
Fターム[3D041AA00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475)
Fターム[3D041AA00]の下位に属するFターム
振動防止 (121)
耐久性向上 (142)
小型軽量化 (28)
構造簡素化 (54)
駆動装置間の単なる連動、自動化 (68)
公害対策 (80)
省燃費 (382)
始動性の向上 (92)
発進性の向上 (141)
走行性の向上 (1,351)
追従走行 (319)
駐停車性の向上 (98)
スリップ防止 (310)
変速性の向上 (387)
クラッチ性能向上 (138)
エンジン性能の向上 (53)
ブレーキ性能向上 (160)
制御の安定性、応答性の向上 (443)
安全性、フェイルセイフ (931)
Fターム[3D041AA00]に分類される特許
101 - 120 / 177
車両用駆動力制御装置

【課題】車両の位置ないしは車両と自動車専用道路の本線に対して接続される接続道路との位置関係を正確に判定して車両の駆動力を制御する。
【解決手段】自動車専用道路の本線から分岐して接続される接続道路と車両との位置関係に基づいて、前記車両の駆動力を制御する車両用駆動力制御装置であって、運転者による前記自動車専用道路の本線と前記接続道路との間の走行路の変更意図を検出又は推定する手段(S3)と、前記車両が前記自動車専用道路の本線と前記接続道路との間で走行路を変更したことを検出する手段(S4)とを備え、前記走行路の変更意図が検出又は推定されている間、又は前記走行路の変更意図が検出又は推定されている状態から予め設定された時間内に、前記車両が前記走行路を変更したことが検出されたときに、前記車両の駆動力の制御を許可する(S5)。
(もっと読む)
衝突被害軽減システム

【課題】衝突被害を確実に軽減することができるようにする。
【解決手段】車両の進行方向の物体を検出するレーダ装置11と、走行速度等を検出する車両状態検出部13と、車両が前記物体と衝突する危険度を判定する警報・制動判定部22と、他の車両との間で無線通信を行う無線通信部18と、を備えた複数の車両からなる衝突被害軽減システムであって、第1の車両1に搭載された警報・制動判定部22により第1の車両1の進行方向に存在する第2の車両2に対する衝突危険度が閾値以上と判断された場合には第1の車両1は第2の車両2へ警報情報を送信し、第2の車両2は、第1の車両1から警報情報を受信し且つ第2の車両2のレーダ装置11により第2の車両2の前方所定範囲に物体が検出されない場合に第2の車両2の走行制御手段が第2の車両を発進もしくは停止保持解除または加速を行う。
(もっと読む)
車両用走行支援装置及び車両用走行支援方法
【課題】本発明は、自車両の周辺車両に応じた適切な走行支援を行うことができる、車両用走行支援装置及び車両用走行支援方法の提供を目的とする。
【解決手段】自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されるときには、後続車両を減速させるため、自車両を制動制御する。自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されないときには、前方の障害物や対向車を回避する経路があって、側方又は後方の周辺車両に衝突するおそれがない場合には、自車両を操舵制御し、回避経路がなく又は周辺車両に衝突するおそれがある場合には、自車両を制動制御する。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】車両をユーザの所望の位置に自動的に駐車させることができる駐車支援方法及び駐車支援装置を提供する。
【解決手段】車両に搭載された駐車支援システム1の制御装置2において、車両に設けられ、車外にいるユーザを撮影する前方カメラ30及び後方カメラ31から画像データG1,G2を取得する画像データ入力部19と、取得した画像データG1,G2に基づき、ユーザが指示する車両の移動量又は方向を判断し、ユーザにより指示された移動量又は方向に基づき、車両を自動制御する駐車制御処理部15とを備えた。
(もっと読む)
車両用安全装置
【課題】車両の進行方向、左右方向へのドライバーの身体のふらつきが抑制され、ドライバーのステアリング操作性が向上する。
【解決手段】衝突前車両制御手段104がシートベルト制御信号を、ブレーキ制御信号よりも早いタイミングで生成する車両用安全装置にあって、ブレーキ制御信号により、自車両が減速制御されている間に、ステアリング操作量が所定値以上となった場合、衝突前車両制御手段104は、ブレーキ制御信号の生成を解除するが、シートベルト制御信号の生成を解除しないようにした。
(もっと読む)
駐車支援装置
【課題】駐車支援制御の際に段差をよりスムーズに乗り越えることが可能な駐車支援装置を提供すること。
【解決手段】駆動力出力手段(80)が出力する駆動力により、設定された目標駐車位置に車両を誘導する駐車支援装置(1)であって、車両の運動データを計測する運動データ計測手段(30、40、50、60)と、運動データ計測手段により計測された車両の運動データに基づき路面に段差が存在するか否かを判定し、段差が存在すると判定した場合には、運動データ計測手段により計測された車両の運動データに基づいて付加駆動力を導出し、段差が存在しないと判定した場合に駆動力出力手段から出力される基本駆動力に加えて、導出した付加駆動力を出力するように駆動力出力手段を制御する制御手段(90)と、を備えることを特徴とする。
(もっと読む)
車両制御システム、ナビゲーション装置、車両制御装置
【課題】ナビゲーション装置から車両制御装置への通信遅延時間中に車両が移動しても、正確なタイミングで車両を制御することができる車両制御システムを提供する。
【解決手段】ナビゲーション装置1は、走行距離積算部105により走行距離積算値を求め、制御指令データ出力部108により、特定された制御開始位置を走行距離積算値により表した制御開始位置の情報を含む制御指令データを車両制御装置2に対して出力する。車両制御装置2は、走行距離積算部204により求められた走行距離積算値と、制御指令データ出力部108から出力された制御指令データとに基づいて、車両制御部207により自車両の走行を制御する。
(もっと読む)
車両用制御装置
【課題】走行目標に対する実車両の追従性を向上させることができる、車両用制御装置の提供を目的とする。
【解決手段】目標軌跡や速度パターン等の走行目標に応じて走行する車両の運動状態をモデル化した動的車両モデルに基づいて、実車両100の操作に必要な操作量を変化させる操作量と運動状態量を算出するとともに、算出された操作量と運動状態量が実車両100に対する所定の走行要求を満たせるか否かを判断し、前記走行要求を満たせると判断された操作量と運動状態量のそれぞれを、フィードフォワード(FF)操作量と状態フィードバック(FB)制御における目標状態量として設定する、車両用制御装置。
(もっと読む)
衝突回避支援装置及びそれを搭載した車両
【課題】自車の推定進路内に占める障害物の大きさと障害物との相対速度に基づいて介入開始タイミングを変化させ、安全性を損なうことなく介入操作による運転者に対する違和感を低減することができる衝突回避支援装置の提供。
【解決手段】介入タイミング算出手段103は、前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する。進路余裕度算出手段112は、自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出し、介入タイミング補正手段104は、前記進路余裕度算出手段112で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する。
(もっと読む)
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
走行支援装置
【課題】必要な状況にのみ走行支援を行い、運転者が違和感を覚えることなく自車両の衝突を防止することのできる走行支援装置を提供する。
【解決手段】自車両が交差点に向かって非優先道路を走行していると判断されると共に、自車両の斜め前方に存在する他車両が検出されると、自車両と他車両とが、衝突する可能性があるか否かが判定され、その結果に応じて回避支援部が作動される。この時、自車両が交差点に向かって非優先道路を走行していると判断されていると、優先道路を走行している場合に比べて、衝突する可能性があると判定し易くする。従って、自車両が非優先道路を走行している場合には、適切な走行支援を行い、優先道路の場合には走行支援を行いにくくする。
(もっと読む)
車両の進行方向推定装置及び運転支援システム
【課題】車両の速度ベクトルを算出することで、現時点における車両の進行方向を推定することのできる車両の進行方向推定装置、及び、これを用いた運転支援システムを提供する。
【解決手段】演算部110は、前後加速度センサ20及び横加速度センサ30によって検出される加速度を所定の周期でそれぞれサンプリングして前後加速度Ax(n)及び横加速度Ay(n)を取得する。また、演算部110は、記憶部120に記憶保持されている速度ベクトルV(n−1)及びヨーレートセンサ40のセンサ出力値βに基づいて速度ベクトルVpreを算出するとともに、この速度ベクトルVpreの各成分Vx_pre及びVy_preに、前後加速度Ax(n)と所定時間Δとの積及び横加速度Ay(n)と所定時間Δtとの積をそれぞれ加算することで速度ベクトルV(n)を算出する。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動の発生を精度良く検出し適切にロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置1は、車両の横力を、スリップ角及び接地荷重の少なくとも一方を変数とした非線形の関数として演算し、その演算した横力と、少なくとも車両のロール角、ヨー角、上下変位と、に基づいて車両におけるロール振動の発生の有無を判断すると共に、その判断の結果ロール振動が発生すると判断された場合、ロール振動を抑制する。
(もっと読む)
自動車の走行方向を検出するための方法
本発明は、事故回避保護システムを有する車両の走行方向を検出するための方法であって、次のステップ、
a)車両方向の車両の前の対象物を検出するステップと、
b)相互の相対位置に基づき車両と対象物が接触する可能性を算出するステップと、
c)対象物が接触する可能性に関する算出結果に基づき運転者によらない制動及び/又は操舵行程を作動するステップとを含む方法に関する。
保護システムの誤った作動を回避するために、本発明に従って、別のステップ、すなわち、
e)予防的に作用する保護システム114又はこの予防的に作用する保護システム114と結合された安全装置116を有する車両の走行方向を算出するステップ、及び後退走行が検出されたときに、運転者によらない制動及び/又は操舵行程を阻止又は中断するステップが提供される。 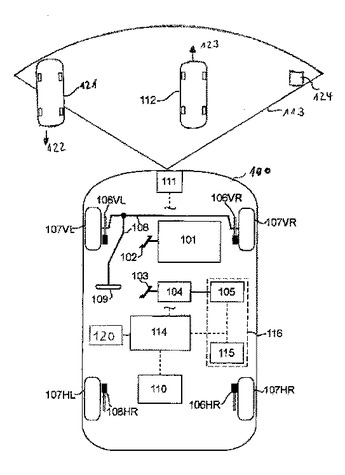 (もっと読む)
(もっと読む)
衝突時衝撃軽減装置及び車両
【課題】他車両による後方からの追突時に確実に乗員の安全を確保できる衝突時衝撃軽減装置及びその衝突時衝撃軽減装置を備えた車両を提供すること。
【解決手段】本発明の衝突時衝撃軽減装置及び車両によれば、他車両進行方向取得手段により取得された進行方向と他車両速度取得手段により取得された他車両の速度とに基づいて、他車両の移動可能な範囲が推定されるので、加速手段による加速を適切なタイミングで実行することができる。よって、衝突の際に自車両が他車両から受ける衝突エネルギーを確実に軽減することができるので、乗員の安全を確実に確保できる。
(もっと読む)
運転者状態推定装置及び運転支援装置
【課題】生体情報が正常に測定できない場合であっても、生体情報に基づいた運転者の状態の推定を行う。
【解決手段】ドライバの生体情報を計測し、正常に生体情報が計測できている場合には、計測した生体情報からドライバの状態(正常状態、覚醒度低下等)を推定する。一方、推定したドライバの状態に対応して、正常に生体情報を計測した際の運転状況(車両情報と環境情報)を蓄積することで、生体情報に基づくドライバ状態を運転状況から推定するドライバモデルを構築しておく。ドライバの生体情報の検出が正常である場合には、計測した生体情報に基づいて現在のドライバの状態を推定し、正常でない場合には、ドライバモデルを使用して現在の運転状況からドライバの状態を推定する。
(もっと読む)
緊急回避運転性と車体振動抑制とが調和された車輌
【課題】車輌の緊急回避運転性と車体振動の抑制とが調和された車輌を提供する。
【解決手段】車体と、駆動手段、制動手段および操舵手段を含む操縦手段と、電子制御装置とを有し、電子制御装置は運転者の操縦操作に応じて操縦手段を制御する運転操作応答制御を行うと同時に車体の振動を抑制する車体振動抑制制御を行うようになっている車輌に於いて、電子制御装置は車輌が緊急回避運転されるとき緊急回避運転性を優先させるように車体振動抑制制御を変更する。
(もっと読む)
車両用経路算出装置および車両用経路算出方法
【課題】車両用経路算出装置において、障害物との接触時における車速の算出精度を高めて、自車両との相対速度が相対的に高い障害物との接触を回避した経路を選定する。
【解決手段】ロータリーエンコーダ12およびカメラ11等によって得られた情報に基づいて、自車両200が障害物(1,2,3)に接触するのを回避することが可能か否かを所定の時間間隔ごとに繰り返し判定する回避判定手段13aとしての機能と、後述する自車両200の横移動に伴う減速度の低下を見込みつつ、障害物との接触時における相対速度を算出し、算出された相対速度が相対的に最も低い障害物に接触する経路を選定する経路選定手段13bとしての機能を備える。
(もっと読む)
車両走行制御システム
【課題】ナビゲーションシステムの持つ地図情報と地図情報以外から得られる情報(例えば、カメラなどの撮像装置による白線認識)の両者を有効に利用して安定性の高い速度制御を行う。
【解決手段】地図情報に応じて第1の目標速度を演算し、地図情報以外から得られる道路形状(例えば、カメラにより検出される白線認識結果)に応じて第2の目標速度を演算し、第1の目標速度と前記第2の目標速度を比較して、より低い目標速度を選択して自車の速度を制御する。
(もっと読む)
自動変速機のレンジ切換制御装置
【課題】 従来よりもさらに、後方から追突された場合の移動距離を短くすることができる自動変速機のレンジ切換制御装置を提供すること。
【解決手段】 セレクト操作入力部1と、アクチュエータ3と、位置センサ33と、制御器2と、を備える自動変速機のレンジ切換制御装置において、車両後部からの衝突を検出する後部衝突センサ6を設け、制御器2は、車両後部からの衝突を検出した場合に、レンジ位置がPレンジ位置ならば、レンジ位置をNレンジ位置へ切り換えた。
(もっと読む)
101 - 120 / 177
[ Back to top ]