
Fターム[3D041AA00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475)
Fターム[3D041AA00]の下位に属するFターム
振動防止 (121)
耐久性向上 (142)
小型軽量化 (28)
構造簡素化 (54)
駆動装置間の単なる連動、自動化 (68)
公害対策 (80)
省燃費 (382)
始動性の向上 (92)
発進性の向上 (141)
走行性の向上 (1,351)
追従走行 (319)
駐停車性の向上 (98)
スリップ防止 (310)
変速性の向上 (387)
クラッチ性能向上 (138)
エンジン性能の向上 (53)
ブレーキ性能向上 (160)
制御の安定性、応答性の向上 (443)
安全性、フェイルセイフ (931)
Fターム[3D041AA00]に分類される特許
21 - 40 / 177
車両減速装置及び車両
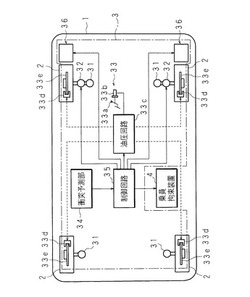
【課題】1G以上の制動性能で車両を減速させることができ、低コストで車両の衝突を予防することができる車両減速装置を提供する。
【解決手段】車両を構成する車体1及び車輪2間に設けられ、車輪2に加わる荷重に応じて、伸縮するコイルスプリングを有する懸架装置31と、車両の衝突を予測する衝突予測部34とを備え、衝突予測部34が衝突を予測した場合、車輪2の回転を制動するようにしてある車両減速装置3に、衝突予測部34が衝突を予測した場合、コイルスプリングを可逆的に伸張させる伸張装置32を備える。
(もっと読む)
運転支援システム

【課題】追従走行制御時にて車両の燃費性能を向上できる運転支援システムを提供すること。
【解決手段】この運転支援システム1は、自車と前車との車間距離を所定の目標車間距離に制御する追従走行制御ならびに自車の車速を所定の目標車速に制御する車速維持制御を行い得る。運転支援システム1は、前車の速度変動を判定する速度変動判定手段32と、先方車両の車速を取得する先方車両車速取得手段23と、自車の目標車速を再設定する目標車速再設定手段33とを備える。そして、前車の速度変動が所定の閾値よりも大きいと判定されたときに、追従走行制御が中断あるいは中止される。また、自車の目標車速が先方車両の車速に基づき再設定されて車速維持制御が行われる。
(もっと読む)
衝突軽減制御装置
【課題】この発明は、被害時に被ったエネルギを吸収して損害を抑制し、乗員への被害を軽減し、車両の挙動が不安定とならないようにすることを目的としている。
【解決手段】この発明は、衝突軽減制御装置において、衝突軽減制御手段は、予知装置により側方衝突が予知された時に、予知された衝突が発生する衝突発生側を判別し、自動ブレーキ制御装置を、ブレーキ装置が作動しない程度に遊びをなくす与圧駆動制御し、拘束制御装置がシートベルト装置に設けたモータを駆動して所定の状態までシートベルトを巻取るよう巻取り駆動制御し、サスペンション制御装置は衝突発生側とは車両上で逆側のサスペンション装置を選出した上でそれらの減衰力を衝突発生側と比較して減少させるよう減衰力低減制御し、警報装置を所定の状態で警報動作制御する、第一の段階の統合制御を実施することを特徴とする。
(もっと読む)
操舵支援装置
【課題】 運転者の意図に応じた補助操舵トルクを付与することにより、運転者に与える違和感を軽減しながらハンドル操舵に適応した操舵支援制御が行うことができる操舵支援装置を提供する。
【解決手段】 逸脱防止支援ECU10は、操舵トルクが操舵トルクしきい値を超え、制御トルクが制御トルクしきい値を超えた時間が成立判定時間しきい値を超えたときに、干渉判定を成立させて、目標制御トルクを小さくする。ここで、車両の前方に他車両が走行し、他車両と白線との距離が所定値以下であり、かつ車両の他車両に対する到達時間が所定値以下の場合に操舵トルクしきい値、制御トルクしきい値、および成立判定時間しきい値を小さくする。
(もっと読む)
目標駆動制御量設定算出装置、車両走行システム、目標駆動制御量設定方法
【課題】運転者によるアクセルペダルの操作を反映でき、ドライバビリティーの低下を抑制することができる目標駆動制御量設定算出装置、車両走行システム、目標駆動制御量設定方法を提供すること。
【解決手段】車両に作用させる駆動力を制御するパラメータである目標駆動制御量を設定する目標駆動制御量設定方法において、運転者によるアクセルペダルの操作に基づいたペダル物理量を取得し、取得されたペダル物理量に基づいてアクセルペダルの操作に基づいた駆動力変化量Δαを算出し(ST3,4)、運転者によるアクセルペダルの操作に拘わらず車両の走行状態に基づく走行状態物理量を所定値に維持するための駆動制御量である維持要求駆動力Fhを算出し、駆動力変化量Δαと、維持要求駆動力Fhとに基づいて、目標駆動力Foを算出する(ST5〜10)。
(もっと読む)
緊急退避装置
【課題】道路の形状に対応して自車両を停止させることが可能な緊急退避装置を提供する。
【解決手段】緊急退避制御ユニット30は、ナビゲーションシステム22、インフラ情報取得センサ24、ミリ波センサ26及び前方認識カメラ28が取得した自車両1が走行する道路の形状に関する道路形状情報に応じて自車両1を停止させる停止位置を決定し、車室内カメラ12等が検出した運転者の意識レベルが設定された閾値以下であるときに、スロットル制御ユニット32、ブレーキ制御ユニット34及びステアリング制御ユニット36が決定した停止位置に自車両1を停止させる。これにより、道路の形状に対応して自車両1を停止させることが可能となる。
(もっと読む)
車両制御装置とブレーキ電子制御装置と電動パワーステアリング装置
【課題】車両が搭載するバッテリの消耗を低減した車両制御装置等を実現することを目的とする。
【解決手段】車両に搭載されたバッテリ800を用いて車両を電気的に制御する車両制御装置100において、検知した車両状態に基づき車両の制御の迅速性が必要ではないと判断される場合に、バッテリ800の電流消費を低減するように、制御の通電量を抑制する車両制御装置100とする。好ましくはホイールシリンダを増圧する増圧弁を通電制御して要求制動力に対応する液圧を供給するブレーキ電子制御装置においては、検知した車両の状態に基づき要求制動の迅速性が必要ではないと判断される場合に、増圧弁への通電量を抑制するブレーキ電子制御装置とする。
(もっと読む)
車両の走行制御装置
【課題】車速を微低速目標車速に維持する微低速走行制御と自動変速機を第1速ギヤ段よりも高速側に切り換えて走行するスノー路面モードを有するオフロード走行制御とを同時に実行することができる車両の走行制御装置を提供する。
【解決手段】自動変速機22を第1速ギヤ段に固定して車速Vが予め設定された微低速目標車速Vmに維持されるように駆動輪の駆動力および制動力を制御する微低速走行制御手段140と、自動変速機22を第1速ギヤ段よりも高速側に切り換えて走行するスノー路面モードを有するオフロード走行制御手段136とを備えた車両の走行制御装置であって、微低速走行制御手段140は、オフロード走行制御の実行中に上記スノー路面モードが選択されているときには、自動変速機22を第2速ギヤ段に固定するものである。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバに与える違和感を少なくし、かつ、障害物を回避した自動運転を実現することができる
【解決手段】障害物回避ポテンシャル関数演算手段24によって、現在の目標到達点と障害物との相対位置に基づいて、障害物回避のためのポテンシャル関数を演算する。目標車両運動演算手段30によって、目標追従のためのポテンシャル関数、及び演算された障害物回避のためのポテンシャル関数の和である車両制御ポテンシャル関数に基づいて、現在の車両の進行方向と目標到達点へ向かう方向との偏角及び現在の車両の位置と目標到達点との相対位置における車両制御ポテンシャル関数の勾配を演算し、車両制御ポテンシャル関数の勾配に基づいて、目標車両運動を演算する。車両運動制御手段32によって、演算された目標車両運動を実現するように、操舵装置及び加減速装置を制御する。
(もっと読む)
自動運転システム及び自動運転方法
【課題】本発明の目的は、車両に所望の走行パターンを精度良く再現させるための自動運転システム及び自動運転方法を提供することである。
【解決手段】記憶部30Bは、位置目標値時系列データ及び車速目標値時系列データを記憶する。ハンドル駆動システム60は、位置目標値時系列データが記述する位置目標値と第2車両の位置とに基づいて第2車両のハンドル11Bの操舵角を制御する。ペダル駆動システム70は、車速目標値時系列データが記述する車速目標値と第2車両の車速とに基づいて第2車両のアクセルペダル12B又はブレーキペダル13Bの踏み込み量を制御する。ペダル駆動システムは、ペダルオフセットを用いて踏み込み量を制御する。調整部は、位置の変化を表す位置時系列データ、車速の変化を表す車速時系列データ、位置目標値時系列データ、及び車速目標値時系列データに基づいて、ペダルオフセットを調整するためのペダルオフセット調整値を出力する。
(もっと読む)
周辺車両監視装置及び周辺車両監視方法
【課題】交通事故の発生をより高い確率で抑止し、運転者のストレスを低減する。
【解決手段】自車両と先行車両との間に一定の車間距離があり、自車両の隣接車線を走行する周辺車両が自車両の斜め前方を走行している状況において、周辺車両の挙動から該当周辺車両が自車両と先行車両との間に割り込みを行うと予測される。そして、運転者に対して割り込みの可能性が報知されるとともに先行車両との車間距離を更に取る様にアドバイスされ、状況によっては自車両の制動制御が自動的に行なわれる。この様にして、周辺車両の微妙な挙動から起こりうる危険な状況を予測して未然に回避することによって、運転者の交通事故回避に対するストレスを軽減させ、交通事故の防止を図ることができる。
(もっと読む)
運転支援装置
【課題】ドライバの運転意思低下時に適切な運転支援制御を行う運転支援装置を提供する。
【解決手段】自車両前方の環境を認識して操舵機構に操舵力を付与する操舵制御、及び、自車両を減速させる減速制御を行う運転支援装置を、自車両の走行車線を認識する車線認識手段110と、走行車線内に設定された目標走行位置に沿って自車両が走行するように目標操舵力を設定する目標操舵力設定手段140と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段160と、自車両を減速させる減速制御手段190と、ドライバの運転意思低下を判定する運転意思判定手段180とを備え、操舵制御手段は、運転意思低下の判定に応じて操舵力の付与を中止し、減速制御手段は、運転意思低下の判定に応じて自車両を減速させる構成とする。
(もっと読む)
車両制御装置
【課題】
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
車両の走行制御装置
【課題】後続車の接近中に自車両の目標車速が変更されたときの加減速度を適正に制御することにより乗員の安全性向上を図る。
【解決手段】本発明の車両の走行制御装置は、自車両の走行速度をあらかじめ設定された目標車速に一致させる自動速度制御を行う自動速度制御手段2と、上記目標車速を一定速度刻みで増大または減少させる目標車速変更指示手段(23)と、自車両の後方を走行する後続車を検知する後続車検知手段(11)とを備える。上記自動速度制御手段2は、上記目標車速変更指示手段(23)により目標車速が変更されたときに、上記後続車検知手段(11)からの入力情報に基づき後続車が自車両に対し接近していることが確認されると、上記目標車速の変更に応じて自車両を加速または減速させる際の目標加減速度を、後続車が接近中でないときに設定される通常の目標加減速度βとは異なる値(α,γ)に変更する。
(もっと読む)
車両退避装置
【課題】運転者がハンドルに倒れかかってしまうような状況などであっても適切に車両を誘導することができる車両退避装置を提供すること。
【解決手段】車両の運転者の状態の異常を検知する検知し(S10)、運転者の状態が異常である場合に操舵入力を無効とし(S20)、操舵入力を無効とした状態で操舵制御によって車両の進行方向を調整し車両を退避位置まで誘導する(S22)。これにより、運転者がハンドルに倒れかかっていたりハンドルを握っており操舵系を作動させにくい状態であっても、適切な車両の退避が行える。
(もっと読む)
車両用走行支援装置および車両用走行支援方法
【課題】障害物回避制御を行う場合に、運転者の違和感を抑制すること。
【解決手段】回避経路情報演算手段が、自車両が障害物と車幅方向で重なり始めるときに、自車両のヨーレートが障害物から自車両が遠ざかる向きとなるように回避経路の情報を算出する。車両挙動制御手段が、算出した回避経路の情報に基づき、当該回避経路に沿って自車両が走行するように自車両の挙動を制御する。このため、自車両が障害物と車幅方向で重なり始めたときに、自車両を障害物から遠ざかる向きに回頭させることができる。そして、自車両が障害物に近づく方向に向かうような感覚を運転者に与えることを防止できる。この結果、障害物回避制御を行う場合に、運転者の違和感を抑制できる。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するよう操舵機構10に操舵力を付与する車線逸脱防止制御ユニット100を、走行車線に対する自車両の横速度を検出する横速度検出手段140と、走行車線内に設定した目標横位置Xcと自車両の横位置Xeとの偏差ΔXを積分することにより、走行車線からの逸脱を防止する方向へ第1の操舵力を設定する第1の操舵力設定手段(偏差制御操舵力算出手段)130と、横速度に基づいて走行車線からの逸脱を防止する方向へ第2の操舵力を設定する第2の操舵力設定手段(横速度制御操舵力算出手段)150と、第1の操舵力と第2の操舵力に基づいて目標操舵力を設定する目標操舵力設定手段160と、操舵機構に操舵力を付与する操舵力制御手段170とを備える構成とする。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
車両の運転支援装置
【課題】交差点における対向車両の発進を適切に判断し、不要な警報や制御介入を防止する。
【解決手段】交差点で対向車両がいない場合、自車両が交差点を直進或いは左折する場合、対向車両の位置が右折専用レーン或いは左折専用レーンである場合、対向車両のウィンカ或いはハザードランプが点滅している場合、駐車灯が点灯している場合、自車両側の信号機が右折可である場合、対向車両側の信号機が赤である場合、対向車両側の交差点の先の道路が渋滞している場合には、対向車両の発進予測処理を中止し(S16)、それ以外は、対向車両の発進予測処理を実行する(S15)。そして、障害物の衝突リスクを演算して衝突の可能性があるか否かを調べ(S18)、衝突の可能性がある場合、警報出力や自動ブレーキ・操舵等の運転支援制御を実行し(S19)、安全を確保する。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
21 - 40 / 177
[ Back to top ]