / 274
[ Back to top ]