
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
21 - 40 / 1,660
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
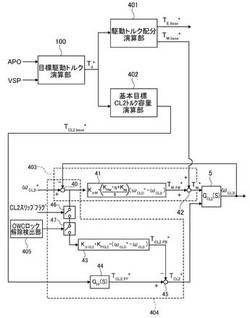
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
車両の制御装置

【課題】第2モータジェネレータの出力トルクTMが零付近である状態においてギヤの歯同士が衝突することによる音の発生を未然に防ぐ。
【解決手段】エンジンと、第2モータジェネレータと、エンジンと第2モータジェネレータとを連結するギヤと、エンジンによって駆動されて発電する第1モータジェネレータと、第1モータジェネレータが発電した電力を蓄える蓄電装置とが搭載された車両の制御装置は、蓄電装置の残存容量が予め定められたしきい値より大きいと、エンジンの出力軸回転数が増大するように制御するECUを備える。
(もっと読む)
走行支援装置
【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
ハイブリッド自動車
【課題】こもり音の発生を回避しつつ、運転者や乗員に違和感を与えるのを抑制する。
【解決手段】車速Vが閾値Vref未満の低車速走行時にエンジンを燃費最適動作ラインで運転して車両要求パワーPe*を出力するとエンジンの運転ポイントがこもり音領域内となるときには、エアコン要求パワーPa*より小さな値の補正用パワーPalimをエアコン要求パワーPa*の代わりに用いて車両要求パワーPe*が小さくなるよう再設定(補正)し(S150)、この再設定(補正)した車両要求パワーPe*と燃費最適動作ラインからこもり音領域を回避して得られる実行用動作ラインを用いてエンジンの目標回転数Ne*や目標トルクTe*を設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンやモータMG1,MG2を駆動制御する(S160〜S210)。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
車両の制御装置
【課題】旋回性能向上制御を実行する場合に、エンジンの始動・停止に起因するドライバビリティの低下を回避して、車両の旋回性能を適切に向上させることができる車両の制御装置を提供すること。
【解決手段】少なくとも内燃機関を駆動力源として有し、旋回走行中に該駆動力源の出力によって発生させる駆動力もしくは制動力を補正することによりスタビリティファクタを目標値に追従するように変化させる旋回性能向上制御を実行する車両の制御装置において、前記旋回性能向上制御を実行する場合に、前記内燃機関の運転状態が停止から始動にもしくは燃焼運転から停止に切り替えられることがないように前記駆動力もしくは前記制動力を補正する駆動力補正手段(ステップS2〜S7)を設けた。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
運転支援装置
【課題】LKA制御が中止したことをドライバーに警告音や表示により知らせていた従来の方法と比較し、LKA制御が中止したことをドライバーにより気付きやすい方法で報知することのできる運転支援装置を提供する。
【解決手段】車両の走行状況を検出する走行状況検出手段と、車両のドライバーの運転を支援するために複数の制御を行う制御手段と、予め定められた時間、車両のドライバーが当該車両のハンドルから手を離したか否かを判断する判断手段と、判断手段が車両のドライバーは予め定められた時間ハンドルから手を離したと判断した場合、複数の制御のうち少なくとも2つ以上の制御を中止する中止手段とを備える。中止手段は、判断手段が車両のドライバーは予め定められた時間ハンドルから手を離したと判断した場合に車線維持制御および当該車線維持制御と異なる制御を中止することを特徴とする。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】定速走行制御下における燃費性能の改善を図ると共に、高度な安全性を有するハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)の制御装置(26)は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する手段(16)と、車間距離を検出する手段(18)と、走行路面が下り勾配を有する場合に、下り勾配の最下地点bより手前側に設定された惰性走行開始地点aから惰性走行を開始し、車間距離が所定車間距離L1未満となった場合に前記惰性走行を中止する制御手段(26)とを備える。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を全体として効率的に運転でき、もって燃費向上を達成できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】バッテリ18のSOCが十分であるときに変速機8の変速段を一段飛び越えて切り換えるスキップ制御モードを実行し、通常制御モードで第3速または第5速が選択されるべき領域で第4速または第6速を選択することにより、エンジン2の回転域を低回転側に移行させて燃料消費量を低減する。これにより生じるエンジントルクの不足分を電動機6のトルク増加で補償することにより、運転者の要求トルクを達成する。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時にクラッチを係合する際に、エンジンが逆回転するのを抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両に搭載され、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、クラッチ同期制御手段と、ポンピングロス制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。クラッチ同期制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、エンジンの始動前に、第1回転電機のトルクに基づきクラッチの係合要素の回転を同期させる制御を行う。ポンピングロス制御手段は、上述の制御時に、ポンピングロスを大きくする制御を行う。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
電気自動車の電源制御装置
【課題】車両の走行状態に応じて適切な電源を選択し、効率よく電動機の電源を使用することができるとともに、バッテリの劣化を防ぐことのできる電気自動車の電源制御装置を提供すること。
【解決手段】車両1が渋滞に突入している場合(S2)の充電時(S4)においては、キャパシタ充電率が上限値に達していない限り(S5)、電動機6の電源として電源選択部22によりキャパシタ20を選択することで、当該キャパシタに優先的に充電を行う(S6)。
(もっと読む)
車両制御装置
【課題】車両停車時における乗り心地の向上を図ることができる車両制御装置を提供する。
【解決手段】本発明は、クルーズコントロール制御と先行車に対する追従制御とからなるACC制御を行う車両制御装置1であって、ACC制御中に自車両の停車位置情報を取得する停車位置情報取得部10と、停車位置情報取得部10が停車位置情報を取得した場合に、自車両が停車位置に停車するための走行計画を作成する走行計画作成部11と、走行計画作成部11の作成した走行計画に基づいて、自車両の走行制御を行う車両制御部14と、を備える。この車両制御装置1によれば、ACC制御中であっても、停車位置情報に基づいた走行計画に沿って自車両を停車させるので、先行車との車間距離に基づいて停車させる従来の制御と比べて、スムーズに停車を行うことができ、車両停車時における乗り心地の向上を図ることができる。
(もっと読む)
車両の統合制御装置
【課題】たとえ、アクセル操作に対してエンジンに発生させる駆動力特性として複数のモードを備えた車両であっても、各モードの違いを十分に発揮しながら、それぞれのモードにおいて最適な燃費を実現する。
【解決手段】統合_ECU22には、エンジン1の複数のモードに応じたそれぞれ異なるエンジンの燃料消費に係る特性(エンジンの燃料消費率マップ)を予め記憶して、予め設定した運転条件が成立する場合に、燃費優先制御を実行すべく、現在選択されているモード(M1、M2、M3の何れか)に対応するエンジンの燃料消費率マップに基づいて、現在のエンジンの運転状態よりも燃費が向上するエンジンの運転状態を選択し、該選択したエンジンの運転状態に基づいて、エンジン1と無段変速機3の少なくとも一方を制御する。
(もっと読む)
車両の動力伝達制御装置
【課題】電動機の出力軸に対する駆動輪の減速比を変更する切替機構を備えたHV−MT車において、運転者が前記減速比の変更に伴うショックを感知し難くすること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関E/GとモータM/Gとを備えたハイブリッド車両に適用され、手動変速機M/Tと、摩擦クラッチC/Tと、減速比切替機構とを備える。減速比切替機構は、「M/Gの出力軸と接続される第1軸」に対する「M/Tの出力軸と接続される第2軸」の減速比を変更可能となっている。第1軸に対する第2軸の減速比を変更することにより、M/Gの出力軸に対する駆動輪の減速比が変更される。運転者がクラッチペダルCPを操作している間に減速比を変更する作動が実行される。即ち、運転者は、何らかの操作を行っている間に減速比変更作動に伴うショックを受けることなり、運転者は係るショックを感知し難くなる。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
21 - 40 / 1,660
[ Back to top ]