
Fターム[3D041AA00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475)
Fターム[3D041AA00]の下位に属するFターム
振動防止 (121)
耐久性向上 (142)
小型軽量化 (28)
構造簡素化 (54)
駆動装置間の単なる連動、自動化 (68)
公害対策 (80)
省燃費 (382)
始動性の向上 (92)
発進性の向上 (141)
走行性の向上 (1,351)
追従走行 (319)
駐停車性の向上 (98)
スリップ防止 (310)
変速性の向上 (387)
クラッチ性能向上 (138)
エンジン性能の向上 (53)
ブレーキ性能向上 (160)
制御の安定性、応答性の向上 (443)
安全性、フェイルセイフ (931)
Fターム[3D041AA00]に分類される特許
41 - 60 / 177
車両運転支援装置及び車両運転支援方法
【課題】車線区分線を検出できない場合があっても、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両側方の障害物を検出すると、運転者の操舵入力に基づき所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が、上記障害物に近い側の車線区分線を基準とした判定閾値に到達若しくは当該判定閾値よりも障害物側と判定すると、側方障害物に対する支援制御の開始と判定する。但し、障害物に近い側の車線区分線を検出できない場合には、上記制御開始を判定する際に基準とする車線区分線を車線幅方向外側へ変位させる。
(もっと読む)
車両の運転支援装置

【課題】自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行う。
【解決手段】障害物を検出した場合、自車両のドライバが視認可能な第1の障害物か視認困難な第2の障害物かを判断し(S2)、各障害物の衝突リスク(ベース値)を修正し、第2の障害物の衝突リスクが第1の障害物の衝突リスクよりも大きくなるように調整する(S3)。そして、第2の障害物の衝突リスクR2を閾値Rcと比較し、R2≧Rcのときに第2の障害物に対する警報を出力する(S5)。また、R2<Rcのときには、第1の障害物の衝突リスクR1を閾値Rccと比較し、R1≧Rccの場合、衝突の危険性があると判断して自動ブレーキや回避操舵を行う(S7)ことで、自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行い、安全を確保する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動変速と手動変速とを設定するための変速設定部における設定内容を示す情報を取得し、前記変速設定部にて手動変速が設定されている場合には、前記所定区間の開始地点に到達する前に、当該加速変速比を示す案内を行う。
(もっと読む)
車両用障害物回避支援装置及び車両用障害物回避支援方法
【課題】回避操作支援の必要性の判定を精度良く実行可能として、運転者による障害物回避操作をより適切に支援できるようにする。
【解決手段】自車両が所定時間後までの間に障害物と接触することなく走行可能な自車両状態の範囲を回避可能集合として算出する。そして、現在の自車両状態と回避可能集合の境界との関係に基づいて、回避操作支援の必要性の有無の判定を行う。回避操作支援の必要性がある場合には、運転者の回避操作を支援する。
(もっと読む)
乗員保護装置
【課題】より適切な乗員保護を行うことができる乗員保護装置を提供すること。
【解決手段】本発明による乗員保護装置1は、両の乗員の意識の向上又は低下を数値で示す項目Cを検出する意識検出手段3aと、項目Cが第一閾値αにより定められる第一領域内となる場合に、乗員の覚醒を促す覚醒手段6aと、項目Cが第二閾値βにより定められる第二領域内となる場合に、車両を退避させる退避手段3b、3cと、退避手段3b、3cが作動可能であるかを判定する判定手段3dを備えるとともに、項目Cが第二領域内となる場合であって、判定手段3dが退避手段3b、3cは作動可能であると判定する場合に、覚醒手段6aによる覚醒を禁止する禁止手段3eを備えることを特徴とする。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置の誤動作を防止しつつ衝突被害軽減効果の実効を図る。
【解決手段】車両進行方向に位置する障害物までの距離L及び障害物との相対速度Vに基づいて障害物に衝突するまでの衝突時間tを演算し(S1及びS2)、衝突時間tがブレーキ作動タイミングを規定する閾値以下となったときに(S8)、ブレーキを作動させると共に燃料供給を中止する(S9)。このとき、車両運転者に加速意思があり(S3)、車両運転者により変速機がシフトダウンされてから所定時間内であり(S4)、かつ、ウインカ作動中であれば(S5)、閾値を所定値だけ小さくする(S6及びS7)。このため、加速を伴う車線変更操作が行われているとき、障害物との距離が一時的に短くなってもブレーキが急に作動することがなく、車両姿勢が変化して不安定となることや、追従する後方車両が衝突してしまうことを抑制できる。
(もっと読む)
車両の運転支援装置
【課題】実際の回避走行に沿った目標自車進路を設定して自然な運転支援を行う。
【解決手段】制御ユニット5は、対象物と自車両1との相対速度Vfと対象物の種類に応じて対象物からの横移動量Wを設定し、対象物からの横移動量Wと距離dとに基づいて目標自車進路を推定し、最大横加速度(d2y/dt2)maxを推定する。そして、最大横加速度(d2y/dt2)maxが、警報制御閾値Ca以上の場合は警報制御を行ない、ブレーキ制御閾値Cb以上の場合は警報制御を行うと共にブレーキ制御を行う。また、許容最大横加速度(d2y/dt2)max_cを設定し、許容最大横加速度(d2y/dt2)max_cと対象物からの横移動量Wと自車速Vとに基づいて限界自車進路を推定して必要横加速度(d2y/dt2)cを演算し、実横加速度(d2y/dt2)rと必要横加速度(d2y/dt2)cとに基づいて操舵制御を行う。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線Lの幅方向中央からそれぞれ幅方向左右に横変位基準位置LXL、LXRを設ける。そして少なくとも左右の横変位基準位置LXL、LXR以内に自車両が位置する場合、ヨー角偏差が小さくなるように自車両をフィードバック制御する。また、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外に自車両がいる場合、上記角度偏差および横変位偏差が小さくなるようにフィードバック制御する。
(もっと読む)
車両走行支援装置、車両、車両走行支援プログラム
【課題】車両が走行領域から逸脱することを回避する観点から車両の挙動を適当に制御することができる装置等を提供する。
【解決手段】本発明の車両走行支援装置10によれば、運転操作度合Ddが閾値TH_Dd以下となったことを要件として走行支援制御が実行される。これにより、操舵装置14および制動装置16のうち一方または両方の動作が制御されることにより、車両1が走行領域から逸脱しないように車両1の走行が支援される。
(もっと読む)
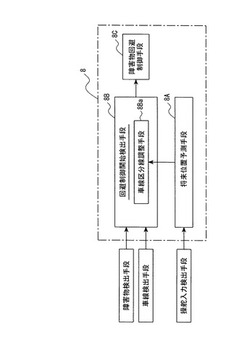
作業車両
【課題】作業車両が転倒の可能性のある溝や段差を通過する前に、作業車両の転倒を防止することができる作業車両を提供することを目的とする。
【解決手段】距離測定手段30と、警報手段40と、走行停止手段50と、制御手段60とからなる転倒防止装置20を備えたトラクタ1であって、距離測定手段30は、トラクタ1の左右両側の前部と後部とに設けられ、トラクタ1の前方及び後方の所定位置の地面の高さHを測定し、制御手段60は、距離測定手段30によって測定される前後左右の地面の高さHの値のうち少なくとも一つ以上の値が第一設定値H1以上となると、警報手段40に所定の信号を伝送して警報を発し、距離測定手段30によって測定される前後左右の地面の高さHの値のうち少なくとも一つ以上の値が第二設定値H2以上となると、警報手段40に所定の信号を伝送して警報を発し、走行停止手段50に所定の信号を伝送してトラクタ1を停止させる。
(もっと読む)
危険回避支援システム
【課題】この発明は、運転者に通常レベルの安全運転を意識させた上で、危険回避時には、運転者の意図する危険回避動作を素早く且つ確実に支援できる危険回避支援システムを提供することを課題とする。
【解決手段】危険回避支援システム1は、前方車両が急ブレーキをかけた場合など、当該車両が危険回避動作を必要とする状況に陥ったことを検知する検知部2を有する。システムの制御部10は、この検知部2を介して危険回避動作が必要であることを検知したとき、当該車両の動作モードを通常モードから最大支援モードに切り換える。
(もっと読む)
衝突回避装置
【課題】車間距離が短い場合であっても、車両間の衝突を回避することができる衝突回避装置を提供する。
【解決手段】衝突回避装置1は、衝突予測装置10と、車両跳上げ装置11と、制御装置12とから構成されている。衝突予測装置10は、他車両200との衝突を予測する装置である。車両跳上げ装置11は、自車両100を路面から跳上げる装置である。制御装置12は、通信によって他車両200との間で情報をやり取りし、衝突予測装置10が他車両200との衝突を予測したとき、他車両200の情報に基づいて自車両100を跳上げるか否かを決定し、決定結果に基づいて車両跳上げ装置11を制御する。これにより、車間距離が短い場合であっても、自車両100を跳上げ他車両200の上方を通過させることで車両間の衝突を回避することができる。
(もっと読む)
内燃機関の点火制御装置
【課題】燃料性状に応じて放電回数を制御することにより、点火プラグのくすぶりを防止するのに適した放電回数を実行できる内燃機関の点火制御装置を提供する。
【解決手段】本実施例に係るエンジンシステム200は、エンジン10の燃焼室15に供給される燃料の性状を判定する燃料性状センサ50と、燃料と吸気との混合気に点火する点火プラグ16と、燃料性状センサ50の判定結果に応じて、一回の燃焼行程中における点火プラグ16の放電回数を制御するECU100とを備えている。
(もっと読む)
車両の電力制御装置
【課題】例えば、車両が障害物を緊急に回避する緊急回避時に生じる各種アクチュエータにおける電力不足を解消する。
【解決手段】緊急回避時に各アクチュエータで必要となる電力を賄えるように、オルタネータが発電する発電量(Pg)の上限値である発電量Pg1より大きい目標発電量Pg2に発電量の上限値を設定する。オルタネータは、車両の緊急回避時において、ECUによる制御下で、目標発電量(Pg2)を上限値として発電量を一時的に増大させる。オルタネータが発電する発電量が増大することによって、オルタネータから各アクチュエータに供給される電力が増大し、各動作部分を動作させるために十分な駆動力を当該動作部分に供給可能なようにアクチュエータを駆動することが可能である。したがって、アクチュエータにおける電力不足が発生することなく、車両は緊急に障害物200を回避することが可能である。
(もっと読む)
車両用運転支援装置
【課題】本発明は、運転者に障害物との衝突を回避させるため障害物を検出した際に警報等を行なう車両用運転支援装置において、運転者の運転支援装置への依存度を、精度よく推定することができる車両用運転支援装置を提供することを目的とする。
【解決手段】判定対象物に対して運転者が衝突回避行動を開始した時の、差分距離D、差分時間TD、及び車両速度Vを検出して記憶し、この記憶された各データを時系列に並べて、差分距離Dの相関度、差分時間TDの相関度、及び車両速度Vの相関度から、運転者の運転支援装置への依存度を判定するようにしている。
(もっと読む)
障害物判定装置および方法、並びに障害物判定装置を備えた車両
【課題】対象物が車両の先端部もしくは側面に衝突する可能性を判定する。
【解決手段】車両20の前方にある物体50を撮像するカメラ101と、物体50までの距離を計測するレーダ102を用いる。そして、カメラ101を車両20の任意の位置101Vに仮想的に移動したときの方位を演算する。その方位に変化がないとき、仮想的に移動したカメラの位置101Vに物体50が衝突する可能性が大であると判定する。
(もっと読む)
車両用運転支援装置
【課題】障害物との衝突を効率よく回避することができ、信頼性の高い車両用運転支援装置を提供する。
【解決手段】障害物検出用カメラ2で障害物を検出してその障害物Bまでの距離と衝突回避に必要な横移動量とを算出する。これらと、タイヤ状態センサ3や路面μセンサ4、ブレーキ踏み量センサ10、舵角センサ11、ヨーレートセンサ12を用いて算出される最大減速度及び最大横加速度とから操舵回避限界及び制動回避限界を求める。この操舵回避限界及び制動回避限界に基づいて制動アシスト及び操舵アシストの開始タイミングを算出し、自動ブレーキアクチュエータ7と操舵アシストアクチュエータ6を効率よく組み合わせて制御する。
(もっと読む)
走行支援装置
【課題】
従来技術によれば、車両を経路誘導するための走行支援と、障害物を回避するための走行制御が両立できない、という課題がある。
【解決手段】
当該走行支援装置は、自車周辺の車線を検出する検出部と、前記自車が進行しようとする経路を前記検出部が検出した車線に基づいて判別した後に、前記経路上の障害物に基づいて前記自車が走行すべき経路を補正する補正部と、前記補正部が補正した経路と前記自車の位置関係に基づいて、当該自車を制御する。
(もっと読む)
車両のスタック脱出装置
【課題】脱出動作から反転動作への切換を適切なタイミングで実行でき、もってスタック状態から迅速且つ確実に脱出できる車両のスタック脱出装置を提供する。
【解決手段】後輪が路面の窪みにスタックしたときに、クラッチを接続して後輪を脱出方向に回転駆動する脱出動作(S8)と、クラッチを遮断して車両の自重により後輪を窪み内で反脱出方向に転動させる反転動作(S16)とを交互に繰り返しながら後輪を脱出させるスタック脱出装置において、脱出動作の実行中において、従動輪の車輪速が停車判定値未満で、且つ後輪と前輪との車輪速差がスリップ判定値以上になったときに脱出動作の終了判定を下し(S10がYes)、脱出動作から反転動作に切り換える。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、先行車が存在するのに、一瞬、自車両が車線を逸脱しそうになるような状況で、先行車が存在しないという誤った判断をすることがなく、先行車への追従性が損なわれることはなくなり、これにより、追従性精度の向上に貢献することにある。
【解決手段】車線逸脱防止制御手段から、自車両の推定走行軌跡と走行レーンとの角度情報を出力し、角度情報が設定値以上ある場合で、且つレーダから出力される結果が、前回の結果が先行する車両有りで、今回の結果が先行する車両無しの場合でも、先行車両検出手段で先行車有りと出力している。
(もっと読む)
41 - 60 / 177
[ Back to top ]