
Fターム[3D041AA00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475)
Fターム[3D041AA00]の下位に属するFターム
振動防止 (121)
耐久性向上 (142)
小型軽量化 (28)
構造簡素化 (54)
駆動装置間の単なる連動、自動化 (68)
公害対策 (80)
省燃費 (382)
始動性の向上 (92)
発進性の向上 (141)
走行性の向上 (1,351)
追従走行 (319)
駐停車性の向上 (98)
スリップ防止 (310)
変速性の向上 (387)
クラッチ性能向上 (138)
エンジン性能の向上 (53)
ブレーキ性能向上 (160)
制御の安定性、応答性の向上 (443)
安全性、フェイルセイフ (931)
Fターム[3D041AA00]に分類される特許
121 - 140 / 177
車両挙動制御装置
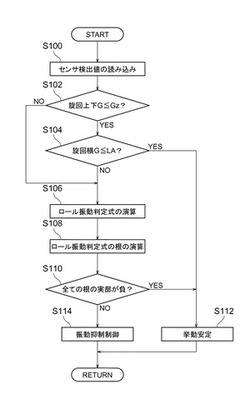
【課題】簡易な制御でロール振動の発生を効果的に抑制できる車両挙動制御装置を提供する。
【解決手段】車両挙動制御装置1では、車両のロール角、ヨー角、横力、上下変位に基づいて車両におけるロール振動の発生の有無を判断し、ロール振動の発生を検出した場合、内輪の横力Finよりも外輪の横力Foutを減少させる。これにより、車両と路面との横方向μが低下し、車両の横滑りが生じるため、ロール振動時に車両の外輪側で発生する上下方向の運動エネルギーを、車両が旋回外側にシフトする方向の運動エネルギーに変換することが可能となり、ロール振動が効果的に抑制される。また、横力の制御にあたり、普及率の高まっているVSC制御部10による各車輪のブレーキ圧制御を用いることで、高い応答性を確保しつつ、制御手段の複雑化を回避できる。
(もっと読む)
車両用走行装置

【課題】車両の最適な走行経路を設定すること。
【解決手段】車両用走行装置10は、車両に搭載され、車両が進行する路面状態を検出する路面状態検出手段1、2と、目標とする目標位置までの走行経路を設定する経路設定手段3と、車両の特性を記憶する車両特性記憶手段4と、を備えている。経路設定手段3は、路面状態検出手段1、2により検出された路面状態と、車両特性記憶手段4により記憶された車両の特性と、に基づいて、走行経路S1、S2を設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】挙動安定制御が適用されるハイブリッド車両の低コスト化を達成する。
【解決手段】ハイブリッド車両には、駆動源としてのエンジンおよびモータジェネレータを備えたパワーユニットが搭載される。制動時に車輪のスリップを抑制するアンチロックブレーキ制御や、加速時に車輪のスリップを抑制するトラクション制御が実行される場合には、モータジェネレータのモータトルクがゼロに制御される(ステップS4)。また、車両に作用するヨーモーメントを打ち消すビークルダイナミックス制御が実行される場合であっても、パワーユニットに対するトルクダウン要求がある場合(ステップS6)には、モータジェネレータのモータトルクがゼロに制御される(ステップS4)。これにより、エンジンのみを制御してパワーユニットからの駆動トルクを制御することができるため、挙動安定制御の簡素化を図るとともにハイブリッド車両の低コスト化を図ることができる。
(もっと読む)
車線逸脱防止装置
【課題】自車両が走行車線から逸脱する可能性があると判断されたとき、これが運転者による意図的なものであるか否かを正確に判断して、逸脱回避方向への進路修正を的確に行う。
【解決手段】運転者が方向指示器を操作することなく、自車両が走行車線から逸脱する可能性があると判断されるときに、逸脱回避方向の目標ヨーモーメントMs0を算出し(ステップS31)、次に、アクセル操作に連動したスロットル開度Aに応じたアクセル感応ゲインkaを算出し(ステップS53)、このアクセル感応ゲインkaに応じて目標ヨーモーメントMs0を補正する(ステップS54)。
(もっと読む)
車両用走行制御装置
【課題】自車両前方の物体との相対位置関係に基づいて自車両の走行を制御する走行制御手段を備えた車両において、自車両前方の物体を認識するセンサに検出範囲が変化する衝撃が加わった場合に、安全走行を確保する。
【解決手段】衝突回避判断手段の判断結果に基づいて自車両を自動制動制御する自動制動制御の終了後、衝突回避判断手段が衝突回避不可能と判断した結果に基づいて、自動制動制御手段による自動制動制御、又は走行制御手段による走行制御が作動され難くなるように作動条件を変更する。
(もっと読む)
車両の横転防止及び警告システムのための予測横荷重伝達比の特定方法
一定時間にわたって車両運動因子を測定することによって車両の予測横荷重伝達比を決定し、この予測横荷重伝達比に基づいて車両の運転を制御するステップを含む車両の安定性制御方法。 (もっと読む)
車両用運転支援装置
【課題】運転者の運転操作に影響を及ぼす心身状態に応じた適切な運転支援を行う車両用運転支援装置を提供することを目的とする。
【解決手段】制御部20において、車両搭載装置50のGPS車載器54から車両の前方にある交差点までの距離をし、その距離が小さければ危険度が大きく、距離が小さければ危険度は小さいとして危険度を決定する。また、室内カメラ12から入力した運転者のまぶたの動きから運転操作に影響を及ぼすような運転者の状態を推定する。さらに、GPS車載器54から走行履歴を取得して走行履歴記録装置18に記録する。そして、走行履歴及び運転者の心身の状態から、危険度に応じて、車両搭載装置50の表示装置56や音声出力部58で運転支援のための告知を行ったり、車両走行装置30のブレーキ制御装置34、エンジン制御装置36、ステアリング制御装置38で運転制御支援を行う。
(もっと読む)
動力伝達装置およびこれを搭載する自動車並びに動力伝達装置の制御方法
【課題】アクセルオフによる走行中のダウンシフト操作時にエネルギ効率の向上と運転フィーリングの向上とを図る。
【解決手段】エンジン22をクラッチC1を介して第1変速機30の入力軸31に接続すると共にクラッチC2を介して第2変速機40の入力軸41に接続し、モータ50を第2変速機40の入力軸41に接続したハイブリッド自動車20において、アクセルオフによる走行中にシフトレバー81がダウンシフト操作されたとき、エンジン22と駆動軸62とを連結する変速機の変速段をそのまま維持すると共にダウンシフトしたと仮定したときのエンジンブレーキトルクの増加分が応答性の良いモータ50の回生制御を用いて駆動軸62に出力されるようモータ50を制御する。これにより、ダウンシフト操作時のエネルギ効率の向上と運転フィーリングの向上とを図ることができる。
(もっと読む)
監視装置および方法、記録媒体、並びに、プログラム
【課題】ドライバにとって眩しい状態を正確に検出する。
【解決手段】視線方向検出部122は、室内監視カメラ111により撮像されたドライバの顔の画像をトラッキング部121によりトラッキングした結果に基づいて、ドライバの視線の向きを検出する。照明光眩しさ検出部125は、検出されたドライバの視線の向きに基づいて、前方監視カメラ112により撮像された車両の前方の画像から、ドライバの視野の中心を中心とする所定の範囲の領域が写っている視界画像を抽出し、視界画像の輝度に基づいて、ドライバの目に強い光が照射されている状態を検出する。本発明は、運転支援装置に適用できる。
(もっと読む)
車両用運転操作補助装置
【課題】運転者の操作を将来の走行環境に応じて適切にアシストできるような車両用運転操作補助装置を提供する。
【解決手段】レーザレーダ10,前方カメラ20,後側方カメラ21および車速センサ30によって、車両状態および車両周囲の走行環境を検出する。コントローラ20は、検出された車両状態、走行環境から、車両もしくは車両周囲の走行環境の将来を予測し、将来において必要な運転操作量、例えば操舵反力を推定する。操舵反力制御装置60は、必要な操舵反力となるようにサーボモータ61を制御し、運転者の操作を補助する。
(もっと読む)
ハイブリッド車両のモード切り替え制御装置
【課題】ハイブリッド(HEV)モードから電気走行(EV)モードへの切り換えを、難なくエンジン停止ショックなしに行わせ得るモード切り替え制御を提案する。
【解決手段】アクセル開度APOの低下でt1に4→5アップシフト指令が、t2にHEV→EVモード切り換え指令が発せられる。t1にダイレクトクラッチD/Cの指令圧tPc2を0にし、実圧Pc2の低下によりD/Cを解放させ、自動変速機を中立状態にする。t2からTM1時間が経過するt4に、第1クラッチの指令圧tPc1を最大値にし、実圧Pc1の上昇により第1クラッチを解放させると共に、t2からTM2時間が経過するt5より、エンジントルクTeをフューエルカットにより低下させてエンジンを停止(Ne=0)させることでモード切り替えを行わせる。フロントブレーキFr/Bの指令圧tPcをt5にプリチャージ圧とし、モータ/ジェネレータの変速用回転合わせ制御終了時t8に最大値とし、実圧Pcの上昇によりFr/Bを締結させて4→5アップシフトを行わせる。
(もっと読む)
回避操作算出装置、回避制御装置、各装置を備える車両、回避操作算出方法および回避制御方法
【課題】自車両のタイヤのグリップ力の最大値を超える力を車両に作用させることなく、制動制御および操舵制御により自車両が障害物を回避することができる運転操作量を算出する回避操作算出装置を提供する。
【解決手段】本発明の回避操作算出装置10は、車両12よりも前方の道路13上に存在する障害物14を検出する障害物検出手段と、車両12の走行状態を検出する自車情報検出手段と、該自車情報検出手段および前記障害物検出手段からの検出情報に基づいて車両12が障害物14を回避するための回避操作量を生成する回避操作量生成手段30とを備える。回避操作量生成手段30は、車両12に生じる加速力、減速力および横力の合成力が車両12のタイヤ33のグリップ力の最大値よりも小さくなる範囲内で回避操作量を算出する。
(もっと読む)
車両の走行制御装置及び走行制御方法
【課題】ナビゲーション装置と自動加速/減速機能とを備えた車両のカーブ走行時の減速運転を利用して、弱っているバッテリを回復させる。
【解決手段】ナビゲーション装置と自動加速/減速機能とを備えた車両において、ナビゲーション装置が持つ地図情報に含まれるカーブ情報から、走行中の車両前方に減速すべきカーブが存在するか否かを検出し、存在する場合に、車両状況及び車両の外部環境を検出し、カーブ情報から車両のカーブ走行時の目標車速を算出して算出車速と現在の車速との偏差から車両のカーブ進入時の減速量を算出し、運転環境検出部が検出したバッテリ状態に応じて、減速量を達成する車両の減速開始地点を算出する車両の走行制御装置である。バッテリが弱っている時にカーブ通過時の減速運転時間を長くしてバッテリの充電量を増大させる。
(もっと読む)
車両用操舵装置
【課題】操舵装置の異常時においても車両の適切な移動を可能とする。
【解決手段】ステアリングホイール15の操作は、トルクセンサ21および操舵角センサ22によって検出され、これらの出力は車内LAN25に送出される。パワーステアリング用コントローラ20は、トルクセンサ21および操舵角センサ22ならびに車速センサ23の出力信号に基づいて、操舵補助力発生用の電動モータ16を制御する。電子制御型差動装置3は、差動装置用コントローラ6によって制御され、左右前輪5L,5Rへの駆動力の配分を制御する。パワーステアリング用コントローラ20は、操舵装置10に異常が生じると、そのことを車内LAN25を介して差動装置用コントローラ6に通知する。この通知を受けて、差動装置用コントローラ6は、トルクセンサ21または操舵角センサ22の出力に基づき、駆動力の配分を制御することにより、車両を旋回させる。
(もっと読む)
車両の衝突安全制御装置
【課題】安全なブレーキ制動を確保したうえで、衝突不可避時の制動距離を従来のものより縮めることができ、より安全な衝突安全制御を行う衝突安全制御装置を提供する。
【解決手段】衝突判断によるの制動動作に併せて車高を上昇させていく車高調整制御を行うことにより、制動に適切な輪荷重を確保して減速度を高める。
(もっと読む)
車両の駆動力制御装置
【課題】車両の駆動状態を制御することでクラッチ制御をオフとした後のクラッチの締結ロック状態を回避できる車両の駆動力制御装置を提供する。
【解決手段】モータ4と、そのモータ4で駆動される後輪3L、3Rと、モータ4から後輪3L、3Rへの動力伝達経路に介装されるクラッチ12とを備えた車両の駆動力制御装置である。上記クラッチ12は、電磁クラッチ106を操作することによる制御によってメカニカル機構でクラッチの接続・切断が行われる。そして、上記電磁クラッチ106によって外輪部材101に保持器104を固定状態の間中、上記モータ側の回転軸の加速度が車輪側回転軸の加速度以上の加速度状態となるようにモータ4の出力トルクの下限値を制御する。
(もっと読む)
車両用運転操作補助装置およびその装置を備える車両
【課題】先行車が検出されなくなった場合に運転者に違和感を与えないような車両用運転操作補助装置を提供する。
【解決手段】自車両周囲に存在する障害物を検出する障害物検出手段10,20と、障害物検出手段10,20からの信号に基づいて、自車両の障害物に対するリスクポテンシャルを算出するリスクポテンシャル算出手段50と、リスクポテンシャル算出手段50からの信号に基づいて、予め設定した変化パターンに従い、車両操作機器に発生させる操作反力を決定する操作反力決定手段50と、操作反力決定手段50からの信号に基づいて、車両操作機器に操作反力を発生させる操作反力発生手段50とを有する。さらに、障害物検出手段10,20によって検出されていた障害物が対象外となった場合に、変化パターンを補正する操作反力補正手段50を備える。
(もっと読む)
車両用運転操作補助装置
【課題】運転者による前後方向および左右方向の運転操作を適切にアシストすることができる車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置1は、自車両の周囲に存在する障害物を検出する障害物検出手段10,20,21,30と、障害物検出手段10,20,21,30による検出状況に基づいて、自車両に対する障害物の存在方向、相対距離および相対速度をそれぞれ検出する障害物認識手段50と、障害物認識手段50からの信号に基づいて、自車両の障害物に対するリスク度を算出するリスク度判定手段50と、リスク度判定手段50からの信号に基づいて、運転者による自車両の前後運動および左右運動に関わる運転操作を促すように、車両機器の作動を制御する車両機器操作量制御手段60,80,90と、車両機器操作量制御手段60,80,90における前後方向の制御量および左右方向の制御量の配分をそれぞれ調整する配分調整手段50とを有する。
(もっと読む)
車両の駆動力配分装置
【課題】前輪、左後輪、右後輪を独立に駆動する車両において目標車両挙動を実現する。
【解決手段】コントローラ8は、車両の車両前後方向力、ヨーモーメントの目標値を決定し、前輪1、2、左後輪3、右後輪4それぞれの駆動力配分の基本値を設定し、駆動力配分の基本値によって実現する車両前後方向力、ヨーモーメントを演算し、車両前後方向力、ヨーモーメントの目標値と駆動力配分の基本値によって実現する車両前後方向力、ヨーモーメントとの誤差を演算する。そして、誤差を小さくする各輪の駆動力配分の補正量を演算し、前輪1、2、左後輪3、右後輪4それぞれの駆動力配分の目標値をそれぞれ駆動力配分の基本値と駆動力配分の補正量との和に設定し、駆動力配分の目標値に従って前輪1、2、左後輪3、右後輪4それぞれの駆動力を独立に制御する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した加減速が行われることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との余裕時間に基づいて自車両のリスクポテンシャルを算出し、リスクポテンシャルが大きいほどアクセルペダルを操作するときに発生する操作反力を増大させる。またリスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに制動力を増大させる。リスクポテンシャルに応じた制駆動力制御を行う場合に、加速意図の場合は加速抑制までを許可し、一定意図の場合はエンブレまでを許可し、エンブレ意図の場合は緩減速制御までを許可し、緩減速意図の場合は減速制御までを許可し、減速意図の場合は運転者のブレーキペダル操作と制動制御との加算処理までを許可するように、制駆動力制御の作動スケジュールを変更する。
(もっと読む)
121 - 140 / 177
[ Back to top ]