
Fターム[3C038CA06]の内容
スパナ、レンチ、ドライバーの細部、付属具 (2,087) | 締付力制御手段(検知手段) (373) | 検知対象 (266) | トルク検知 (154)
Fターム[3C038CA06]に分類される特許
121 - 140 / 154
ボルト・ナット締付機及びネジ締め工法
【課題】 1台の締付機で、仮締めと本締めの切替えを可能にする。
【解決手段】 モータ1の回転を減速機構2を含む回転伝達経路を介して締付ソケット8に伝達してボルト・ナットの締付けを行うボルト・ナット締付機において、回転伝達経路に高速・低トルク運転と、低速・高トルク運転に手動で切り替える変速装置4を設けた。締め付けるべき複数のネジに対して、先ず、高速・低トルク運転で全てのネジを仮締めしてから、全てのネジについて、低速・高トルク運転で本締めする。締付トルクにバラツキは生じない。
(もっと読む)
締付データ管理システム、締付データ管理装置及び締付工具

【課題】 締付部材の締め忘れや締め付け不良を防止できる締付データ管理システム、締付データ管理装置及び締付工具を提供することにある。
【解決手段】 締付データ管理装置4のモニタ16に、トルクレンチから順次受信したトルクデータによるトルク計測値をその都度表示してゆきトルク計測値全てを一覧表示するようにした。従って、締付データ管理装置4では、トルクレンチ2から受信したトルクデータによるトルク計測値の全てをリアルタイムで一覧表示させてゆくことにより、トルクレンチ2で締め付け作業を終えた複数のボルト全ての締め付け状態を作業者に対して一段と容易に、かつ瞬時に確認させることができ、かくしてボルトの締め忘れや締め付け不良を防止できる。
(もっと読む)
インパクト式のネジ締め装置の制御方法および装置
【課題】電動式のモータを回転駆動源とするインパクト式のネジ締め装置において、締付トルクの精度の向上とネジ締めに要する時間の短縮を図ること。
【解決手段】電動式のモータを回転駆動源とするインパクト式のネジ締め装置の制御方法であって、モータに電流を間欠的に供給してモータの回転により負荷に与えられるトルクが時間軸上でパルス状となるように、モータを回転駆動するとともに、トルクが第1の設定値である目標接近トルクTQNに達した後は、トルクの各パルス状の回毎の増加分が目標接近トルクTQNに達する前よりも小さくなるように、各パルス状の回毎の電流を制御する。
(もっと読む)
トルクレンチ
【課題】 締付けトルクの範囲に対応して有効長が異なるものでありながら、締付部以外の箇所の主要部品を共用することを可能にしたトルクレンチを提供する。
【解決手段】 ラチェット等の締付部10と、前側カバー部21と後側グリップ部22との二分割構造になったハウジング20と、ハウジング20内に設けられており且つ締付部10を取り替え可能に連結された起歪体30と、起歪体30に設けられ且つ締付部10の締付力に伴う起歪体30の歪み量を検出する歪みセンサ40と、予め用意されたトルク基準値及び歪みセンサ40の検出結果に基づいて締付部10の締付けトルクを演算する等の機能を有したチップマイコン100と、締付けトルク等を出力する出力部300とを具備している。
(もっと読む)
ボルト締結方法及びその装置
【課題】 トルク+角度法に準じた締結方法をとりながら、屈曲した締付トルク特性においても軸力のばらつきが抑制でき、初期締結域の存在要因となる現象によって被締結部材に作用する有効なボルト軸力の低下量を適正に補正する。
【解決手段】 スナッグトルクTAまでボルトを締付けた後、初期設定角度θAと、補正増締角度(θB+θc)との合計角度θsまでボルトを回転させる。補正増締角度(θB+θc)は、後期締結域IIにおける締付トルク特性線C2の延長線上のスナッグトルクTAに対応する締付角度θ22と、実際のスナッグトルクTAに対応する締付角度θ11とのずれを補正する第1補正増締角度θBと、初期締結域Iの存在要因となる現象によって後期締結域IIにおける被締結部材に作用する有効なボルト軸力が低下することを、軸力低下量が大なるほど補正量が大である第2補正増締角度θcとの和として演算される。
(もっと読む)
電動ドライバ
【課題】 トルクリミッタ付のものにおいて使用感や使い勝手を向上させる。
【解決手段】 先端ハウジング6の筒状部7と出力軸8との間に、出力軸8の正回転時には出力軸8の回転を許容し、出力盤15と連結盤19との間に設けたトルクリミッタの作動に伴う出力軸8の筒状部7に対する相対的な逆回転時には出力軸8の回転を規制するワンウェイクラッチ38を設ける一方、正逆切替スイッチ11とワンウェイクラッチ38のクラッチリテーナ42とをリンクレバー52及び切替スリーブ51,連結板54で連結し、切替操作部55によるモータ4の逆回転への切替操作に連動して、クラッチリテーナ42をクラッチ解除位置へ回転させて、ワンウェイクラッチ38による出力軸8の回転規制を解除可能とした。
(もっと読む)
インパクト回転工具
【課題】構成の複雑化やコスト増を招くことなく締付トルクを制御可能とするインパクト回転工具を提供する。
【解決手段】位置検出手段52は磁気センサ12a,…が出力する矩形波の磁気検出信号の立ち上がり及び立ち下がりを検出し、各エッジに同期したパルスを生成して出力する。速度検出手段22では、位置検出手段52が出力するパルスの間隔からブラシレスモータ1の回転速度を演算し、検出速度に応じたパルス幅の検出パルスを出力する。ハンマによる打撃は、速度検出手段22で検出するブラシレスモータ1の検出速度に基づいて打撃検出手段24が検出する。故に、ブラシレスモータ1の駆動制御に用いられる位置検出手段52の検出結果に基づいてハンマによる出力軸3の打撃を検出しているので、従来例のようにハンマによる打撃を検出するためだけに回転センサ4等を設ける必要がなく、構成の複雑化やコスト増を招くことなく締付トルクを制御できる。
(もっと読む)
トルクレンチ
【課題】 締め付け方向、および、締め付け完了などの適切な使用方法を作業者に容易に認識させることが可能なトルクレンチを提供する。
【解決手段】 トルクレンチ10は、操作アーム12と、この操作アームの先端で前記操作アームに対して回動可能に配設されたヘッド部14と、前記操作アームに対して前記ヘッド部を所定の方向に付勢するコイルバネ42とを備えている。このトルクレンチ10は、螺合により1対の部材(雄ネジ部104およびネジ穴部112a)を互いに対して締め付けるために使用される。このトルクレンチ10は、前記1対の部材の一方に対する前記1対の部材の他方の締め付け方向を作業者に認識させるように表示する表示灯54と、前記表示部に接続され、前記表示部を点灯させる電力を供給する蓄電池とをさらに備えている。
(もっと読む)
インパクト締付け工具
【課題】 打撃の誤検出を確実に防止することのできるインパクト締付け工具を提供する。
【解決手段】 モータ1の回転力をハンマによる打撃と共に出力軸3にまで伝達する打撃機構2と、打撃により生じる締付トルクTを算出する締付トルク算出部12と、打撃機構2の打撃発生を検出する打撃検出部11と、締付トルク算出部12により算出した締付トルクTが規定値に達した時点でモータ1の回転を停止させるモータ制御部6とを具備したインパクト締付け工具において、打撃間隔中に電流検出部13が検出する電流値情報を用いて打撃検出の正誤を判定する打撃正誤判定部14を具備し、上記締付トルク算出部12を、打撃正誤判定部14により誤検出と判定された打撃を無効としたうえで締付トルクを算出するものとする。
(もっと読む)
タスクスキルによるボルト組付け装置
【課題】
位置誤差にロバストで様々なサイズのボルトをナットに組付ける人の器用さをロボットに実装するためのボルト組付けタスクスキルを実装するタスクスキルによるボルトの組付け装置を実現する。
【解決手段】
ボルト12の組付け作業をタスクスキルに基き実行する。タスクスキルの動作手順として、動作手順をタスクスキルのモデルである初期条件、タスクスキル動作、終了条件に基づいて作動させる。また、タスクスキル動作にはインピーダンスと力のハイブリッド制御、またはインピーダンス制御を制御装置11に実装した。
(もっと読む)
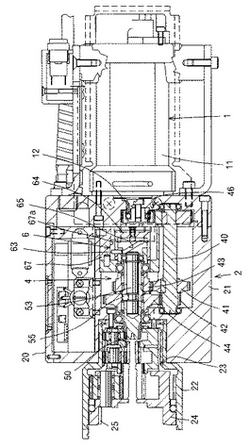
部品締結ドライバユニット
【課題】ねじ部品をねじ込む時に発生する衝撃トルクによるねじ部品の過剰締め付けを防止しつつ、高速にねじ締め作業を行うことができる部品締結ドライバユニットの提供。
【解決手段】本発明は、ACサーボモータ20の駆動軸20aと駆動工具25とをねじりコイルばね22を介して連結し、駆動軸20aの絶対回転角度を示す信号を出力可能なレゾルバ21と、駆動工具25の絶対回転角度を示す信号を出力可能なレゾルバ24と、制御ユニット3とを備えている。
前記モータ20は、駆動工具25に係合したねじ部品がワークにねじ込まれた時の衝撃トルクによって生じるねじりコイルばね22のねじれ角が、ねじ部品に目標締付トルクが作用した時のねじりコイルばね22のねじれ角以下となる回転速度または出力トルクで駆動制御される。
(もっと読む)
軸力センサ付ボルト締付工具
【課題】軸力測定に要するコストを低減するとともに、軸力測定の手間を減らし、測定精度を向上させる軸力センサ付ボルト締付工具を提供する。
【解決手段】ボルト1の軸力を測定する軸力測定装置部12とボルト1と嵌合する脱着可能なソケット部13とからなる軸力センサ付ボルト締付工具10であって、軸力測定装置部12は、軸力測定装置本体部12bの一端に形成され、ボルト1と嵌合するソケット部13を取付ける取付部分を有するソケット嵌合部12cと、軸力測定装置本体部12bの内部に収容される軸力センサ11とを備え、ソケット部13は、ソケット本体部13の一端に形成され、軸力測定装置部12のソケット取付部12cと嵌合するための工具嵌合部13aと、ソケット本体部13の他端に形成され、ボルト1と嵌合させるためのボルト嵌合部13bとを備える。
(もっと読む)
自動ねじ締め機
【課題】ねじの締付け時における衝撃トルクの発生の有無・大きさを正確に検出することができる自動ねじ締め機の提供。
【解決手段】本発明は、ACサーボモータ30の駆動を受けて回転するドライバビット31と、このドライバビット31に作用するねじの締付トルクに応じた原トルク信号を発するトルクセンサとを備える。トルクセンサの発する原トルク信号は、それぞれ異なる遮断周波数に設定された複数のフィルタを通される。この結果、異なる周波数成分で構成された複数のトルク信号を得ることができ、このトルク信号またはこれから得られるトルク値を、これらの乖離率等を用いて比較することにより、衝撃トルクの発生の有無を判別することができる。
(もっと読む)
トルクレンチ
【課題】 副目盛を読み取り易くして副目盛のトルク値合わせを容易化し、また調整リングを悪戯しても回し難くして、設定トルク値を勝手に変更できないようにする。
【解決手段】 締め付けトルク設定用の調整ネジ1の回転操作で主目盛2a付きのスライド部2を、軸方向Dに沿ってグリップ3内で移動自在に形成する。調整ネジ1の操作端部1aに、調整ネジ1と一体状に回転する調整リング8を同心状に外装する。この調整リング8の外周面8bに、副目盛8cを付す。上記の調整リング8を、グリップ3の基端3aから露出する。この調整リング8の外周面8bを、グリップ3の軸方向Dに沿って手前側に向かってテーパーに形成する。
(もっと読む)
ナットランナ及びその制御方法
【課題】 締め付け開始から着座までの締め付け時、締め付けトルクが所定値でなかったり、あるいは変動するような締め付け対象物について、締め付け開始から着座を経て締め付け完了に至るまで確実な締め付けを達成する。
【解決手段】 締め付け開始から着座まで締め付け対象物を高速回転で締め付け、その着座後から締め付け完了まで前記締め付け対象物を低速回転で締め付けるナットランナの制御方法であって、前記締め付け対象物の締め付け開始から着座までの間での締め付けトルクTが、予め設定された上限値THと下限値TLの判定領域A内にあるか否かを判定する。
(もっと読む)
トルクレンチ
【課題】 握り部に対する手の掛かりを良くし、握力のない人でも容易に旋回操作でき、また滑り止め加工の手間暇を軽減でき、使い勝手が良くなるようにする。
【解決手段】 扁平形の中空状軸部1の基端側に握り部2を設け、この握り部2内に、トルク設定用のコイルバネ3を、その弾発方向を握り部2の長手方向に合わせて設ける。握り部2を、軸部1と扁平状の面2aの向きを合わせて扁平に形成する。コイルバネ3を、握り部2の幅広状の横幅方向に並べて平行状に複数設ける。
(もっと読む)
締結装置
【課題】六角穴付きボルトを把持するチャックを備えるとともに、ボルトのサイズに応じたソケットと系合して着脱自在とし、産業用ロボットと組み合わせることで、作業範囲が広いねじ締め装置を提供する。
【解決手段】 締結部品の締付け手段を着脱し、複数の異なる種類の締結部品が単一のナットランナ201で締付けられる締結装置において、前記締付け手段を前記締付け手段の回転軸方向に直線移動させる第1駆動手段と、前記締結部品を把持するチャック208と、前記チャックを駆動する第2駆動手段と、を備える。
(もっと読む)
締付工具
【課題】簡易な手段により、締結部材を所定の締付トルクで締め付けることができる締付工具を提供する。
【解決手段】入力側凹部526と出力側凹部612との間に鋼球7を挟持させ、さらにコイルスプリング8により入力クラッチ板522を出力クラッチ板61側に付勢させる。これにより、入力シャフト5と出力シャフト6の係合が保たれる。そして、出力シャフト6に作用する締付トルクが所定値に達すると、コイルスプリング8はさらに圧縮される。そうすると、入力クラッチ板522が出力クラッチ板61から相対的に離反する方向へ移動する。すなわち、鋼球7が入力側凹部526および出力側凹部612の少なくとも一方から脱出して、入力シャフト5と出力シャフト6との係合が解除される。さらに、出力側軸62の端側に取り付けられているソケット626が締結部材から離反する方向へ移動する。
(もっと読む)
制御された大きさのトルクを加える装置
【課題】ねじ連結式装置を取り付けたり取り外したりするためのトルク装置を提供すること。
【解決手段】本発明の装置は、内部キャビティを構成するヘッドと、少なくとも1つの板ばね要素を含み第1部分と第1部分に対して折り曲げられた第2部分とを有する板ばね120と、ヘッドのキャビティ内に配置され、一体の駆動インサートを含み、径方向に延びる複数の駆動歯を有し、駆動歯が、一方向の傾斜側部と反対方向の平らな側部とを構成する非対称な側部を有し、一の回転方向において板ばね要素に係合して予め設定されたトルクの限度を一回転方向において定めるよう位置決めされているロータ130と、1つの板ばね要素とロータ駆動歯との間のインターフェースによって構成され、トルク限度を超えると、板ばね要素が滑ってロータ駆動歯を通り越すトルク制御機構とを備えている。
(もっと読む)
樹脂製ねじの締め付け管理システム
【課題】精度良くファイナルトルク値のばらつきを抑制でき、且つ、ねじの締め付け異常を容易に認知できる樹脂製ねじの締め付け管理システムを提供する。
【解決手段】樹脂製のタンク本体1に対してねじ式のキャップ3を締め付け装置11で締め付けるにあたり、締め付けの途中段階において、締め付けトルク値が中間設定トルク値に達したことを検出する中間設定トルク値検出手段18と、中間設定トルク値検出手段18による検出時以降のキャップ3の回転角度を検出する回転角度検出手段19と、回転角度検出手段19により検出されるキャップ3の回転角度が予め設定した設定回転角度と一致したときに、キャップ3の回転を停止させる回転停止手段20と、中間設定トルク値に達する前の段階における締め付けトルク値の所定の上昇幅に要したキャップ3の回転角度を監視する監視手段21と、を備える管理システムとした。
(もっと読む)
121 - 140 / 154
[ Back to top ]