
Fターム[3E003AB05]の内容
Fターム[3E003AB05]に分類される特許
1 - 20 / 97
物品搬送装置
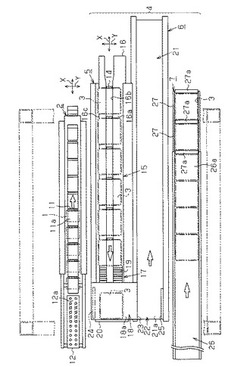
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
箱詰システム

【課題】箱詰めされる物品列の搬送中に物品列の姿勢を乱すことなく、かつ、物品列の姿勢を整えながら、物品列を搬送して箱詰めの充填効率を向上させる。
【解決手段】複数の物品M同士の側面が互いに接触して複数の物品が一列に並んだ物品列の底部を下方から支持する搬送面65と、物品列における側面に隣接する後端Mdを前方に向かって押すことで、搬送面上の物品列を搬送する押し部61と、搬送面上を搬送される物品列における搬送方向に直交する幅方向の両端の側面に接触して物品列を案内する一対の案内板80と、物品列から一部の物品が前方に突出するのを抑制する矯正部9とを備える。矯正部は、物品列の前端Mfに接触することが可能なバー91と、バーの端部においてバーに連なり水平軸線の回りに回転する一対のアーム92と、バーが接触位置PTと退避位置PAとの間を移動するようにアームを回転駆動させる第1駆動部63とを有している。
(もっと読む)
被包装物充填方法及び装置
【課題】挿入口を上向にして配置された包装容器内に複数の棒状の被包装物物を横向き姿勢で順次積み重ねた状態で容易且つ確実に、そして安定した状態で充填できる被包装物充填方法及び装置を提供する。
【解決手段】横向きの姿勢で供給される棒状の被包装物5を昇降ホッパー12内に順次受け入れて、昇降ホッパー内に位置する支持プレート20上へ順次積み重ね、その際、支持プレートは徐々に下方へ移動する。そして下降端位置に達する前に被包装物を昇降ホッパーの下部に設けられた支持バー24に引渡し、下降端位置に達した後、退避位置へ退避する。次いで昇降ホッパーは下方に位置した包装容器内に挿入され、容器の底近くの下降端位置に位置する。ここで、支持バーが解放位置へ移動して、被包装物が下方へ移動して包装容器内に充填される。そして、昇降ホッパーは容器から抜き取られる。
(もっと読む)
箱詰め装置
【課題】厚さが異なる複数種類の物品に共通に適用することができるとともに、物品把持位置を適宜設計することができる、箱詰め装置を提供する。
【解決手段】箱詰め装置の物品押込み装置は、複数の物品のそれぞれの上端部を把持する複数のチャック90a〜90dを有し、複数のチャック90a〜90dのそれぞれは、左右方向(第1方向)に直線状に移動可能に構成された第1把持部202及び第2把持部204と、第1把持部202及び第2把持部204を互いに近接又は離間する方向に移動させるエアシリンダ200とを有し、エアシリンダ200を構成するシリンダ及びピストンは、左右方向(第1方向)に延びて配置され、複数のチャック90a〜90dのうち、奇数番目に配置されたチャック90a,90cと、偶数番目に配置されたチャック90b,90dとは、前後方向(第2方向)にずれて配置される。
(もっと読む)
箱詰め装置
【課題】構造を簡素化して製造コストを低減できる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、複数の物品Tを列状に並べて整列させる物品整列装置14と、整列させられた複数の物品Tを列の側方に同時に押し出す物品押出し装置16と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を把持する複数のチャック90を有し、複数の物品Tを外装箱Uの内部に押し込む物品押込み装置18と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を複数のチャック90に押出し方向から案内する複数のアッパーガイド110とを備える。
(もっと読む)
箱詰装置
【課題】袋詰品を箱に隙間なく詰め込む。
【解決手段】箱詰装置は、載置面18aの両側に起立した一対の押圧体34,34によって、移送手段で載置面18aに段積みされた袋詰品12を両側から押圧可能な収容体18と、載置面18aに段積みされる袋詰品12の頭部を支持して、袋詰品12の姿勢を保つ支持手段44と、載置面18aに段積みされた袋詰品12を下方に抑える抑え体50と、収容体18の取出口18bに、開口10aを向けて箱10を配置する配置手段54と、収容体18を箱10に挿脱させる移動手段56と、取出口18bを下方に向けるように収容体18を回動する回動手段42とを備えている。
(もっと読む)
包装装置
【課題】包装袋の製造工程における手間やコストを縮減しつつ、被包装体の収容時における生産効率の低下を抑制できる包装装置を提供する。
【解決手段】包装装置1は、シート材を搬送する搬送機構110、搬送方向に沿ったシート材の第1側部6Cを、他方の第2側部6Dに沿うように、包装袋底部を基点にシート材を折る折り機構130と、シート材を交差方向CDに沿って一定間隔毎に接合して包装袋の側面を形成する接合機構150と、シート材を包装袋の側面に沿って切断する切断機構160と、収容手段からの包装袋の要求信号に応じて包装袋を供給するタイミング調整機構170と、を備える。
(もっと読む)
ヘッダ付連包袋の自動箱詰め方法及び装置
【課題】ヘッダ付連包袋を半分の長さに折り畳み、袋の表面を上にして箱詰めする作業を自動化するのに適した折り畳み方法、とそれを実現する装置を提供する。
【解決手段】袋搬送ベルトにより袋の裏面14を上にして搬送されてきたヘッダ付4連包袋を、二番目の袋3と三番目の袋4をバキュームボックス20の袋吸着孔に吸着固定し、折り返し爪21aを上方へ旋回させ、ヘッダ1及び一番目の袋を一番目の袋2と二番目の袋3との間で、上方へ折り返す。次に、折り返し爪21bを上方へ旋回させ、四番目の袋5を三番目の袋4と四番目の袋5との間で、上方へ折り返す。これにより、袋の表面を上にして折り畳まれたヘッダ付連包袋60が完成する。
(もっと読む)
連包袋体の折畳み供給装置
【課題】連包袋体を高速で折畳むことができる折畳み供給装置を提供する。
【解決手段】支持ピン13及び支持ピン16は、載置台2の供給位置Dから移換位置Bに到達する際に支持ピン13の間隔と支持ピン16の間隔とを夫々縮めながら支持ピン13が支持ピン16を搬送方向の上流側から下流側へ追い越して先行し、その移換位置Bにおいて連包袋体33を両小袋33a間の繋ぎ部分33cで折畳んだ後に、その移換位置Bの連包袋体33から離れて載置台2の供給位置Dに戻る。支持ピン13,16よりも下流側に配設された支持ピン20は、載置台2の移換位置Bで、支持ピン13,16が離れた連包袋体33を支持して、載置台2の送出位置に到達する際に支持ピン20の間隔を縮めながらその送出位置で連包袋体33を両小袋33a間の繋ぎ部分33cで更に折畳んだ後に、その送出位置の連包袋体33から離れて載置台2の移換位置Bに戻る。
(もっと読む)
選果システム
【課題】青果物の選果作業に携わる作業者の人数を減らすことができる選果システムの提供を目的とする。
【解決手段】青果物6が載せられたトレイ8を待機位置P1まで搬送するトレイ搬送装置53と、包装箱9を待受位置P2まで搬送する箱搬送装置71と、待機位置P1にあるトレイ8を待受位置P2まで移送する箱詰装置72と、制御装置80と、を備え、制御装置80は、トレイ搬送装置53によってトレイ8を待機位置P1まで搬送し、箱搬送装置71によって待受位置P2とトレイ8が詰められる第一の箱詰位置S1、第二の箱詰位置S2とが一致するように包装箱9を待受位置P2まで移送した後に、箱詰装置72によってトレイ8を待受位置P2に移送するように制御する。
(もっと読む)
箱詰め装置
【課題】必要数に満たない物品が外装箱の内部に収容されるのを防止することができる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、複数の物品Tと同数の物品検出センサ102を有し、物品押出し装置16による押出し動作の最中に複数の物品Tのそれぞれの有無を物品検出センサ102のそれぞれで検出する物品検出装置100と、警報を発生する警報発生装置とを備え、制御装置は、物品検出装置100が検出した物品Tの数が複数の物品Tの必要数に満たないときに、警報発生装置に警報を発生させる警報処理を実行する。
(もっと読む)
物品押込み装置及びそれを用いた箱詰め装置
【課題】開口部材を構成する枠部材どうしの間隔及び案内部材どうしの間隔を簡単かつ迅速に調整する。
【解決手段】物品押込み装置18は、シャッタ66と、テーブル102aと、物品押込み部70と、開口部材74とを備え、開口部材74は、第2開口W2のサイズを規定する第1枠部材120及び第2枠部材122と、第1案内部材124及び第2案内部材126と、第1枠部材120及び第2枠部材122の一方端部120a,122aどうしの間隔を調整する間隔調整機構128と、第1枠部材120及び第2枠部材122の他方端部120b,122bのそれぞれの動きを一方端部120a,122aのそれぞれの動きに追従させる追従機構130とを有する。
(もっと読む)
カートナー
【課題】不定形で扁平な物品を積み重ねた集積体を安定した状態で確実に箱詰めすることができるカートナーを提供する。
【解決手段】マスク等の扁平な物品を1枚づつ包装した不定形で扁平な軽量のピロー包装体を積み重ねた集積体PGを物品搬送経路上の供給位置αに供給する物品供給手段10と、供給位置αに供給された集積体PGを物品搬送経路に沿って搬送する物品搬送手段20と、胴部を筒状に開口したカートンCを挿入領域βに搬送するカートン搬送手段30と、集積体PGを物品搬送手段20によって搬送しながら物品搬送経路上の挿入領域βでカートンCに挿入する物品挿入手段40とを備えている。物品挿入手段40は、集積体PGを物品搬送経路の側方に押し出すプッシャ44と、挿入領域βで集積体PGを上方から押える押え手段48とを有し、押え手段48によって集積体PGを上方から押えながら、プッシャ44によって側方に押し出すようになっている。
(もっと読む)
箱詰め装置
【課題】製造コストやメンテナンスコストを低く抑えながら複数の物品を整列させることができるとともに、物品の姿勢の乱れを防止することができる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、第1物品T1及び第2物品T2をこの順で同一方向に連続的に搬送する物品搬送装置22と、第1物品T1を受け止めることによって、第1物品T1及び第2物品T2を所定の第1停止領域Q1及び第2停止領域Q2で次々と停止させる第1ストッパ部24aと、第1停止領域Q1より上方に第1物品T1に近接するように配置される第1押え部26aと、第2停止領域Q2より上方に第2物品T2に近接するように配置される第2押え部26bと、第1物品T1及び第2物品T2を第1停止領域Q1及び第2停止領域Q2から押し出す物品押出し装置58とを備える。
(もっと読む)
箱詰め装置
【課題】 箱詰め装置の構成を簡素化すること。
【解決手段】 押出装置7は、押出部材70を、進出動作において進出位置に進出した後、押出装置7が物品Wを外装箱Cに押し込むときまで進出位置に留めるよう構成する。
(もっと読む)
小袋連続体の折りたたみ装置
【課題】たるみを防止しながら、小袋における穴や破れの発生を防止し、高速で運転可能な小袋連続体の折りたたみ装置を提供することにある。
【解決手段】小袋連続体の折りたたみ装置は、複数の小袋が連なってなる小袋連続体を収納箱に折りたたむ小袋連続体の折りたたみ装置であって、小袋連続体を所定の位置から上記収納箱まで搬送するフィードローラ部2と、モータ37により駆動されるフィードベルト36とを備え、小袋連続体は、ベルト36の上を、ベルト36の駆動方向に沿って搬送され、ベルト36は、フィードローラ部2により搬送される小袋連続体にブレーキをかけるように駆動される。
(もっと読む)
バッグインボックス製造装置及び製造方法
【課題】多大な設備費や設置スペースを必要とせず、高速充填が可能なバッグインボックスの製造装置及び方法を提供する。
【解決手段】フレキシブルバッグをセットするリテーナーと、前記空のフレキシブルバッグをリテーナーにセットする手段と、前記リテーナーにセットされたフレキシブルバッグに液状内容物を充填する充填機と、前記フレキシブルバッグがセットされたリテーナーを充填機に搬入する手段と、充填されたフレキシブルバッグをリテーナーにセットした状態で搬出する手段と、充填されたフレキシブルバッグを収納する段ボールを製函する手段と、搬出されたリテーナーから液状内容物が充填されたフレキシブルバッグを製函された段ボールに移し替えて収納する手段と、液状内容物が充填されたフレキシブルバッグが収納された段ボールを封緘する手段と、空になったリテーナーを回収する手段と、を備えたことを特徴とするバッグインボックス製造装置。
(もっと読む)
箱詰め装置
【課題】物品を複数個まとめて箱詰めする際、物品の厚みや堅さといった属性に影響されず確実に箱に収めることができる箱詰め装置を提供する。
【解決手段】箱詰め装置10において、複数の物品1を順次搬入する物品搬入コンベア11から、物品1を移載ロボット12が取り上げ、バケット16、17に載置する。所定個数の物品1を受け止めたバケット16、17に、バケット16、17の一端の放出口の側から、梱包箱嵌合装置21が口の開いた梱包箱2を嵌合させる。その後姿勢変更装置45が、バケット16、17とその外側に嵌合された梱包箱2を、梱包箱2の口が上になるように姿勢変更させる。物品1はバケット16、17を出て梱包箱2に移る。姿勢変更したバケット17、18は高さがそのままに保たれた状態で、梱包箱2のみリフト装置46が降下させ、梱包箱2をバケット16、17から引き離す。
(もっと読む)
フレキシブルバッグ段ボール収納装置
【課題】ピンホールの発生がなく、また姿勢の不揃いがなく一定位置に収納することが可能なフレキシブルバッグの段ボール収納装置を提供する。
【解決手段】フレキシブルバッグを水平方向に搬送するコンベアA41と、フレキシブルバッグを上下のコンベアで挟み込んで保持するコンベアB42と、コンベアB42をフレキシブルバッグ収納位置まで移動する手段と、コンベアB42を傾斜させる手段と、段ボール44をフレキシブルバッグ収納位置まで搬送するコンベアC45と、段ボール44を傾斜させた状態で挿入する手段と、傾斜させた段ボールにフレキシブルバッグを搬送して収納する手段と、段ボールをコンベアB42の搬送方向の先端部から抜き取る手段と、傾斜したコンベアB42を水平状態に戻す手段と、フレキシブルバッグを収納した段ボールを移動する手段と、を備えたことを特徴とするフレキシブルバッグ段ボール収納装置。
(もっと読む)
ロボット、加工システム、及び加工品の製造方法
【課題】作業を省人化することが可能なロボット、加工システム、及び加工品の製造方法を提供する。
【解決手段】加工システム10は、物品を供給する物品供給部31と、被加工物を搬送する第1の搬送部22と、第1の搬送部22の下流側に設けられ、第1の搬送部22によって搬送された被加工物が載せられる作業台24と、予め教示された作業動作に従って、作業台24の上に載せられた被加工物に物品を用いた作業を施すロボット20と、作業台24の下流側に設けられ、ロボット20により作業が施された被加工物を搬送する第2の搬送部26とを備える。
(もっと読む)
1 - 20 / 97
[ Back to top ]