
Fターム[3F072KD19]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 旋回手段付 (35)
Fターム[3F072KD19]に分類される特許
1 - 20 / 35
パン型造粒機用の大塊処理装置
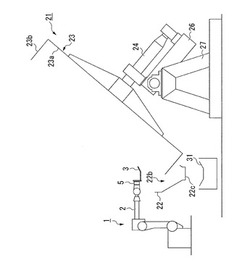
【課題】パン型造粒機において、その運転中に自動的に大塊を除去することが可能な塊処理装置を提供する。
【解決手段】回転して粉体を造粒するパン23が備えられたパン型造粒機21用の大塊処理装置1であって、大塊を掬い上げる掬上げ治具3と、先端に掬上げ治具3が着脱自在に取り付けられ、パン23の回転方向に沿って掬上げ治具3をパン23に挿入させて大塊を掬い上げさせるロボットアーム2と、を具備してなることを特徴とするパン型造粒機用の大塊処理装置1を採用する。
(もっと読む)
物品移載装置

【課題】 狭いスペースでも使用できる物品移載装置を提供する。
【解決手段】 フレームと、フレームに往復移動可能に設けられた移動体と、移動体の表面側と裏面側に周回されたベルトを備え、移動体はその駆動側を縦移動させて送り出すと先端側が先方に横移動し、駆動側を縦移動させて引き戻すと先端側が横移動して引き戻され、ベルトは周回方向任意箇所がフレームに固定されてリング状であり、移動体はその駆動側が縦移動する先端側が横移動し、ベルトは移動体の先端側が先方に横移動すると同方向に繰り出されてベルト先方の物品をベルトの上に掬い上げることができ、移動体の駆動側が縦方向に引き戻されて先端側が横方向に引き戻されると、その戻り方向に引き戻されてベルトの上の物品をベルトの先方に降ろすことができるようにした。
(もっと読む)
トレイ自動搬送システム及び移載装置
【課題】工業用酵素を生産するためのトレイをカセットに自動で積み込み/積み下ろしができかつ工業用酵素を生産する上での衛生面及び培養中の環境管理面に優れるトレイ自動搬送システム及び移載装置を提供することを課題とする。
【解決手段】工業用酵素を生産するためのトレイを自動で搬送するトレイ自動搬送システムであって、複数のトレイTを積載するカセットCは、上下方向に延びる四本の支柱と、対向する支柱間に上下方向に複数設けられた横材を有し、複数のトレイTをカセットCに積み込む移載装置2は、積み込み時にトレイTがカセットCの対向する位置に設けられた二本の横材に載置される前にトレイTが二本の横材間を移動するときにトレイTを支持部26aで支持する支持機構26を有することを特徴とし、複数のトレイTをカセットCから積み下ろす移載装置も同様の支持機構を有する。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
保持昇降装置
【課題】容器の全周を目視検査するために、その直径に関わらず容器を安定的に保持し、回転させ、昇降できる保持昇降装置を提供する。
【解決手段】保持昇降装置23は、昇降手段33が昇降部材37を下降させた状態で、開閉手段100が複数のローラ85,87の間を開き、キャリアカップ1に投入された容器7の上部を複数のローラ85,87の間に進入させ、開閉手段100が複数のローラ85,87の間を閉じることにより容器7の上部を複数のローラ85,87の間に挟着し、昇降手段33が昇降部材37を上昇させた状態で、回転駆動手段の駆動ローラの回転に従わせ容器7を回転させる。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
小袋投入装置
【課題】搬送コンベアと投入先とを離隔して製品への異物混入が防止でき、デッドスペースが少なく、連包パウチのカット位置が安定して傾きのない安定したカットラインが得られる、小袋投入装置を提供する。
【解決手段】小袋投入装置の搬送ライン20において、第1の搬送コンベア26で連包パウチ10を搬送部材26u・26dで上・下から挟み込んで水平方向に間欠的に搬送しる、前記カッター部28で、前記第1の搬送コンベア26によって搬送された連包パウチ10を搬送一時停止時に横シール部10aを切断して個々の小袋12に分け、第2の搬送コンベア30で、切断された各小袋12を載置して搬送し、吸着ユニット34で、前記載置台32上の小袋12を先端の吸引パッド34cで吸引して、前記搬送ライン20に平行かつ下方に位置し容器投入ライン36上を搬送される容器14内に投入する。
(もっと読む)
転送装置
【課題】本発明の課題は、柔軟性接着フィルムを転送する装置及び方法を提供することである。
【解決手段】本発明に係る装置は、ヘッド201を含み、第1の基板203から第2の基板204へ柔軟性シート素材202を転送する。前記ヘッド201は、前記第1の基板203及び前記第2の基板204に対して相対的に回転及び移動をすることができ、円筒状の湾曲部205を含んでいる。前記円筒状の湾曲205部は、外面207にわたって開口部206が設けられている。前記開口部206は、前記外面207に接触するシート素材202に空気圧を印加する。前記ヘッド201は、回転と移動の組み合わせによって、前記第1の基板203から前記第2の基板204へ前記シート素材202を転送する。
(もっと読む)
物体の移し替え装置
【課題】 直方体状の物体を、第1移送手段の第1容器から第2移送手段の第2容器に反転して適確に移し替えることが可能な物体の移し替え装置を提供する。
【解決手段】第1・第2移送手段2・4の間に、これらと同一方向へ指向するとともに回転中心線を同一にしかつ垂直面内で正逆回転可能に配設された2本の第1・第2回転軸9・10と、第1回転軸を正逆回転させる第1回転軸駆動手段11と、第2回転軸を正逆回転させる第2回転軸駆動手段12と、第1回転軸にこれと直交する方向へ延びて固着されて第1移送手段と第2移送手段の上方位置との間を旋回移動可能な第1回動部材13と、第2回転軸にこれと直交する方向へ延びて固着されかつ物体を第1・第2容器を介して第1回動部材とで挟持して第1移送手段から第2移送手段に旋回移動可能な第2回動部材14と、第1回動部材に装着されて第1容器をクランプする第1クランプ手段21と、第2回動部材に装着されて第2容器をクランプする第2クランプ手段28と、を備えたことを特徴とする。
(もっと読む)
移載装置
【課題】簡単な構造で一回の取出操作で移動する金属部品の数を増やして作業効率を向上させることができる移載装置を提供する。
【解決手段】磁性体である金属部品を収容する容器の近傍に設けられた移動機構と、移動機構に連結され任意の方向に移動するアーム部材を有する。アーム部材の先端部に取り付けられた電磁石36と、電磁石36に対して移動自在に取り付けられた磁性体の金属板38を備える。金属板38は、周縁部に凹部42と凸部44を備え、凹部42と凸部44が電磁石36の外側へ突出している。金属板38は、その中心を通過して一方向に長い長孔40を有し、電磁石36は、金属板38の長孔40に差し込まれて金属板38を摺動及び回転可能に係止する係止フランジ部46を備える。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
検査装置
【課題】容器を上下方向から挟み込む形式の検査装置において、容器を確実に検査ロータに搭載することができる検査装置を提供する。
【解決手段】内容物を充填した略円筒状の複数容器を外周に沿って設けられた検査ユニットに給送する検査ロータと、検査ロータ上で前記容器を上下方向から着脱自在に挟んで回転可能に保持する保持装置と、前記検査ロータに複数容器を搬入する容器収納部を有する搬入ロータと、検査後の容器を検査ロータから搬出する搬出ロータと、搬入ロータから検査ロータへの容器の搭載を案内するガイド部材を有し、前記検査ユニットで容器または容器内容物の状態を検査する検査装置において、搬入ロータに容器をガイド部材と搬入ロータの容器収納部に押圧する押圧部材を設け、押圧部材は前記容器を姿勢制御して検査ロータへ搭載する。
(もっと読む)
ワークの搬送・加工装置
【課題】高速で安定したレンズなどのワークの搬送動作を行うことのできる搬送機構を備えたレンズの搬送・加工装置を提案すること。
【解決手段】レンズの搬送・加工装置1では、第1旋回アーム11によって円弧状の移動軌跡に沿って第1レンズ搬送容器21を第1位置から第2位置に搬送し、第2旋回アーム12によって円弧状の移動軌跡に沿って第2レンズ搬送容器22を第2位置から第3位置に搬送している。剛体である旋回アーム11、12によってレンズ搬送容器22、23を搬送しているので、搬送中にレンズ搬送容器21、22が振動してそこに搭載されているレンズWa、Wbにズレが生ずることが無い。旋回アーム11、12によってレンズ搬送容器21、22を高速で移動させることができる。
(もっと読む)
搬送装置
【課題】部品を予め整列させなくても、搬送途中にサイクルタイムを悪化させることなく部品の姿勢を整えることが可能な搬送装置を提供する。
【解決手段】搬送装置1は、回転するベース部材30と、ベース部材30に対して周方向に沿って自転自在に複数配設されて部品を保持する保持部42と、ベース部材30に配設されて保持部42を自転駆動する保持部自転駆動手段43と、保持部自転駆動手段43を制御する保持部自転制御装置92と、を備え、受入領域12において保持部42に保持された部品が、ベース部材30の回転に伴って受入領域12から搬出領域13に搬送されると共に、保持部42の自転に伴って姿勢が整えられる。
(もっと読む)
搬送装置
【課題】搬送装置において、被搬送物と被搬送物を把持するグリップ部との互いの位置を調整可能とする。
【解決手段】搬送装置は、軌道(100)に沿って走行する走行部(210)と、走行部の下側に取り付けられており、鉛直方向に交わる表面を有する基準板(251)と、基準板に対向配置されると共に、表面に沿って回転可能なように基準板の下側に取り付けられた回転板(252)と、回転板に設けられており、被搬送物を把持するグリップ部と、回転板を前記基準板に対して回転させることで、グリップ部及び被搬送物間の位置調整を行う調整手段(255、257、258)とを備える。
(もっと読む)
可動装置及び物品搬送装置
【課題】所定平面内における第1の方向の駆動用と第1の方向に対して垂直な第2の方向の駆動用とで駆動モータを別々に設ける必要がなく、且つ独立した傾動機構を設けることなく手先部分を傾動させることを可能とする。
【解決手段】可動装置(物品搬送装置10A)は、ベース部12に基端部が連結された第1リンク21、第2リンク22、及び第3リンク23と、第1リンク21、第2リンク22、及び第3リンク23の先端全てに連結された一つの出力部材24とを有し、第1リンク21、第2リンク22及び第3リンク23の駆動状態により、ベース部12に対する出力部材24の所定平面上の相対的な位置及び姿勢が定まるパラレルリンク機構20と、パラレルリンク機構20の出力部材24に取り付けられたツール40(物品把持部40A)と、を備える。
(もっと読む)
小物部品供給装置
【課題】安定動作が可能な小物部品供給装置を提供する。
【解決手段】ナット供給装置100は、ナット300を上部可動電極200の下端部201に供給する。可動シュート6の先端部61は、上部可動電極200が上昇位置にあるときの上部可動電極200の下端部201の近傍下方に位置する。可動シュート6の先端部61は、一対の分割片62が互いに接近又は当接した状態にあるとき、上流側から送給されてきたナット300を受け止め上部可動電極200の下端部201への移し替えを可能にするナット受部(部品受部)を形成し、かつ、一対の分割片62が互いに離隔した状態にあるとき、上部可動電極200の下降201を可能にする空間を形成するよう構成される。
(もっと読む)
容器搬送装置
【課題】電子線殺菌装置に使用した場合に、電子線の照射位置で容器2を自転させる必要を無くし、処理能力を向上できるようにする。
【解決手段】両端にネックグリッパ4が取り付けられた主軸部材30に、その軸線と直交する方向を向けて固定連結部材32を固定し、その外周に回動可能に回動連結部材36を取り付け、一つの主軸部材30の固定連結部材32と隣接する主軸部材30の回動連結部材36とを、主軸部材30の軸線と直交する線を中心に回転できるように連結する。これを連続して無端状搬送体6を構成する。2つのスプロケット8、10および円弧状ガイド12、14と直線ガイド16、反転ガイド18で循環移動経路20を構成する。主軸部材30に設けた上下左右のローラ44、46、52、54を、反転ガイド18のカムレール18a、18b、18c、18dに係合させて反転させる。
(もっと読む)
ワーク取り出し方法及びワーク取り出し装置
【課題】各パレット間でその高さ及び幅に寸法誤差があってもパレットからワーク取り出し装置でワークを取り出す作業を自動化する。
【解決手段】第1のパレット4の支柱8に形成されたカム溝に軸をスライド自在に係合させて略水平状態となる第1の状態とガラス3を取り出せる跳ね上げ状態となる第2の状態との間で開閉自在とされる仕切板9を複数有し、略水平状態となる第1の状態にある各仕切板9の上にガラス3を平置きして該仕切板9と該ガラス3とを交互に段積みしてなるパレット4からガラス3を取り出すワーク取り出し装置。このワーク取り出し装置7では、第1の状態にある仕切板9の下に入り込んでこの仕切板9を跳ね上げ、該仕切板9を前記ガラス3が取り出せる状態となる第2の状態とする跳ね上げ部材と、仕切板9が跳ね上げられることにより取り出し可能とされたガラス3を保持する吸着保持機構部と、を備える。
(もっと読む)
基板を分離搬送する装置及び方法
【課題】 本発明は特に、ソラーウェハなどのディスク状基板(102;202)の分離及び搬送に関する。
【解決手段】 本発明は、分離が流体中で行われ、薄い流体膜に基づく付着力がグリッパ(108;208)と分離すべき基板(102;202)の間で発生し、基板をグリッパ(108;208)に付着可能とすることを特徴とする。
送り方向(105;205)と直交する方向、特に基板(102;202)の平面形状と平行な方向に沿ったアンローディングにより、極めて優しい取り扱いで且つ効率的なディスク状基板(102;202)の分離が、短いサイクル時間で可能となる。
(もっと読む)
1 - 20 / 35
[ Back to top ]