
Fターム[3E003CB06]の内容
容器詰包装操作 (2,738) | 制御手段及び制御対象 (190) | 被包装物品の移送機構を対象 (74)
Fターム[3E003CB06]に分類される特許
21 - 40 / 74
多色化粧料の製造方法
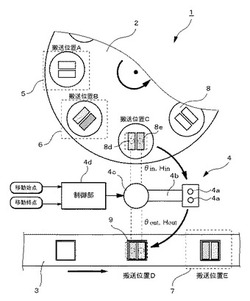
【課題】打型物を崩すことなく化粧皿への移し替えを可能にして、多色化粧料の生産ラインの自動化を図る。
【解決手段】移載機4は、移動始点θin,Hinで打型物を保持し、移動始点θin,Hinから移動終点θout,Houtに打型物を移動させ、移動終点θout,Houtで打型物を解放するという動作条件にしたがって動作する。これによって、搬送位置Cに存在する複数の打型物は、化粧皿9内における所定の収容位置に移動する。
(もっと読む)
パッケージの個別切り出し装置

【課題】パッケージを一個ずつ確実に切り出しする個別切り出し装置を提供する。
【解決手段】供給機構18から投入されるパッケージ群を個別に切り出して排出機構23によって排出される個別切り出し装置であって、前部ベルトガイド12及び後部ベルトガイド13と、前部ベルトガイド及び後部ベルトガイドに架け回されて回動する吸着ベルト14と、吸着ベルトを駆動する吸着ベルト駆動部15と、吸着ベルトの内周面に沿って仕切られパッケージを個別に収納するパッケージ収納部14bと、吸着ベルトを貫通して設けられパッケージ収納部に収納されたパッケージPを吸着保持するための貫通孔14cと、吸着ベルトの外周の一部を覆うように吸着ベルトの外周に沿って配置され、チャンバー吸引駆動部17を介してパッケージ収納部内を吸引する吸着チャンバー16と、吸着ベルトのパッケージ収納部に吸着されたパッケージの吸着を解除する吸着解除手段20と、を備えている。
(もっと読む)
箱詰装置
【課題】起立姿勢の物品群の箱詰を可能にする箱詰装置を提供する。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
(もっと読む)
ワーク収容補助装置
【課題】ワーク排出路から排出されて落下するワークが収容ボックスに既に収容されているワークに直接衝突することを防止することができ、しかも、ワーク排出路から順次排出される多数のワークを収容ボックス内の一箇所に山積みとならないように分散させて収容することができるワーク収容補助装置を提供する。
【解決手段】ワーク排出路1の末端1aから排出されるワークWを収容ボックス2に収容する際に用いられるワーク収容補助装置であって、可撓性を有するシート10と、シート10をワーク排出路1の末端1aの下方にて傾斜した姿勢で垂れ下がるように支持すると共に、シート10の姿勢を、収容ボックス2の一端2a側から他端2b側に向かって下方に傾斜するように垂下がる第一姿勢と他端2b側から一端2a側に向かって下方に傾斜するように垂下がる第二姿勢とで変化させるシート支持装置20とを備える。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 第1の所定個別回転方向において、第1の基準角度位置から第1の単位角度より小さい所定角度の位置までの第1の所定角度範囲における速度より所定角度の位置から第1の単位角度の位置までの第2の角度範囲における速度が低くなるように第1及び第2の羽根車21、22を回転させる。
(もっと読む)
箱詰め装置の物品投下構造
【課題】箱詰めされる物品を投下装置の物品載置部材上に複数並ぶように移送する移送装置の構成を簡素化する物品投下装置を提供する。
【解決手段】第1及び第2の羽根車21、22のいずれか一対の羽根の上に物品A1,A2が移動方向に並ぶようにベルトコンベア1の搬送速度を、物品が並ぶ順番に応じた速度に順次低下させるよう構成する。
(もっと読む)
箱詰め装置
【課題】箱詰め処理能力を向上することができるとともに、収容箱内における物品の位置の乱れを防止することができる、箱詰め装置を提供する。
【解決手段】箱詰め装置10は、一対の第2羽根車(物品支持部)60と第2回転手段(落下操作手段)とを有する第2羽根車装置(物品整列投下装置)42と、一対の第1羽根車90と第1回転手段とを有する第1羽根車装置46と、制御部50とを備え、一対の第1羽根車のそれぞれの第1羽根が複数の物品14を受ける回転位置にあるとき、第1羽根96における複数の物品を受ける物品受面Nは、移送方向に対する平行方向の一方端部が他方端部よりも低くなるように傾斜しており、物品受面の一方端部またはその近傍にはストッパ48が設けられている。
(もっと読む)
長物野菜の箱詰め装置
【課題】箱詰め装置における部品点数の削減とコンパクト化とを図る。
【解決手段】本願発明の箱詰め装置1は、上向き開放状の箱体Bが載置される載置台2と、前記箱体B内に移送される一段分の長物野菜Mを並列に載せる移載棚3とを少なくとも備える。前記移載棚3は、前記長物野菜Mの載る棚部17が前記箱体B内に向かう斜め下向きの傾斜姿勢となり得るように、前記載置台2の上方にある横軸19回りに回動可能な状態で、前記載置台2の上方に配置する。
(もっと読む)
メロンの箱詰装置
【課題】メロンを傾けてあり、箱内に形成したメロン収納空間の間の隙間が狭くても、果柄に邪魔されること無く、容易に箱へ入れることができるメロンの箱詰装置の提供。
【解決手段】果柄を上にして載せられたメロンBを搬送する搬送装置の末端部に設けたメロン待機部2と、メロン待機部2に隣接して設置した空箱待機部3と、メロンBを吸着・解放可能であり、メロン待機部2の上方と空箱待機部3の上方との間を往復可能、且つ、昇降可能な吸盤4とを備え、メロン待機部2を幅方向に傾斜させる傾動装置を設けると共に、空箱待機部3をメロン待機部2の傾斜角度に合わせて幅方向に傾ける揺動装置15を設けてある。
(もっと読む)
包装物品ハンドリング装置
【課題】包装物品を刺身の盛り付け状態のように並べるのに適した包装物品のハンドリング装置を提供する。
【解決手段】物品をピロー袋2に封入した縦横に比べて厚さの薄い包装物品1を、搬入コンベア10上に1列に並べて搬入する。移載ロボット30により三次元移動するピッキングヘッド20には、包装物品1を1個ずつ吸着する吸着具22が複数個、1列に並べて配置されている。制御装置31は、吸着具22を、搬入コンベア10上の包装物品1の中で、包装物品1の並びの方向において一方に偏った箇所に当て、吸着具22に真空吸引力を働かせる。ピッキングヘッド20を上昇させると、包装物品1は吸着具22から斜めに垂れ下がる。吸着具22の間隔を縮めると包装物品1同士に重なりが生じるので、その状態の包装物品1を目的地に置く。
(もっと読む)
姿勢制御装置
【課題】包装物を効率よく収納させる姿勢に制御させる姿勢制御装置を提供することである。
【解決手段】姿勢制御装置400においては、第1保持板410、第2保持板430を有する。第1保持板410、第2保持板430、第3保持板、一対の開閉装置440,441により略直立姿勢で集積された包装物800が集積方向の両側から保持される。また、包装物800をダンボール箱内に箱詰めする前に振動装置460により第1保持板410が矢印MV1の方向に往復移動され間隔が変動される。
(もっと読む)
段ボール箱詰めシステム
【課題】包装物である中身製品をできるだけ損傷させることなく均一化された袋包装体を実現し、形状の良い袋包装体を安定して集積し、集積した袋包装体を安定して段ボール箱内に挿入することで、低コストで省スペースな段ボール箱詰めシステムを提供する。
【解決手段】縦型の製袋充填包装機のような包装機10で製造された袋包装体Pは、背貼りシール部のある側が袋包装体の上側として、袋包装体の製造時には袋底側となる袋端部を搬送方向前方に向けて、搬送経路21が上り傾斜路となった上り傾斜搬送コンベヤ20で搬送される。袋包装体Pの製造途中で底側に沈んでいた(搬送方向前方に偏っていた)製品Sが、上り傾斜搬送コンベヤ20への移載の際に与えられる加速度によって自然に袋内で移動して均される。袋包装体は、そうした袋内での製品の偏りが解消された形状が良好な状態で、天地を逆に製函した段ボール箱B2に集積詰めされる。
(もっと読む)
間欠式物品挿入装置
【課題】プッシャ機構のワークエリアを小さくし、カートニングマシンの設計の自由度を高め、挿入効率も高める間欠式物品挿入装置を提供すること。
【解決手段】 物品挿入装置100は、コンベア201と202を用いてカートンCと物品Bとを同速で並進させ、その進行方向に直角な方向から物品BをカートンC内に挿入する装置であって、物品Bの上空に配した複数の掻込アーム121と、物品Bの載置間隔毎に前記複数の掻込アーム121を前記進行方向に直角な向きで一列に軸通する前記進行方向に配したアーム支持軸103と、アーム支持軸103を進行方向に移動させる並走用モータ105と、アーム支持軸103を進行方向に直角な方向に移動させる挿入用モータ106と、アーム支持軸103を軸回動して総ての掻込アーム121を一斉に上方に起き上がらせる軸動アクチュエータ107と、を具備する。
(もっと読む)
物品保持装置
【課題】物品10を保持する複数のグリップ部材26の相互の間隔を、簡単な構造で拡縮する。
【解決手段】ロボットハンド4に取り付けられるベース部材20に、5本のエアシリンダ22を一列に固定する。一端の第1エアシリンダ22Aは、ベース部材に直角に、その次の第2エアシリンダ22Bから第5エアシリンダ22Eまでを順次傾斜角度が大きくなるように傾斜させて固定する。全てのエアシリンダを収縮させてグリップ部材を上昇させた位置から、第5エアシリンダ22Eを伸張させて第5グリップ部材26Eを下降させて物品を保持した後、上昇させ、第4ないし第1グリップ部材26D〜26Aも順次下降、物品の保持、上昇をさせる。その後、一斉にエアシリンダ22を伸張させてグリップ部材26を下降させ、物品10の相互の間隔を接近させた後バケット14内に挿入する。
(もっと読む)
メロンの箱詰装置
【課題】果柄が真上からやや側方にずれるようメロンを傾けて箱内に収納することにより、メロン収納用の箱の高さを低くできるメロンの箱詰装置を提供すること。
【解決手段】果柄Dを上にして載せられたメロンBを搬送する搬送装置の末端部に設けたメロン待機部2と、メロン待機部2に隣接して設置した空箱待機部と、メロンBを保持・解放可能であり、メロン待機部2の上方と空箱待機部の上方との間を往復可能、且つ、昇降可能な吸盤とを備え、メロン待機部2を搬送装置の幅方向に傾斜させる傾動装置8を設けてある。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
物品投入装置および物品投入方法
【解決課題】板状をなす物品を整然と、しかも素早く包装袋に投入することのできる物品投入装置および物品投入方法を提供する。
【解決手段】物品投入装置1は、多数の物品3を、前方から後方に向けて順次ずれ重なった列状に集積する集積手段と、集積された物品3を一群にして、所定の速度で前方に投射する投入コンベヤ21と、包装袋4を、投射された物品3の軌道50に臨む開口状態にて把持する把持手段22と、を備えて構成されている。
(もっと読む)
物品スタッカー装置及び物品スタッカー方法
【課題】回収作業用搬送面上において複数個の物品を一括して取り上げて回収可能にして、回収作業能率を向上させることができる物品スタッカー装置及び物品スタッカー方法を提供することである。
【解決手段】ベルト搬送面に投入、載置された物品を無端ベルト1により投入位置から回収位置まで搬送する。ベルト搬送面の端部に配置した可動台2に載置された投入物品にエアー圧を加えてベルト搬送面上に物品を投入する。ついで、搬送方向に沿った物品長さより短い距離だけベルト搬送面を回収位置側に定寸移動させる。更に、所定数の物品を逐次投入して搬送面の定寸移動を繰り返し、隣接する物品の一部が相互に重合するように、物品どうしを一部重合配置させて、その重合物品群を回収位置側に移動して積層状態で寄せ集めて一括回収可能にする。
(もっと読む)
箱詰め装置
【課題】 物品の移送ミスが生じた場合にその移送ミスを検出することができたり、ステップモータが脱調したときにその脱調したことを検出することができる。
【解決手段】 導入コンベアにより整列コンベア58に搬送されてきた物品を、押し出しプレート11により予め定めた数ずつ押し出してこの押し出した物品をダンパー7上に移送して整列させ、この整列させた物品を外装箱2に詰める。押し出しプレート11が物品をダンパー7上に移送する移送位置に移動した後に元の待機位置に戻る方向に移動し始めてから押し出しプレート11が整列コンベア58上の次の物品を取り出す前までの間の所定のタイミングで、整列コンベア58とダンパー7との間に設けられている移送路77上に存在する物品を検出する物品センサ40aを設けてある。
(もっと読む)
21 - 40 / 74
[ Back to top ]