
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
81 - 100 / 1,660
車両の駆動力制御装置
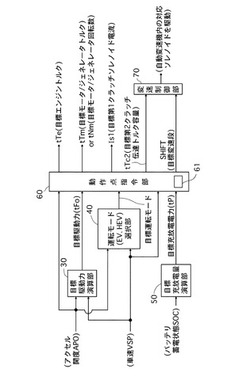
【課題】 アクセルオフによりドライブ走行からコースト走行へ移行する際のショックの緩和と空走感の抑制とを両立できる車両の駆動力制御装置を提供する。
【解決手段】 目標駆動力tFoを算出する目標駆動力演算部30と、推定駆動力Fo^を算出する実駆動力推定手段と、目標駆動力tFoと推定駆動力Fo^との偏差である駆動力偏差ΔFoが減少方向に変化している場合、目標駆動力tFoが所定のトルク閾値Fo_th未満のときには目標駆動力tFoがトルク閾値Fo_th以上のときよりも目標駆動力tFoの変化率を大きく制限する駆動力変化率制限部61と、を備えた。
(もっと読む)
走行制御装置

【課題】車両の搭乗者に与える不快感を軽減できる走行経路を生成する走行制御装置を提供すること。
【解決手段】走行制御装置100では、仮の走行経路の生成を試みる場合に、生成予定の仮の走行経路について操舵量累積値STを算出する。そして、算出した操舵量累積値STが操舵量累積積閾値Aを超えていれば、車両1が蛇行するなどの走行経路が生成されるおそれがあり、搭乗者に不快感を与えるおそれがあるため、別の仮の走行経路の生成を試みる。一方、算出した操舵量累積値STが操舵量累積積閾値A以下であり、目標とする駐車位置に到着可能であれば、その仮の走行経路を用いて、走行経路全体を生成する。これにより、走行経路が生成される場合には、車両1の操舵角の変化が抑制される走行経路を生成できるので、搭乗者に与える不快感を軽減できる走行経路を生成できる。
(もっと読む)
車体制振制御装置
【課題】車輪スリップ防止装置の作動→非作動で車体制振制御を再開させるとき、車輪スリップ防止装置が再作動されることのない態様で車体制振制御を再開させるようにする。
【解決手段】車輪スリップ防止装置の作動開始時に制振用制駆動トルク補正量指令dTw*を0にして車体制振制御を中断する。車輪スリップ防止装置の作動時間がT1未満である間、一時的低μ路面と判断し、車輪スリップ防止装置の作動時間がT1以上である間、継続的低μ路面と判断して、車体制振制御を引き続き中断する。車輪スリップ防止装置が非作動になった時からT2時間中は、誤判定防止のために継続的低μ路面の判定結果を維持し、車輪スリップ防止装置が非作動になった時からT4時間をかけて、制振用制駆動トルク補正量指令dTw*を0から徐々に(dTw_Tw+dTw_ΔF)へ復帰させ、制振制御をT4時間だけ遅延させる、制振制御復帰制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
運転支援装置
【課題】渋滞区間の交通流を改善する運転支援装置を提供することを課題とする。
【解決手段】渋滞区間における運転支援を行う運転支援装置であって、渋滞区間の平均速度を取得する平均速度取得手段と、平均速度取得手段で取得した渋滞区間の平均速度より高い速度を渋滞区間における上限速度として設定する上限速度設定手段と、上限速度設定手段で設定した渋滞区間における上限速度に基づいて運転支援(例えば、速度制御、情報提供)を行う運転支援手段とを備えることを特徴とし、渋滞区間において運転支援装置を搭載する車両が走行している割合を取得する走行割合取得手段を備え、上限速度設定手段は、走行割合取得手段で取得した走行割合に応じて上限速度を設定すると好適である。
(もっと読む)
車両走行制御装置
【課題】パワートレインの制御に対する運転者の違和感を軽減する。
【解決手段】車両走行制御装置100は、車両に搭載されたエンジン51及び変速機52を含むパワートレイン5を制御する。また、車両走行制御装置100は、地図情報と対応付けて、道路の勾配値を示す勾配値情報を含む路面情報を予め格納する路面情報記憶部22と、過去の該車両の走行時に、該車両の運転者によって行われた操作を示す操作情報である操作履歴情報を、前記地図情報と対応付けて記憶する操作履歴記憶部23と、前記路面情報、及び、前記操作履歴情報に基づいて、パワートレイン5を制御する第1走行制御部111と、を備える。
(もっと読む)
車両制御装置
【課題】複数種類の走行制御による所定区間の相互に異なる分割要求に対して、記憶容量の制限を考慮しつつ適切に所定区間を分割することができる車両制御装置を提供する。
【解決手段】複数種類の走行制御による前記リンクの相互に異なる分割要求に対して、前記リンクが分割された分割区間毎に前記走行負荷情報を記憶する為のメモリ部82の記憶容量が不足する場合に、分割調停部84によりその異なる分割要求が取捨選択されてその異なる分割要求が調停されるので、メモリ部82の記憶容量の制限を考慮しつつ適切にそのリンクを分割することができる。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び制御対象車輪の全てについてのトラクション制御の両者が同時に行われる場合に、駆動要求が満たされない不満を運転者が感じる虞れを低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回補助制御の実行中にトラクション制御によって全ての制御対象車輪の前後力が低減される状況に於いては、旋回補助制御による旋回内輪の前後力の低減量を小さくし、或いは旋回補助制御による旋回内輪の前後力の低減を中止する。これにより旋回内輪の前後力の低減量が減少する量にて車両全体の駆動力が増大される。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
走行支援装置及び方法
【課題】車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速との調和を図り、車輌を安定的に走行させる技術を提供する。
【解決手段】車線境界を示す道路標示又は走行不可域を基準にして車輌の走行可能な走路を設定し、当該走路からの車輌逸脱時に、車輌を走路内で走行させるように補助を行う走行支援装置であって、車輌が走路を超えないための目標ヨーレートYtrgよりも実際のヨーレートYreaが小さい場合にその差△Yに応じて、車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速とを個別に制御する。
(もっと読む)
アイドルストップ車の制御装置
【課題】走行中(減速中)にエンジンを自動停止してアイドルストップする際の走行停止前にドライバの意思でアイドルストップを中止し、エンジンを再始動して再発進するときの車両のずり下がりを防止する。
【解決手段】エンジンの自動停止かつ減速中のアイドルストップの制御により所定車速以下になった場合、ブレーキ制御ECU13により、車速の低下に応じてブレーキ液圧制御バルブ8aの通電量を大きくしてその動作のタイムラグを次第に少なくする。そのため、例えば坂路において、アイドルストップの制御の実施により、エンジンの自動停止後、低速走行中にドライバがブレーキペダルからアクセルペダルに踏み替えて再発進の意志を示し、エンジンを再始動するときには、ペダルの踏み替えのタイミングでホイルシリンダ9FR〜9RRが、ブレーキ液圧制御バルブ8aにより保持された消失前の十分なブレーキ圧を確実に保持して車輪に与える。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良相発生における、特に高速走行中でのトルクリップルの影響を抑制し、微妙なハンドル操舵を容易にすることのできる電動パワーステアリング装置を提供する。
【解決手段】CPU17は、モータ12の何れかの相に通電不良が発生した場合に該異常の発生を検出可能な異常判定部31を備え、該異常が検出された場合には、当該通電不良発生相以外の二相を通電相としてモータ制御信号の生成を実行する。そして、このとき、CPU17は、当該通電不良発生相に応じた所定の回転角を除いて、q軸電流指令値Iq*に対応したq軸電流値Iqが発生するようにd軸電流指令値Id*を演算する。そして、EPSECU11から、CAN通信20を通じてエンジンECU19に、車速制限要求信号Vrsを出力する。エンジンECU19は受取った車速制限要求信号Vrsが「1」の場合、エンジン回転数制御を行い、車速を所定車速V0以下にする。
(もっと読む)
車両用故障診断装置
【課題】車両運転者が、バイワイヤシステムの故障検出のために必要な操作を容易に行うことができる技術を提供
【解決手段】バイワイヤ制御部15は、起動スイッチのオン後に、ステアリング可動域制限部11(アクセル可動域制限部12、ブレーキ可動域制限部13)により、ステアリングST(アクセルペダルAP、ブレーキペダルBP)の操作を0°〜54°(0%〜10%、0%〜10%)の範囲内に制限する。そして、ステアリング操作量(アクセル操作量、ブレーキ操作量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)内であると判断した場合に、転舵量(駆動量、制動量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)に応じて予め設定されたステアリング正常判定範囲(アクセル正常判定範囲、ブレーキ正常判定範囲)内であるか否かを判断する。
(もっと読む)
車両走行制御装置
【課題】異なる駆動方式を持つそれぞれの車両に対して、駆動力源が要求する駆動力指令の対象が異なっても、駆動力指令の算出方法を変更することなく要求の対象となる駆動力指令を出力する車両走行制御装置を提供する。
【解決手段】予め算出された目標車速と、検出された実車速と、に基づいて目標加速度を算出する目標加速度演算部と、目標加速度から駆動力指令を算出し、算出された駆動力指令を出力する駆動力演算部と、を有し、駆動力演算部は、接続される駆動力源に応じて、予め定めた複数の変換比を用いて変換された、複数の駆動力指令のうち、少なくとも1つを出力する。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び車両運動制御の両方について実行の要否を判定し優先順位の高い方の制御を選択する必要性や頻度を低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の前後力を制御することにより車両の旋回運動を安定化させる車両運動制御とを行う車両の走行制御装置。旋回補助制御の許可車速域は車両運動制御の許可車速域よりも低く設定されている。特に旋回補助制御の許可車速域の下限値は車両運動制御の許可車速域の下限値Vvscよりも低い。或いは旋回補助制御の許可車速域の上限値Vtaはオーバーステア抑制制御の許可車速域の下限値Vspよりも高いが、旋回補助制御の許可車速域の下限値はオーバーステア抑制制御の許可車速域の下限値Vspよりも低い。
(もっと読む)
車両駆動装置のための制御装置
【課題】内燃機関、摩擦係合装置、回転電機の順に設けられた車両駆動装置において、摩擦係合装置のスリップ制御時にトルク増幅制御も可能とする。
【解決手段】摩擦係合装置12の伝達トルク容量を決定するトルク容量決定部と、摩擦係合装置の入出力速度比に基づいて、1以上の値となるトルク増幅率を導出するトルク増幅率導出部と、トルク容量決定部により決定された伝達トルク容量と、増幅率導出部により速度比に基づいて決定されたトルク増幅率とを用い、伝達トルク容量にトルク増幅率を乗算した値から伝達トルク容量を減算した値に基づいて、回転電機の出力トルクの指令値を決定するトルク指令値決定部とが備えられる。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両制御装置
【課題】運転者の意図に即した走行と燃費の向上を両立させることのできる車両制御装置を提供する。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化より遅くする指標設定手段(ステップS2)を有し、前記車両の駆動力源の出力を制御することに伴って、予め定めた範囲内で駆動力源の燃費エネルギ効率を変化させるように、前記指標に基づいて走行特性を補正設定するように構成された制御器(ステップS8)を備えている。
(もっと読む)
車両制御装置
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
81 - 100 / 1,660
[ Back to top ]