
Fターム[3D041AE31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 変速 (1,291) | 最適ギヤ段、最適変速比 (935)
Fターム[3D041AE31]の下位に属するFターム
Fターム[3D041AE31]に分類される特許
121 - 140 / 615
車両用動力伝達装置の制御装置
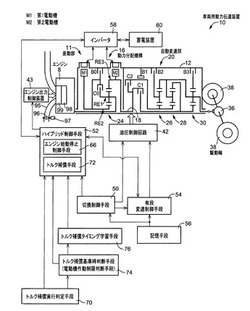
【課題】有段変速部を有する車両用動力伝達装置の制御装置において、変速ショックが大きくなる可能性を低減できる車両用動力伝達装置の制御装置を提供する。
【解決手段】トルク補償手段72は、トルク補償タイミング学習手段76によるトルク相補償制御の実行タイミングの学習が進行するほどトルク補償率を大きくする。そして、上記学習の進行度合いが低いほど、自動変速部20の出力トルクTOUTの落込みに対してその実行タイミングが時間的にずれ易いと考えられる。従って、上記落込みに対してその実行タイミングが時間的にずれる可能性が高い場合には上記トルク補償率がそれほど大きくはされないので、その時間的なずれが生じることがあるとしても、その時間的なずれに起因した上記トルク相補償制御の変速ショック低減効果への影響が低減され、変速ショックが大きなることの可能性を低減できる。
(もっと読む)
車両用動力伝達装置の制御装置

【課題】電動機によって差動状態が制御される電気式差動部と、動力伝達経路の一部を構成する変速部とを、備えた車両用動力伝達装置において、エンジン始動時に発生する歯打ち音の発生を抑制することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】変速比設定手段92は、エンジン停止時の第2電動機M2による走行中の自動変速部20の変速比を、第1電動機M1によってエンジン8を始動させるときの第1電動機M1の電圧波形に応じて設定するため、自動変速部20のギヤ比が好適に設定され、第1電動機M1によるエンジン始動時の歯打ち音を抑制することができる。
(もっと読む)
車両の制御装置
【課題】路面状態に応じた走行モードの切替中におけるドライバビリティの悪化を防止し、かつ、従来の車両に低コストで追加可能な、動力分配機構と連携した電子制御を行う車両の制御装置を提供すること。
【解決手段】ECUのCPUは、走行モードの入力があった場合(ステップS13でYes)、入力された走行モードに応じて動力分配機構の切替を指示し(ステップS14)、動力制御機構については、記憶した走行モードに応じて制御を行う(ステップS15)。動力分配機構の切替が完了したと判定した場合には(ステップS16でYes)、入力された走行モードに応じて、動力制御機構の特性を切り替えるが、動力分配機構の切替を指示してから、切替が完了しないまま一定の時間が経過したと判定した場合には(ステップS18でYes)、動力制御機構の特性を、記憶した走行モード(ステップS12)に対応する特性に維持する(ステップS19)。
(もっと読む)
ハイブリッド車両
【課題】回生制動中の制動力低下の抑制とモータ/ジェネレータの接続された変速機構内の各変速段間での変速段の切り替えの両立。
【解決手段】内燃機関10と、第1及び第2の変速機構40,50と、第1及び第2のクラッチ61,62と、第1変速機構40に連結したモータ/ジェネレータ20と、を備え、電子制御装置100に、第1及び第2の変速機構40,50から各々選択された各変速段の入力側と出力側の夫々の歯車を係合状態にする変速制御手段と、第1及び第2のクラッチ61,62を解放状態にして行う回生制動中にモータ/ジェネレータ20の回転軸と係合状態にある第1変速機構40の各変速段間で変速段の切り替えを行う場合、モータ/ジェネレータ20と係合状態にない第2変速機構50に係る第2クラッチ62を係合させるクラッチ制御手段と、を設けること。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者による制動操作中の減速抜けによるショックの発生および制動装置の耐久性の悪化を抑制する。
【解決手段】HV_ECUは、運転者の操作によるダウンシフト要求がなく(S100にてNO)、車両の周囲の状況に応じたダウンシフト要求があり(S104にてYES)、かつ、ブレーキが作動中である場合(S106にてYES)、ダウンシフト要求を拒否するステップ(S108)と、運転者の操作によるダウンシフト要求があるか(S100にてYES)、または、ブレーキの作動中でない場合(S106にてNO)、ダウンシフト制御を実行するステップ(S102)とを含む、プログラムを実行する。
(もっと読む)
車両の速度制御装置
【課題】車両がカーブを通過する際において、円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ内にて、車両の減速が完了する地点の基準となる基準地点Pcr、車速の維持が完了する地点の基準となる基準地点Pca、及び、車両の加速制限が完了する地点の基準となる基準地点Pcsが設定される。自車位置Pvhと基準地点Pc#との間の相対距離Lvh#がそれぞれ演算される。車両がPcrを通過するまではLvhrに基づいて演算される目標車速Vto1が、車両がPcrを通過した後はLvhaに基づいて演算される目標車速Vto2が、車両がPcaを通過した後はLvhsに基づいて演算される目標車速Vto3が、目標車速Vtoとして決定される。運転者が加速操作を行わない場合、車速が自車位置における目標車速Vtoを超えないように調整される。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電動機やその制御系に故障が生じて電気式差動部を非差動状態に切り換えるに際して、切換制御時に発生する駆動トルクの増加、または被駆動トルクの増加を低減することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】差動部11を非差動状態に切り換えるに際して、切換時に発生する駆動トルクの増加、または被駆動トルクの増加を低減する側に自動変速部20の変速比を変更する変速比変更手段80を備えるため、例えば、通常では差動部11の切換時に駆動トルクの増加、または被駆動トルクの増加が発生しやすい運転領域であっても、上記トルク増加が低減され、運転者に違和感を与えることを防止することができる。
(もっと読む)
車両の制御装置
【課題】 アクセルペダルの操作量に応じて機関出力を適切に制御し、アクセルペダルのバタ足操作が行われるような場合においても燃料消費率の悪化を抑制することができる車両の制御装置を提供する。
【解決手段】 アクセルペダル操作量AP及び車速VPに応じて要求駆動力パラメータAPREQが算出される。燃料消費率を抑制するエコ運転モードが選択されているときは、要求駆動力パラメータAPREQ及びエンジン回転数NEに応じてTHBEマップを検索することにより、スロットル弁の基本目標開度THBが算出される(S42,S43)。THBEマップは、要求駆動力パラメータAPREQの所定範囲において、同一のエンジン回転数NEに対応する基本目標開度THBEが一定となるように設定されている。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電動機と、その電動機に動力伝達可能に連結された変速部とを備える車両用動力伝達装置において、回生制御中に変速が実施されるに際して、トルク相中に発生する引き込み感を減少することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】回生制御手段実行中に自動変速部20の変速が実施されるとき、回生制御手段94は、自動変速部20のトルク相中において、自動変速部20への回生トルク(入力負トルク)を減少させるため、トルク相中に発生する回生トルク(入力負トルク)によって生じる引き込み感を減少させることができる。
(もっと読む)
車両用駆動装置の制御装置
【課題】電気式差動部と変速部とを備える車両用駆動装置において、変速部のダウンシフトとエンジンの始動とが重なって実行される際に、エンジンの始動と変速部の変速とを共に進行させつつ第1電動機の過回転を防止する。
【解決手段】自動変速部20のダウンシフトとエンジン8の始動とが重なって実行される場合は、第1電動機回転速度NM1が負側の第1電動機過回転速度NM1LIMに到達することが防止されるように、自動変速部20のダウンシフトと重なって実行されずエンジン8の始動のみが単独で実行される場合の出力トルクに比較して、第1電動機M1によるクランキングトルクTCM1を増大させると共に第2電動機M2による反力キャンセルトルクTCCM2を減少させるので、第2電動機回転速度NM2の上昇速度が抑制されることと相まって第1電動機回転速度NM1が確実に上昇させられて速やかにエンジン8が始動させられる。
(もっと読む)
車両の制御装置
【課題】複数の要求値の調停処理を繰り返して制御目標値を設定する車両において、要求値の追加あるいは削除を行なう際の調停処理ロジックの変更量を低減する。
【解決手段】この制御装置は、PDRM9010および複数の駆動力要求システム(9030〜9033)からの要求駆動力を調停する駆動力調停部9020と、ギヤ段変換部9110および複数のギヤ段要求システム(9130〜9132)からの要求ギヤ段を調停するギヤ段調停部9120と、トルク変換部9210および複数のトルク要求システム(9230、9231)からの要求トルクを調停するトルク調停部9220とを備える。さらに、この制御装置は、各要求システムで設定された要求値の各々に、各調停処理で共通して用いられる優先順位を付与するID付与部9300を備える。
(もっと読む)
車両用駆動装置の制御装置
【課題】車両走行中に何らかの故障により係合装置の伝達トルク容量が低下しても、機械式伝達部の入力系の回転部材や第2電動機等の過回転を抑制する車両用駆動装置の制御装置を提供する。
【解決手段】自動変速部20の入力部材の実際の回転速度NIN1と実際の車速V( 出力軸22の回転速度NOUT) および自動変速部20の変速比γに基づいて算出された理論入力部材回転速度NIN2( =γ×NOUT) との回転速度差ΔNINに応じて、エンジン8の出力トルクが制限されることから、車両走行中に何らかの故障により入力クラッチC1および/またはC2の伝達トルク容量が低下しても上記自動変速部20の入力系において入力クラッチC1および/またはC2よりもエンジン8側の回転部材およびそれに関連して回転する軸受、第2電動機等の過回転が抑制されるので、それら回転部材およびそれに関連して回転する軸受、第2電動機等の耐久性が確保される。
(もっと読む)
内燃機関の制御装置及び車両の制御装置
【課題】内燃機関の制御装置及び車両の制御装置において、製造コストの増加を抑制しながら内燃機関に発生する振動を低減可能とする。
【解決手段】内部で燃料を燃焼させることで発生した熱エネルギによりピストンを往復移動させて回転エネルギとして取り出すエンジン12と、モータ16による発電またはバッテリ31の蓄電により駆動可能なモータ19とを動力源として有し、エンジン12の燃焼により発生するトルク変動と、エンジン12におけるピストンの往復移動により発生するトルク変動とが互いに打ち消しあうように、エンジン回転数及びエンジン出力トルクを制御する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に違和感を与える制御を低減しつつ、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両の側方に存在する障害物を検出すると、所定時間後の自車両の将来位置を予測する。また、その予測した自車両の将来位置に基づき障害物に対するリスク度合いを算出する。そして、その算出した障害物に対するリスク度合いに応じて、障害物への接近を防止するように自車両を制御する。ただし、運転者の前記障害物と反対側の隣接車線への車線変更の意思を検出した場合には、障害物への接近を防止する制御を抑制する。
(もっと読む)
車両の制御装置及びその制御方法
【課題】渋滞中など車両が急発進できない状況にあるときには、電動ポンプを起動せずにエンジンを停止後エンジンを再始動させる第1の制御態様で制御し、上記以外の状況にあるときには電動ポンプを起動してエンジンを停止後エンジンを再始動させる第2の制御態様で制御するようにした車両の制御装置及び車両の制御方法を提供することである。
【解決手段】電動ポンプを装備した自動変速機を備え、車両の停止中に所定の停止条件成立時にエンジンの自動停止自動始動を行う車両の制御装置において、アイドル停止条件が成立したとき、車両の状況が急発進困難な状況のときは、電動ポンプを起動せずにエンジンを停止後再始動させる第1制御態様で制御し、急発進可能な状況のときは、電動ポンプを起動してエンジンを停止後再始動させる第2制御態様で制御する。
(もっと読む)
駆動力制御装置
【課題】エンジンおよび無段変速機が搭載された車両の駆動力を制御する場合に、定常走行時等の車内の不快なこもり音の発生を防止することが可能な駆動力制御装置を提供することを目的とする。
【解決手段】駆動力制御装置10は、定常走行状態の場合において、燃費最適線に基づいて算出したエンジン1の動作点がこもり音発生領域内にある場合に、燃費最適線に基づいてエンジンの第1の目標エンジン回転速度を算出し、当該第1の目標エンジン回転速度に基づいて無段変速機の変速比を制御する第1の変速比制御と、第1の目標エンジン回転速度よりも高くした第2の目標エンジン回転速度を算出し、当該第2の目標エンジン回転速度に基づいて無段変速機の変速比を制御する第2の変速比制御とを交互に不規則な周期で実行する。
(もっと読む)
駆動力制御装置
【課題】加速時にドライバビリティを悪化させることなく、燃費を向上させることが可能な駆動力制御装置を提供することを目的とする。
【解決手段】駆動力制御装置10は、アクセル開度と車速から目標駆動力を設定すると共に、目標駆動力を達成すべく、エンジン回転速度、エンジントルク、および無段変速機2の変速比を制御し、加速重視モードである場合には、燃費最適線に従って制御する一方、加速重視モードでない場合、すなわち、通常運転モードの場合には、燃費最適線よりもエンジントルクが低くなるように設定された目標動作線に従って制御する。
(もっと読む)
駆動力制御装置
【課題】吸気バルブの動作状態によらずに、燃費を向上させることが可能な駆動力制御装置を提供することを目的とする。
【解決手段】駆動力制御装置5は、アトキンソンサイクル運転時(VVT遅角)および通常運転時(VVT進角)で燃料消費率を算出し、アトキンソンサイクル運転時の燃料消費率と、通常運転時の燃料消費率とを比較して、燃料消費率が小さい運転状態を選択し、選択された運転状態のエンジン回転速度となるように無段変速機2の変速比を制御する。
(もっと読む)
121 - 140 / 615
[ Back to top ]