
Fターム[3D041AC14]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | 変速装置 (1,781)
Fターム[3D041AC14]の下位に属するFターム
Fターム[3D041AC14]に分類される特許
21 - 40 / 158
車両のヨーモーメント制御装置
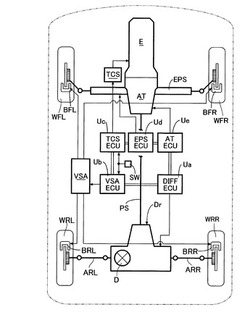
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
ハイブリッド電気自動車の発進制御装置

【課題】走行用動力源の電動機を用いたエンジン自動始動後に発進変速段への切換操作に起因する遅れを生じることなく迅速に車両を発進できるハイブリッド電気自動車の発進制御装置を提供する。
【解決手段】停車状態からの車両発進時においてエンジン1が自動停止されているとき、第1歯車機構G1をニュートラル状態にすると共にアウタクラッチ21を接続して電動機2によりエンジン1を始動する一方、第2歯車機構G2を第3速に切り換えてインナクラッチ22を接続し、この第3速を介してエンジン1の駆動力で車両を発進させることにより、第1歯車機構G1をニュートラル状態から発進変速段である第2速に切り換えることによる遅れを防止する。
(もっと読む)
走行装置
【課題】坂道登坂時に、車両が後退することを確実に防止し、安定した坂道停車及び坂道発進を実現することのできる走行装置を提供すること。
【解決手段】逆入力遮断クラッチ(32)により高速走行用駆動ユニット(16)及び高トルク走行用駆動ユニット(18)による走行を切替可能なクローラ走行装置(8)を備えたクローラロボット(1)において、坂道停車時に逆入力遮断クラッチが遮断状態となった場合(S1〜S3)、ブレーキ(26)を作動させてクローラロボットを停止させ(S4〜S6)、発進時には逆入力遮断クラッチが接続状態になったことを確認した後にブレーキを解除する(S7〜S9)。
(もっと読む)
車両の制御装置
【課題】エンジンを搭載した車両において、低コスト化の要求を満たしながら、運転者の誤操作による事故を防止又は軽減できるようにして、安全性を向上させる。
【解決手段】車両停止後の発進時に変速機12の進行方向切換状態が車両停止直前と同一状態でアクセル開度が増大したときにエンジン11の出力トルクを制限するトルク制限制御を実行する。これにより、車両が前進(又は後進ギア)で駐車スペースに進入して停止した後、運転者が誤って変速機12を前進ギヤ(又は後進ギア)にした状態でアクセルペダルを踏み込んだ場合に、車両の急発進を防止する。更に、車両停止直前の減速中にアクセル開度が増大したときにもトルク制限制御を実行する。これにより、車両が駐車スペースに進入して停止する直前の減速中や道路が渋滞中で停止直前の減速中に運転者がブレーキペダルと間違えてアクセルペダルを踏み込んだ場合に、車両の急発進を防止する。
(もっと読む)
車両制御装置
【課題】運転者の違和感を低減してドライバビリティを向上させる。
【解決手段】本発明の車両の制御装置40は、運転者により所定の加減速操作がなされているか否かを判定する加減速判定部61と、動力伝達経路のうち遊びのある係合部分36a,37aに対して動力伝達上流側にある入力軸24と、係合部分36a,37aに対して動力伝達下流側にある出力軸28との相対回転位置X及び相対回転速度Vの少なくとも一方の値を検出する動力伝達状態検出部62と、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62により検出された値に応じて、動力伝達部材36,37間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する加減速制御部63とを備えている。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
車両前後進判定装置及び車両制御装置
【課題】 簡単かつ安価な構成でありながら、車両の進行方向を取得して、運転者の意思に沿った円滑な走行の実現しつつ、車両側への負担を軽減できるきめ細かな制御を可能にする車両前後進判定装置及び車両制御装置を提供することを目的とする。
【解決手段】 本発明に係る車両前後進判定装置は、停止中の車両が動き出した方向を情報として取得する車両前後進情報取得手段(ECU4、Gセンサ12等)と、車両の運転者の意思を操作情報に基づいて取得する運転者意思取得手段(シフト/セレクトストロークセンサ9等)と、前記車両前後進情報取得手段により取得された停止中の車両が動き出した方向と、前記運転者意思取得手段により取得された運転者の意思と、に基づいて、停止中の車両が動き出した方向が車両の運転者の意思に沿った方向か否かを含めて前後進判定する判定手段(ECU4)と、を含んで構成される。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】自車両の車線幅方向横位置が予め設定した自車両に対する接近防止の指標となる車線幅方向横位置である制御開始位置となった場合、制御開始と判定して自車走行車線の中央側へ向かうヨーモーメントを自車両に付与して自車両を制御する。そして、自車両の車線幅方向横位置が前記制御開始位置の外側から内側に移動した場合、予め設定した制御状態保持時間が経過するまでの間、前記制御開始の判定を前記制御開始位置の内側に移動する前と比較して抑制する。
(もっと読む)
車両の速度制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置を提供すること。
【解決手段】車両の前方における車両が走行している道路上の複数の位置データ(ノード点)Nd[n]が取得され、各ノード点Nd[n]における道路の屈曲度Rc[n]が演算される。この屈曲度Rc[n]に基づいて、カーブ内屈曲度一定区間Cr#が識別され、Cr#についてのカーブ内一定屈曲度Rm#、及びカーブ端点位置Px#が決定される。車両の実車速Vxa、カーブ内一定屈曲度Rm#から演算される適正車速、及び、カーブ端点位置Px#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。即ち、カーブ内において最も屈曲度が大きい区間の開始地点、及びその区間の一定屈曲度に基づいてカーブ減速制御がなされる。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両制振制御装置
【課題】適正に制振制御を実行することができる車両制振制御装置を提供することを目的とする。
【解決手段】車両10に搭載された動力源21を制御し車両10のバネ上振動を抑制する制振制御を実行する車両制振制御装置1において、動力源21の運転領域に応じて制振制御の態様を変えることを特徴とする。したがって、車両制振制御装置1は、動力源21の運転領域に応じて制振制御の態様を変えることで、例えば、制振制御と動力源21に関する他の制御との協調を図ることができ、適正に制振制御を実行することができる。
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両の駆動制御装置
【課題】クルーズコントロールの制御時にも簡単な演算処理により通常制御時と同じ内容の制御入力を通常制御時と同じ制御系の同じ位置(最上流位置)に入力してエンジンのスロットル開度の制御およびトランスミッションの変速制御を行なう。
【解決手段】クルーズコントロールの制御時、擬似アクセルペダル開度演算部93により、目標出力演算部92の目標出力P*に対応する擬似アクセルペダル開度θa*を、特性マップG1、G2と、車速センサ3の検出車速Vとに基づき、目標トルクと回転数の積が目標出力P*となるアクセルペダル開度から逆引き演算して簡単に算出する。さらに、スイッチ8により、制御入力としてのアクセルペダルの開度を、検出アクセルペダル開度θaから擬似アクセルペダル開度θa*に切替え、擬似アクセルペダル開度θa*と検出車速Vとに基づく目標スロットル開度θt*にしたがってエンジンスロットル6を制御する。
(もっと読む)
車両用制御装置
【課題】状況に応じてニュートラル制御機能又はアイドルストップ機能を適切に実行させることができる車両用制御装置を提供する。
【解決手段】アイドルストップ機能を有すると共に、変速装置の入力クラッチと、エンジンにより駆動される機械式ポンプと、エンジンの停止時に電動モータにより駆動される電動ポンプと、を有する車両に備えられた車両用制御装置41。少なくとも所定のニュートラル移行条件を満たす場合に、入力クラッチに対する供給油圧を油路のライン圧により制御し、入力クラッチが半係合状態とされるニュートラル状態を実現するニュートラル制御部45と、ニュートラル移行条件が成立した場合に、ニュートラル状態への移行を所定の遅延時間だけ遅延させる移行遅延制御部47と、遅延時間中にアイドルストップ条件が成立しなかった場合に、ニュートラル状態に移行させる移行開始制御部49と、を備える。
(もっと読む)
省燃費運転推奨装置
【課題】自動変速機の変速時に運転者に対して違和感を与えることを抑制することができる省燃費運転推奨装置を提供すること。
【解決手段】省燃費運転推奨装置11は、変速段指示信号に応じて変速段が変更される有段式の自動変速機14を備える車両に搭載されている。省燃費運転推奨装置11は、アクセルペダルの操作量及び自動変速機14の変速段に基づいて要求駆動力を算出し、その要求駆動力に基づいて車両の省燃費運転に関する判定を行い、その判定結果を通知する。省燃費運転推奨装置11は、エンジン12の出力制御を行うための出力制御用要求駆動力と省燃費運転状態にあるか否かを判定するための判定用要求駆動力とをそれぞれ算出する。判定用要求駆動力の算出に際しては、変速段を示すパラメータとして変速段指示信号とは異なる判定用変速段信号を用い、この判定用変速段信号を変速段指示信号が変更された後に変速段指示信号と同一になるように変更する。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
車両制御装置
【課題】走行制御の追従性の向上を図ることのできる車両制御装置を提供すること。
【解決手段】車両1の走行制御を行う運転支援制御を運転支援制御部69で実行する際に、道路状態取得部70で取得した道路の状態より目標軌跡演算部72で仮の目標軌跡を生成し、仮の目標軌跡より、走行抵抗であるコーナリングドラッグを走行抵抗推定部71で推定する。さらに、このコーナリングドラッグを利用して、目標軌跡演算部72で将来の目標軌跡を生成する。このため、生成する目標軌跡と実際の車両1の走行時の走行軌跡とのずれを低減することができ、車両1の走行制御を、車両1の実際の走行に沿った制御に近づけることができる。これにより、運転支援制御時における車両1の挙動のフィードバック量を低減させることができる。この結果、運転支援制御により車両1の走行制御を行う際の制御の追従性の向上を図ることができる。
(もっと読む)
車両の制御装置
【課題】実際のエンジントルクに応じた態様でオートマチックトランスミッションなどを制御する。
【解決手段】ピッチングおよびバウンシングなどの車両の上下方向の振動を低減するトルクを出力するようにエンジンを制御する制振制御が実行される。制振制御を中断した場合、制振制御を中断した後のエンジントルクの挙動が予測される。予測されたエンジントルクの挙動に応じて、オートマチックトランスミッションの変速が制御される。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、クラッチ出力軸36と、エンジンクラッチ35と、電動モータ22と、後車輪21と、差動装置23と、制御部と、を備える。クラッチ出力軸36は、エンジン2の駆動力を伝達する。エンジンクラッチ35は、エンジン2とクラッチ出力軸36との間に配置される。差動装置23は、クラッチ出力軸36からの出力と前記電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度及びエンジンクラッチ35の作動を制御する。そして、機体の前進時において、制御部は、クラッチ出力軸36からの出力を打ち消す方向にのみ電動モータ22を回転駆動することで、後車輪21への出力の変速を行う。
(もっと読む)
車両用走行制御装置及びその方法
【課題】車線逸脱防止制御が作動し、かつ4WD状態になっている場合に、それら車線逸脱防止制御の作動及び4WD状態を適切に終了させる。
【解決手段】車両用走行制御装置は、制駆動力を制御して自車両にヨーモーメントを付与し走行車線に対する自車両の逸脱を防止する車線逸脱防止制御が作動し、かつ前後輪の駆動トルクを制御する4WD制御が作動している場合において(ステップS51、ステップS52)、車線逸脱防止制御の作動が終了し、かつ4WD制御の作動が終了するときには、それら終了が同時になされることを禁止する(ステップS53〜ステップS56)。
(もっと読む)
21 - 40 / 158
[ Back to top ]