
Fターム[3C007MT00]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972)
Fターム[3C007MT00]の下位に属するFターム
操作の容易化 (178)
制御、動作の高速化 (87)
構造の単純化 (27)
精度、正確性の向上 (181)
振動防止、安定性 (83)
自動化、システム化 (23)
動作、作業範囲の拡大 (7)
複数パターン、変化への対応 (220)
特定用途への適用 (22)
環境対策(エコロジー) (2)
省エネ (50)
エンタテインメント性の向上 (51)
オープン化、ネット対応 (15)
耐久性の向上 (14)
Fターム[3C007MT00]に分類される特許
1 - 12 / 12
ロボット制御方法及びプログラム
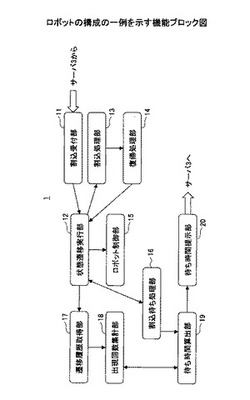
【課題】サービスロボットの利用効率を向上すること。
【解決手段】ロボット制御方法において、ロボットの状態遷移の履歴を保持し、制御装置で発生されたロボットに対する割込要求を受け付け、ロボットが割込要求を割込可能の状態にない場合はロボットの状態遷移の履歴に基づいて割込要求に対して推定される割込処理の待ち時間を算出し、前記制御装置に対して待ち時間を提示するように構成する。前記状態遷移の履歴を保持する工程は、前記ロボットの状態遷移の履歴を状態遷移列の形で保持し、前記ロボットが任意の状態から異なる状態に遷移する状態遷移列の出現回数を求める工程を更に含み、前記待ち時間を算出する工程は、前記状態遷移列とその出現回数に基づいて前記待ち時間を算出する。
(もっと読む)
ロボットの電磁ブレーキ制御装置

【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。
(もっと読む)
アプリケーション管理システム及びその管理方法
【課題】本発明は、アプリケーション管理システム及びその管理方法に関する。
【解決手段】アプリケーション管理システムであって、複数の連続する所定の時間信号を周期的に出力するクロック・ユニットと、受信した2つの連続する時間信号の間でアプリケーションが実行される実行回数を計算するカウント・ユニットと、エイジテーブルを格納する記憶ユニットと、処理ユニットと、を具備する。又、本発明は、アプリケーションの管理方法にも関する。
(もっと読む)
フロッグレッグアームロボットおよびその制御方法
【課題】フロッグレッグアームロボットにおける制御上の特異点を実用的に解消するとともに、フロッグレッグアームロボットのスムーズな動作を実現する。
【解決手段】このフロッグレッグアームロボットは、手首回転軸部に接続され、自らが接続された同回転軸部にトルクを供給するトルクモータと、フロッグレッグアームロボットを構成する各腕部が駆動装置によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、トルクが手首回転軸部に、前記各腕部が所望の姿勢に移行することができる方向に供給されるように、トルクモータを電気的に制御する制御部とを備えている。
(もっと読む)
非ホロノミックマニピュレータ
【課題】 劣駆動マニピュレータは、軽量、低コスト化が見込まれて種々の研究がなされているが、制御が難しく実用化の例は少ない。劣駆動マニピュレータの利点を活かしかつ制御をやさしくするような構成法が課題であった。
【解決手段】 遊星ギアユニットのプラネタリギアキャリアに第一リンクを固定し、リングギアに第二リンクを固定し、これらに第三リンク、第四リンクを追加してパンタグラフを構成する.またサンギア回転軸にアクチュエータを設けた構成とする。こうすると劣駆動マニピュレータでありながら、簡単な比例制御でハンド部を任意の円軌道や任意角度の直径軌道を動かすことができることを確認した。
(もっと読む)
異物検知方法およびロボット
【課題】任意の部位に取り付けられた盗聴器や盗撮器などの異物の有無を検知可能とする。
【解決手段】ロボット1は、車輪201、筐体200、上腕202、前腕203、ハンド204をそれぞれ回転可能に連結した関節300、関節301、関節302、関節303を有する。ロボット1は、各関節に備えたモータで部材を回転し、関節ごとにモータの軸回りの慣性モーメントを検出する。ロボット1は、検出された慣性モーメントの値と異物が付着していないときの慣性モーメントとを比較し、部材に付着した異物があるか否かを判断する。
(もっと読む)
操作訓練装置
【構成】ロボット20は、教師側ジョイスティック12bの操作に対応する動きを示す。かかるロボット20のリアルタイム画像は、生徒ST用のモニタ14c上の或るウィンドウに表示される。教師側ジョイスティック12bの姿勢と生徒側ジョイスティック14bの姿勢とを示すガイド情報は、ロボット20のリアルタイム画像の表示処理に関連して、モニタ14c上の別のウィンドウに表示される。生徒STの習熟度は、教師側ジョイスティック12bおよび生徒側ジョイスティック14bの姿勢の相違に基づいて算出される。算出された習熟度Mは、モニタ14cに表示されるとともに、教師TC側の通信端末12に向けて送信される。
【効果】生徒の操作能力を客観的かつ正確に評価することができる。
(もっと読む)
ロボット制御装置
【課題】各部材の設置の自由度を向上させることができるロボット制御装置を提供することにある。
【解決手段】筐体2内の略上下中央に平板状の隔壁60を設けた。その隔壁60によって形成される下側収容空間S1にモータドライバ40を設けるとともに、上側収容空間S2に第1スイッチング電源ボード70及び第2スイッチング電源ボード72を設けた。また、筐体2のベース部3の内側面にCPUボードを設けて、そのCPUボードの上面と、左側板4及び右側板5の前面4a,5aよりも突出して形成したベース部3の突出部3bの上面とに駆動制御ボード20を設けた。
(もっと読む)
自律移動ロボット及びその収納庫の操作者の撮像方法
【課題】 収納庫の施錠・解錠を行った操作者の容姿を確実に撮像して記録することができる自律移動ロボットを提供する。
【解決手段】 自律移動ロボット1の周囲に存在する障害物の有無を検出可能なセンシング手段2と、自律移動ロボット1の移動する範囲内の地図を記憶する記憶手段3と、自律移動ロボット1が移動するための移動機構4と、移動機構4を制御する制御部5と、施錠・解錠が可能な収納庫6と、収納庫6の施錠・解錠の操作を行った操作者の容姿を撮像するための撮像手段8と、撮像手段8で撮像された画像を記録する画像記録手段9とを自律移動ロボット1に備える。収納庫6の施錠・解錠の操作を行う際に、その操作者の容姿を撮像手段8で撮像した画像と、同地点において操作者が存在しない状態で撮像された画像とを比較することによって、収納庫6の施錠・解錠の操作を行った操作者の容姿を撮像手段8で確実に撮像したか否かを判断する。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
ロボット指関節等に応用できる高感度トルクセンサ調整方法
【課題】センサの材質および寸法を調整してアクチュエータトルクに存在するセンシングに必要なトルクを小さく調整する方法および、センサの感度拡大率とセンサの材質、寸法および上述した諸トルクの間の関係を明確にし、これらの関係を適当に調整して大きな感度拡大率を持たせるセンサを提供することを目的とする。
【解決手段】センサ機構1は、関節回転部2に装着し、モータ3と第1指リンク9の間にセンサ5と回転軸6が機構的に並列につながっている。指関節トルクを正確にセンシング及び制御するために、アクチュエータからのトルク=関節軸にかかるトルク+センサにかかるトルク、の関係からその三者中の任意の二者がそれぞれ線形関係を有し、それによってセンサ設計の時に三者間の関係を作業要求に応じて調整可能にしたことを特徴とするトルクセンシングを行う方法である。
(もっと読む)
立体計測装置
【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
1 - 12 / 12
[ Back to top ]