
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
181 - 200 / 1,659
表示装置、表示制御方法、プログラム及び電子機器
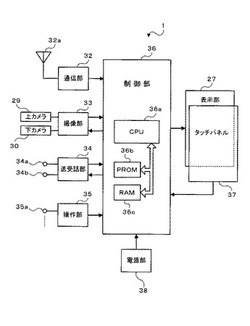
【課題】 ハンドミラー利用時の被写体の目線ずれの修正をより違和感なく行う。
【解決手段】 表示部(27)の表示画面の対向二辺に接近して配置され且ついずれも表示画面を見ている人物の顔を撮影可能な第一のカメラ(29)と第二のカメラ(30)を備えた表示装置(20)において、第一のカメラで撮影したカメラ目線画像を登録する登録手段(36a)と、第一のカメラ及び第二のカメラで撮影した非カメラ目線画像と登録済みのカメラ目線画像とに基づいて目線ずれ量を割り出す割り出し手段(36a)と、割り出された目線ずれ量に基づいて非カメラ目線画像の目線を修正する修正手段(36a)と、目線が修正された目線修正済み画像を表示部(27)に表示する表示制御手段(36a)とを備える。
(もっと読む)
画像処理装置および距離計測装置

【課題】撮影シーンに応じた立体表示を実現することが可能な技術を提供する。
【解決手段】画像処理装置は、撮影領域における被写体までの距離計測を、撮影領域に設定された予備計測位置において行って、距離情報を取得する第1距離計測部12と、第1距離計測部12で取得された距離情報に基づいて、撮影領域における被写体までの距離計測を追加して行うための本計測位置を撮影領域において設定する設定手段と、本計測位置において距離計測を行って、距離情報を取得する第2距離計測部13と、第1距離計測部12および第2距離計測部13で取得された距離情報に基づいて、視差情報を生成する視差情報生成部15と、視差情報に基づいて立体画像を生成する立体画像生成部16とを備える。
(もっと読む)
車両検知システム
【課題】閾値処理により誤検知を抑制し、かつ、ヒストグラムによる統計量を用いて高精度な検知もしくは測定を行う。
【解決手段】対象物の車両の三次元画像を取得する三次元画像撮像装置1と、三次元データの誤検知軽減のための閾値処理を行う三次元データ閾値処理装置11と、閾値処理された三次元データを用いて車両の検知を行う車両検知装置12と、閾値処理後の三次元データを用いて奥行距離ヒストグラムを作成し、作成されたヒストグラムから、並走の有無を検知する並走検知装置13と、閾値処理後の三次元データを用いて高度ヒストグラムを作成し、作成されたヒストグラムから、車高を測定する車高測定装置14とを備えている。
(もっと読む)
医用画像処理装置、医用画像撮影装置及び医用画像処理プログラム
【課題】疾患の診断を容易に行うことが可能な医用画像処理装置を提供する。
【解決手段】医用画像処理装置は、形態特定手段と、機能算出手段と、表示処理手段とを有する。形態特定手段は、医用画像撮影装置によって被検体を撮影することにより得られた医用画像データから前記被検体の心筋の厚みまたはその周辺部位の厚みに関する形態情報を特定する。機能算出手段は、医用画像データに基づいて被検体の心筋の動きに関する心機能情報を算出する。表示処理手段は、特定された形態情報と算出された心機能情報との組み合わせを色で表して表示手段に表示させる。
(もっと読む)
画像処理装置、画像処理方法、画像処理装置の制御プログラム、および当該プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】簡易な構成により、画像の一部または全部の鮮明度を低減する(ぼかす)処理を行う画像処理装置を実現する。
【解決手段】画像処理装置101は、距離画像センサ107が撮像した物体までの距離が画素毎に記録されている距離画像データを構成する画素の画素値を画素毎に取得し、該取得した画素値を画素毎に所定閾値と比較する距離画像データ解析部104と、当該比較の結果、距離が所定閾値を超えると判定された画素に対応する、カメラ106が撮像した撮像画像データを構成する画素の画素値に対して、所定演算を行う画像処理部103とを備える。
(もっと読む)
画像処理方法および画像処理装置
【課題】顔領域など特定領域の検出に要する演算量を画像状況に応じて最適化する機能を、被写体の前後動作やズームアップ・ズームアウトの操作に際しても有効化し、演算量削減効果を可及的に高いものにする。
【解決手段】距離算出ステップn10において、順次入力されてくる画像データにおいて距離情報を算出し、距離比較ステップn20において、現在フレーム画像データおよび過去フレーム画像データについてそれぞれ距離算出ステップで得られた距離情報を比較し、特定領域検出用パラメータの設定ステップn30において、距離比較ステップにおける比較結果に基づいて特定領域検出用のパラメータを設定し、特定領域検出ステップn40において、特定領域検出用パラメータの設定ステップにおいて設定された特定領域検出用のパラメータに基づいて特定領域を検出する。
(もっと読む)
立体映像表示装置および立体映像表示方法
【課題】立体映像の観察のための集中を楽にし、重畳画像の確認をしやすくする。
【解決手段】信号入力部101は立体映像信号を含む信号を取得する。左右映像分離部102は、信号入力部101が取得した立体映像信号を左目用映像信号と右目用映像信号に分離する。拡大縮小部104は拡大縮小のそれぞれの中心を基準点として左目用映像信号と右目用映像信号を変更する。左右映像合成部105は拡大縮小部104が拡大または縮小した左目用映像信号と右目用映像信号を合成する。表示部106は左右映像号合成部105が合成した立体映像信号を表示する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】水平方向又は垂直方向に1/2サイズに圧縮された2つの画像からなる一組のステレオ画像に対して、フレーム間統合型高解像度化処理に比べて簡単な動き推定に基づく高解像度化処理を行って高画質で本来のサイズのステレオ画像を得る。
【解決手段】垂直輪郭判定部11は、入力SBS画像の被高解像度化画像に垂直輪郭が存在するかどうかを判定する。垂直輪郭が存在しないときは、y_r照合探索部13は、入力SBS画像の被高解像度化画像の画素から生成した中間画素から構成したブロックを用いて、参照画像上でパターンの一致する場所をベクトル探索する。y_r候補値決定部14は、y_r照合探索部13の探索結果に基づいて、対応する参照画像の画素の画素値を中間画素y_rの候補に決定する。y_r補間処理部15は、中間画素y_rの画素値に基づいて、入力SBS画像を復号したステレオペア画像を生成する。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつ車両毎の走行状態の分析を負荷が集中することなく行うことができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25を有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】立体視画像を有するコンテンツを簡易に作成することが可能な、新規かつ改良された画像処理装置を提供する。
【解決手段】複数の平面画像を作成し、作成された複数の平面画像のそれぞれに奥行き方向の仮想的な距離を設定する。その作成された複数の平面画像に設定された仮想的な距離に基づいて、それぞれの平面画像中のオブジェクトの空間位置を設定した立体視画像に変換した立体視画像のデータを得る。そして、複数の平面画像を作成する編集画面を表示する。その編集画面は、複数の平面画像を個別又は重畳して表示させると共に、平面画像のそれぞれにタブを付与して表示させる。
(もっと読む)
立体画像編集装置および立体画像編集方法
【課題】出力後に編集時と異なるサイズとなる立体画像の編集時には、画像製作者が飛び出し量または引き込み量を適切な値に設定できない場合がある。
【解決手段】プリントされる立体画像のサイズに基づいて、プリントされる立体画像のサイズで表現可能な飛び出し量の範囲を表示し、表示される立体画像のサイズに基づいて、表示される立体画像のサイズで表現可能な飛び出し量の範囲を表示したため、プリントされる立体画像で表現可能な飛び出し量の範囲を表示部で確認しながら立体画像を編集することができる。
(もっと読む)
医用画像処理装置、及び医用画像処理プログラム
【課題】複数の部位を容易に比較できる医用画像処理装置を提供する。
【解決手段】この実施形態に係る医用画像処理装置は、設定手段と第1の画像生成手段と第2の画像生成手段と表示制御手段とを有する。設定手段は、ボリュームデータに対して第1のクリッピング面と第2のクリッピング面とを設定し、ボリュームデータに対して第1の視線方向と第1の視線方向とは反対方向の第2の視線方向とを設定する。第1の画像生成手段は、第1のクリッピング面から第1の視線方向に向かって見える第1の医用画像をボリュームデータに基づいて生成する。第2の画像生成手段は、第2のクリッピング面から第2の視線方向に向かって見える第2の医用画像をボリュームデータに基づいて生成する。表示制御手段は、第1の医用画像と第2の医用画像とを並べて表示手段に表示させる。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
立体映像変換装置及び立体映像表示装置
【課題】立体視用の映像を表示する際に、画面サイズによらず引っ込み方向の視差量を、所定の視差以下で表示することができる立体映像変換装置を提供する。
【解決手段】立体映像変換装置100は、左右映像を撮像した際の撮像条件である輻輳角変換情報を抽出する撮像条件抽出部111と、左右映像を撮像した際の輻輳角を変更する映像変換部112とを備える。映像変換部112は、撮像条件抽出部111で抽出された輻輳角変換情報及び左右映像を表示させる表示画面の表示サイズ情報に基づいて、左右映像の最大視差量を算出し、算出した最大視差量が予め指定された最大視差量以下となる輻輳角補正値を算出する輻輳角補正値算出部と、算出した輻輳角補正値に基づいて左右映像を撮像した際の輻輳角を変更させた映像を生成する輻輳角変換処理部とを備える。
(もっと読む)
医用画像処理装置及び制御プログラム
【課題】欠損孔の治療に有効なナビゲーション画像データの生成及び表示。
【解決手段】医用画像処理装置100は、患者から予め収集されたボリュームデータに基づいて、心腔内に挿入されたカテーテル先端部に対する安全領域、心腔壁の欠損孔に対する前記カテーテル先端部の好適な挿入方向あるいは挿入タイミングの少なくとも何れかをナビゲーションデータとして生成するナビゲーションデータ生成部1と、前記カテーテル先端部が挿入された前記患者に対するX線撮影によって収集されるX線画像データに前記ナビゲーションデータを重畳してナビゲーション画像データを生成するナビゲーション画像データ生成部2と、前記ナビゲーション画像データを表示する表示部3とを備える。
(もっと読む)
パノラマ画像表示装置およびパノラマ画像表示方法
【課題】パノラマ画像に写された空領域に何らかの視覚効果を与えることが望ましい。
【解決手段】
マスク領域抽出部11は、パノラマ画像内のマスクすべき領域を抽出する。マスク処理部12は、パノラマ画像内のマスクすべき領域をマスクしたパノラマ画像を生成する。位置合わせ部20は、前記天球画像の方向を前記パノラマ画像の撮影方向に合わせる。マッピング処理部14は、マスク処理後のパノラマ画像および天球画像をテクスチャとして3次元パノラマ空間にマッピングする。3次元画像生成部16は、パノラマ画像の撮影場所を視点位置として、3次元パノラマ空間を指定された視線方向に見たときの3次元パノラマ画像を生成する。
(もっと読む)
画像処理装置及び画像処理システム
【課題】画像領域境界付近での距離誤差を低下させ、立体画像における遠近視認上の違和感を軽減させる画像処理技術を提供する。
【解決手段】立体画像を生成しようとする被写体の2次元画像上でエッジを抽出し、エッジで囲まれた各領域の相互境界QM付近で距離画像の補正を行う。このような領域境界では、遠近競合によって一方の領域CAの距離情報に他方の領域RAの距離情報が混入していることから、領域境界QMに近づくにつれて他方領域の距離情報の値へと変化しようとする傾向になり、それが誤差の原因となる。そのような誤った変化を抑圧すべく、領域境界QMの近くの画素であって、距離情報の変化が大きな画素については、距離情報の変化を抑制するような補正を行う。
(もっと読む)
車線推定装置
【課題】二重白線等、走行車線の内外に、走行車線と誤認し易い車線候補点が断続的にプロットされた場合であっても、走行車線を連続して推定することができて、安定した運転支援を行うことができるようにする。
【解決手段】前回求めた走行車線の内側エッジを推定する仮想線に基づいて今回の予測標準線LpL,LpRを求め(S12)、この予測標準線LpL,LpRと車線境界をプロットする第1候補点P1の点列との一致度を求め(S13)、第1候補点P1が最も一致度が高いと判定した場合、この第1候補点P1の点列を今回の主候補点Pmの点列として設定する(S18)。そして、この主候補点Pmの点列に基づき曲線近似式(y=ax2+bx+c)から、今回の走行車線の内側エッジを推定する仮想線Lsを求める。
(もっと読む)
操作判定装置、指先検出装置、操作判定方法、指先検出方法、操作判定プログラム、及び、指先検出プログラム
【課題】ユーザにとって容易なジェスチャにより、クリック操作が行なわれたと判定する操作判定装置を提供する。
【解決手段】指先50が大体静止した状態になった場合に、最新の指先50を中心とした矩形範囲52を設定する(S2000)。最新の指先50から一定距離内に過去所定数分の指先50が存在する場合に、指先50が大体静止した状態であると判断される。矩形範囲52の設定から一定時間TC以内に、矩形範囲52から指先50が消失し、矩形範囲52に指先50が存在しない状態になり(S2002)、そして、再び、矩形範囲52に指先50が出現し、矩形範囲52に指先50が存在する状態になった時に(S2004)、シングルクリックが行なわれたとみなす。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】複数の視差候補の中から最適な視差を精度よく選択することができる画像処理装置等を提供する。
【解決手段】画像取得部11は、同一被写体について視差のある2つの画像を取得する。特徴点候補取得部12は、画像取得部11により取得された一方の画像から特徴点候補を取得する。視差候補取得部13は、ステレオマッチングを行い、他方の画像から特徴点候補毎の視差候補をそれぞれ取得する。特徴点選択部14は、取得された特徴点候補の中から所定の条件を満たすものを特徴点として選択する。隣接点取得部15は、特徴点選択部14により選択された特徴点に隣接する隣接点を、特徴点毎にそれぞれ取得する。視差決定部16は、特徴点と、視差候補と、隣接点と、に基づいて、確率伝搬法によるアルゴリズムを用いた処理を実行し、各特徴点に対応する視差を決定する。
(もっと読む)
181 - 200 / 1,659
[ Back to top ]