
Fターム[3C269CC09]の内容
数値制御 (19,287) | 被制御軸の種類、形状 (1,508) | 多関節軸 (377)
Fターム[3C269CC09]の下位に属するFターム
腕の長さが可変であるもの (7)
Fターム[3C269CC09]に分類される特許
121 - 140 / 370
レーザー加工表示装置及びこれを用いたロボットの教示方法
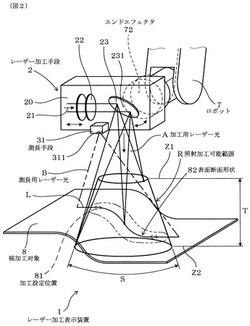
【課題】レーザー加工の教示作業を迅速に行うことができるレーザー加工表示装置及びこれに用いたロボットの教示方法を提供すること。
【解決手段】レーザー加工表示装置1は、ロボット7のエンドエフェクタ72に装着して加工用レーザー光Aを照射するレーザー加工手段2と、被加工対象8に測長用レーザー光Bを照射して、測長用レーザー光Bの出射位置311から被加工対象8までの距離を計測する測長手段31と、加工用レーザー光Aの出射位置231から被加工対象8における各部までの距離を算出し、被加工対象8の表面断面形状を特定する算出手段と、表面断面形状82を表示すると共に、表面断面形状における各部が加工用レーザー光Aの焦点距離の調整可能範囲T内に入るか否かを表示する表示手段を備えている。
(もっと読む)
学習制御ロボット

【課題】本発明は、学習制御機能を持つロボットの学習稼動の動作中、もしくは学習後の実稼動の動作中に例外処理が起きた場合に対処可能な学習制御ロボット及び再学習可能な学習制御ロボットを提供することを目的とする。
【解決手段】本発明の学習制御ロボットは、ロボット機構部と、作業プログラムを実行することにより、ロボット機構部の位置偏差に関するデータを取得して、ロボット機構部の位置偏差を所定の値以下とするための学習補正量を計算する学習制御を実行する学習制御部と、学習制御の実行中に、データを取得するためにロボット機構部の学習稼動を実行し、学習制御の実行後に、学習制御部が計算した学習補正量に基づいて、ロボット機構部の実稼動を実行する通常制御部と、学習稼動の実行中又は実稼動の実行中において例外処理が起きた場合に、例外対処を実行する例外対処部と、を有することを特徴とする。
(もっと読む)
自動位置ずれ補正方法、及び自動位置教示方法。
【課題】
フィンガ部が水平面内で回転方向にずれて取り付けられていても、最適な位置教示データが自動で取得できる位置教示方法を提供する。フィンガ部の位置ずれ量を検出して、このずれ量を補正して、最適な位置に被搬送物を搬送できる位置教示方法を提供する。
【解決手段】
搬送ロボットが移動可能なX軸方向に対し平行に備えられた第1、第2の目的物を検出することで搬送ロボットの中心位置を特定し、その後、第3の目的物を検出する。これらの動作で得られた位置データから最適な搬送位置を自動で教示する。
(もっと読む)
教示点補正装置及び教示点補正方法
【課題】対象ワークの設置誤差に加えて形状誤差をも考慮した上で、作業ロボットの教示点を補正することのできる教示点補正装置及び教示点補正方法を提供する。
【解決手段】作業ロボット1に予め設定された基準教示点を、作業対象となる対象ワーク30bの状況に応じて補正する教示点補正装置である。教示点補正装置は、基準ワーク30a及び対象ワーク30bに設定された特徴点の位置と、基準ワーク30a及び対象ワーク30bの断面形状との計測が可能な2次元変位センサ3と、基準ワーク30aの特徴点の位置と対象ワーク30bの特徴点の位置とを比較することによって対象ワーク30bの設置誤差を演算すると共に、基準ワーク30aの断面形状と対象ワーク30bの断面形状とを比較することによって対象ワーク30bの形状誤差を演算する演算部5と、設置誤差及び形状誤差に基づいて基準教示点を補正する補正部6と、を備えている。
(もっと読む)
ロボットのキャリブレーション方法及びロボット用キャリブレーション装置
【課題】ロボットの作業効率、運用効率の低下等を招くことなくキャリブレーションの簡易な実行を可能にするロボットのキャリブレーション方法、及び該キャリブレーション方法の実施に用いられるロボット用キャリブレーション装置を提供する。
【解決手段】ロボットのキャリブレーション方法では、スカラーロボット11に対する相対位置の固定された治具12に対してその座標系の基準位置を示す位置確認孔43A,43Bを予め設けておき、スカラーロボット11の先端部に取り付けられた画像認識用のカメラ33により前記位置確認孔43A,43Bを認識するとともに、該認識された位置確認孔43A,43Bの位置に基づいてスカラーロボット11の先端部の座標系を調整するキャリブレーションを行なう。
(もっと読む)
学習制御機能を備えたロボット
【課題】大部分の現場において、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部と、ロボット機構部の動作を制御する制御装置とを含むロボットであって、制御装置は、ロボット機構部の動作を制御する通常制御部と、作業プログラムによりロボット機構部を動作させて、センサによって検出した前記ロボット機構部の制御対象位置を通常制御部に与えられた目標軌跡もしくは位置に近づけるために学習補正量を算出する学習を行う学習制御部と、を有し、学習制御部は、学習稼動状態で設定可能な最大速度オーバライドを算出し、最大速度オーバライドに至るまで複数回に渡って速度オーバライドを増加させながら学習補正量を算出する学習を行うことを特徴とする。
(もっと読む)
作業マニピュレータのセンシング動作生成方法、センシング動作生成装置及びセンシング動作生成プログラム
【課題】実際の作業ワーク情報と教示データとの誤差が大きい場合でも、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する。作業マニピュレータ2の接触式センサ3が作業ワークWに接触するセンシング姿勢Sにおいて、接触式センサ3が接触する作業ワークWの接触面Tを抽出すると共に、この接触面Tを構成する一つのエッジEを選択し、選択された一つのエッジEの位置と、接触式センサ3の基端3b側に設定した設定位置6を接触面Tに射影した位置WPとが一致するように、作業マニピュレータ2のセンシング姿勢Sを再設定し、再設定されたセンシング姿勢Sを含むように作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
無線伝送装置とそれを用いたロボットの振動抑制制御装置およびロボット制御装置
【課題】無線化した加速度センサをロボットに取り付ける場合、センサを用いた振動抑制の効果を向上できるとともにセンサ基板における消費電力が低減できるようにする。
【解決手段】センサ信号の主成分の振動パラメータ(周波数、振幅、位相)を得る信号解析装置と、該パラメータからセンサ信号の近似波形を生成する信号発生器81を備えて、該パラメータが変更された場合のみパラメータの無線伝送を行う。得られる近似波形から各軸モータの速度を求め、シミュレーションによりロボット動作に基づくモータ速度を得て、モータ速度の差をモータ速度の振動成分とする。モータ速度の振動成分をモータの位置−速度制御ループにフィードバックしてロボットアームに発生する振動を抑制する。
(もっと読む)
軌道計画方法、軌道計画システム及びロボット
【課題】計算コストを抑えながら状態空間の探索に制約が生じることのない軌道計画方法及び軌道計画システムを提供する。
【解決手段】物体の状態を状態空間において探索木の根として定め、所定の時間間隔における力学的な関係から時間経過した後の該物体の次の状態を状態空間において探索木の枝として定める探索木作成部101を備える。さらに既知状態登録木を記憶する既知状態登録木記憶部105と、予め区分された状態空間の複数のセルから次の状態が属するセルを定め、該セルに属する状態が既知状態登録木の枝としてすでに登録されているかどうか判断し、登録されている場合に次の状態を破棄し、そうでない場合に次の状態を該既知状態登録木の枝として登録する既知状態登録木作成部103と、を備える。既知状態登録木の枝として登録された状態の中から目標状態までの距離がもっとも小さい状態を選択し、その状態から軌道を求める軌道作成部107を備える。
(もっと読む)
ロボットの姿勢判定方法
【課題】簡易な演算により、ロボットの姿勢を判定するロボットの姿勢判定方法を提供する。
【解決手段】ワークに想定される誤差Δpにともなうエンドエフェクタの位置の変化を位置変化量Δr、誤差Δpにともなうマニピュレータにおける各軸の変化量を姿勢変化量Δq、誤差Δpが存在しないときのマニピュレータの各軸の値をqiとし、このqiにおけるヤコビアンをJv(qi)とすると、姿勢変化量Δqを、Δqi=Jv(qi)-1Δrにより算出する。そして、誤差Δpが最大となるときのマニピュレータの各軸の変化量を変化量Δqimaxとし、関節の回転角度限界をqmaxとすると、qi+Δqimax≦qmaxを満たすマニピュレータの各軸の値qiを誤差Δpを有するワークに対し当該作業点iにおける作業が可能な姿勢であると判定する。
(もっと読む)
ロボットシミュレータ
【課題】ロボットとワークとの位置関係に変化が生じることを前提に、位置関係に変化が生じてもロボットの姿勢が動作可能な領域であるか否かを簡単な処理で判定する。
【解決手段】設置位置判定部67は、ワークに想定される誤差Δpに対応するエンドエフェクタの位置変化量Δrから、線形に近似された演算式を用いてマニピュレータの姿勢変化量Δqiを算出している。すなわち、設置位置判定部67は、演算部52にとって処理が容易な線形式を利用してロボットが作業可能な範囲であるか否かを判定する。
(もっと読む)
ロボット制御装置およびロボット制御装置の制御方法
【課題】待機時のアーム等の落下を防止しつつ待機時の産業用ロボットの消費電力を低減することが可能で、かつ、産業用ロボットのスループットを向上させることが可能なロボット制御装置を提供する。
【解決手段】ロボット制御装置15は、産業用ロボットを駆動するためのモータ17と、モータ17を制動するための制動手段18と、モータ17を駆動するモータ駆動手段20と、モータ駆動手段20に電力を供給する電力供給手段21と、制動手段18、モータ駆動手段20および電力供給手段21を制御する制御手段22とを備えている。制御手段22は、制動手段18を作動させてモータ17を停止させるとともに、制動手段18の作動中に電力供給手段21を制御してモータ駆動手段20に電力を供給しながらモータ駆動手段20を制御してモータ17への電流の供給を停止する。
(もっと読む)
ロボットのキャリブレーション方法および装置
【課題】作業者の熟練度に依存することなく、高い精度で治具とロボットのTCPのキャリブレーションを行うことができるロボットのキャリブレーション方法および装置を提供する。
【解決手段】ツール12と、該ツールとワークとの接触を検出するセンサ14と、6自由度に数値制御可能なロボット18と、センサ計測値やツール接触時のロボット位置姿勢を記憶しロボットを制御する制御装置20と、ツールの作動範囲内に固定され互いに直交もしくは既知の角度で交差する3平面を有する治具22を備える。制御装置20により、3平面22a,22b,22cにツール12を接触させ各接触点の3次元座標を記憶するタッチセンシング工程と、3平面が交差する点を原点とする座標系を補正する座標系設定工程と、ロボット手先フランジ面16に対するツール12の基準位置を算出するツールパラメータ設定工程と、から構成されるシーケンスを実施する。
(もっと読む)
ロボット装置用の制御プログラムを試験するための試験装置
本発明は、実際のロボット装置用の、具体的には、複数のロボット制御部(2.1〜2.n)を有する塗装装置用の制御プログラムを試験する試験装置に関連する。それらはそれぞれ制御プログラムを含み、実際のロボット装置におけるロボット制御部(2.1〜2.n)と、制御ユニット(4)が制御プログラムを含み、実際のロボット装置における制御ユニット(4)に相当するロボット制御部(2.1〜2.n)を調節するための少なくとも1つの制御ユニット(4)とに相当し、ロボット制御部(2.1〜2.n)をお互いに接続する、および/または、制御ユニット(4)に接続する第一のデータバス(3)も有し、第一のデータバス(3)は実際のロボット装置におけるデータバスに相当する。試験装置が、第一のデータバス(3)に接続され、かつ、実際のロボット装置の周辺機器部品をシミュレーションするモデリングデバイス(9)をも有し、そのため制御プログラムは周辺機器部品なしで試験され得る。本発明はまた、好適な試験方法をも含む。 (もっと読む)
端材の管理方法および管理システム
【課題】切断装置の準備作業による占有時間の減少、大量の端材の一括準備作業による作業効率の向上、作業者のスケジュール調整を無くしての人的コスト低減、及び歩留まりを向上させる端材の管理方法および管理システムを提供する。
【解決手段】1または複数の切断装置によって生成された端材が切断装置から取り外され、端材置き場に格納される。格納されていた端材にマーカが付与され、撮像手段によって撮像され、切断すべき製品を示す図形が割り当てられた後に、端材が切断装置に据え付けられる。さらに、当該端材が撮像され、機械座標系における切断すべき製品を示す図形の位置のデータが取得され、制御手段の指示に従って、機械座標系における切断すべき製品を示す図形の位置のデータに基づき、この製品を示す図形が割り当てられた端材から製品が切断される。
(もっと読む)
7軸多関節ロボットの制御方法及び制御プログラム
【課題】手首の位置を移動する際に7軸多関節ロボットの形態の急激な変化を抑制する。
【解決手段】7つの回転軸のうちのいずれか1つを冗長軸に、残りの回転軸のうちの3つを基軸に、かつ3つの基軸のうちのいずれか1つを変数軸に定め、かつ、基端から前記手首までの直線距離と基端に最も近い回転軸の延在方向における基端から手首までの距離とに基づく手首の位置と前記変数軸の関節角とに関して定式化された4次方程式を解いて手首の位置を3つの基軸の関節角に逆変換するステップを含み、電源オン時に、7軸多関節ロボットの初期形態に基づいて4つの第1求解演算式のうちいずれか1つを特定して記憶し、 電源オンの後、記憶した1つの第1求解演算式を用いて逆変換するステップを遂行して手首の目標位置から3つの基軸の関節角を算定し、それにより、7軸多関節ロボットの動作を制御する。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
ロボット同期化装置及びその方法
【課題】ロボット同期化装置及びその方法を提供する。
【解決手段】本発明の一実施形態によるロボット同期化装置は、仮想ロボットを操作する命令を入力され、入力された操作命令に基づいて、実機ロボットの物理的なモデル及び動作が定義されたデータを基に仮想ロボットの動作をモデリングし、モデリングされた仮想ロボットを出力する。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
ロボットの教示装置、及びロボットの制御装置
【課題】部品の種別毎に必要であったロボットの動作範囲や力覚センサ出力の許容範囲に関する作業者の初期設定作業を省略することができ、作業者による教示作業の負担を軽減させることができるロボットの教示装置、及びロボットの制御装置を提供する。
【解決手段】経路教示系127は、被組付ワーク150への組み付けが完了した状態の組付ワーク140をロボットハンド102に把持させ、組付ワーク140に過大な力が作用しないロボットハンド102の位置姿勢を探索しながら、ロボットハンド102に組付ワーク140の引抜動作を実行させる。経路教示系127は、その引抜動作の際に、ロボットハンド102の引抜移動経路を取得する。経路教示系127は、取得した引抜移動経路を時系列逆順に辿る経路を、組付作業経路として生成し、その生成した組付作業経路を動作制御部121に教示する。
(もっと読む)
121 - 140 / 370
[ Back to top ]