
Fターム[5B080CA00]の内容
イメージ生成 (11,603) | システム (1,367)
Fターム[5B080CA00]の下位に属するFターム
Fターム[5B080CA00]に分類される特許
21 - 40 / 215
AdobeFlash(登録商標)によるSWF形式の画像表現をHTML形式の画像表現に変換するコンピューター情報処理の方法、プログラム

【課題】Adobe Flash(登録商標)により作成されたSWF形式の画像表現をHTML形式の画像表現にコンピューターにより自動変換する。
【解決手段】緑領域と赤領域の境界線である「方向付き線」9と10には、右側「塗りスタイル」(赤色)と左側「塗りスタイル」(緑色)の両方の記述が対応付けされている。「方向付き線」9と10をそれぞれ9a・9bおよび10a・10bに二重化したのに伴い、その一方の「方向付き線」9aと10aに左側「塗りスタイル」(緑色)を対応付けするとともに、他方の「方向付き線」9bと10bに右側「塗りスタイル」(赤色)を対応付けする。
(もっと読む)
描画処理装置

【課題】写実的で自然な実写画像とCG画像の合成画像を生成できる描画処理装置を提供する。
【解決手段】基本的には,実写画像の3次元空間における対象物までの奥行き値を検出し,検出した奥行き値に基づいて,例えば,ぼけ処理や,輪郭強調処理,動き強調処理のような後処理を行う。具体的には,同一の対象物を異なる視点において撮影した複数の実写画像に基づいて奥行き値の検出を行うため,例えば実写画像の視差に基づいて奥行き値を検出できるため,奥行き値の演算がより正確になる。また,奥行き値の検出処理に際して,異なる視点の複数の実写画像を用いることにより,生成された合成画像は,両眼の視差によって立体映像を表示する立体ディスプレイに好適に表示できる。従って,より写実的で自然な合成画像を生成できる。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】より効果的に立体を表現することができる画像処理装置、及び画像処理方法を提供する。
【解決手段】付加情報に基づいて第1の深度を決定し、前記第1の深度に基づいて第2の深度を計算する深度計算部と、前記付加情報に基づいて第1のオブジェクト画像を生成し、前記第1のオブジェクト画像と前記第1の深度とに基づいて、第1の立体視画像を生成する第1の立体視画像生成部と、前記付加情報に基づいて第2のオブジェクト画像を生成し、前記第2のオブジェクト画像と前記第2の深度とに基づいて、前記第1の立体視画像と少なくとも一部が重なる位領域に表示される第2の立体視画像を生成する第2の立体視画像生成部と、前記背景画像を表示し、表示された前記背景画像より前面に前記第2の立体視画像を表示し、前記画像合成部により生成されたビデオ信号を出力する出力部と、を具備する。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】 より効果的に立体を表現することができる画像処理装置、及び画像処理方法を提供する。
【解決手段】 一実施形態に係る画像処理装置は、背景画像を生成する背景画像生成部と、付加情報を受け取る受取部と、前記付加情報の種別毎に深度を予め記憶する深度記憶部と、前記受取部により受け取った付加情報の種別を判別し、判別した前記種別に対応付けられている深度を前記深度記憶部から読み出す深度決定部と、前記付加情報に基づいてオブジェクト画像を生成し、前記オブジェクト画像と前記深度決定部により読み出された深度とに基づいて、立体視画像を生成する立体視画像生成部と、前記背景画像を表示し、表示された前記背景画像より前面に前記立体視画像を表示してビデオ信号を生成する画像合成部と、前記画像合成部により生成されたビデオ信号を出力する出力部と、を具備する。
(もっと読む)
地物の外観表示用画像の生成方法及びその装置
【課題】撮影した写真の編集を伴わず地物の概観表示用画像の生成を実現する。
【解決手段】コンピュータ上に用意された仮想空間において、地物の三次元モデルをその地物が存在する場所と同じ経度緯度で仮想空間内に配置し、仮想空間内の視点を写真撮影時の位置及びパラメータに基づいて設定することにより、写真撮影したときの地物のカメラの関係と、仮想空間内での地物の三次元モデルと視点の関係が一致させることができ、撮影時の状態を仮想空間内で再現することができる。仮想空間内に設定した視点から地物の三次元モデルに向かって、写真撮影した電子データに記録されている各画素をその画素色を光源色として投影すると、写真が投影された地物の三次元モデルを地物三次元モデルの所定方向から当該地物が収まる画角でレンダリングし、レンダリング画像を該地物の概観表示用画像とする。
(もっと読む)
3次元環境生成システム
【課題】大規模点群データのCGモデルへの置き換えを、少ない計算量及び少ない誤差で行う。
【解決手段】環境内の3次元形状を計測した反射強度付き点群データと、マーカ付き3次元CGモデル群を入力し、前記反射強度付き点群データから算出したマーカ配置と、入力したマーカ付き3次元CGモデル群のマーカ配置との照合処理により、類似配置のマーカを持つ3次元CGモデルを抽出するモデル候補抽出部と、反射強度付き点群データから算出したマーカ配置に、前記抽出マーカ付き3次元CGモデルのマーカをあわせることにより、最も照合誤差の少ない3次元CGモデルを該当3次元CGモデルとして、3次元環境モデルとして出力する点群-CG置換部、とを備える。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部106を備える。
(もっと読む)
物体形状生成装置及び方法
【課題】3次元モデルを入力データとして取得できる距離画像から自動的に生成する。
【解決手段】本実施形態によれば、物体形状生成装置は、画像入力装置と、形状抽出部と、接続情報算出部と、画像処理部を備えた構成である。画像入力装置は、対象物体の複数の距離画像を取得する。形状抽出部は、前記各距離画像を使用して、前記対象物体を構成する各部分の形状情報を抽出する。接続情報算出部は、前記各部分の相対位置及び角度を表す座標情報を含む接続情報を取得する。画像処理部は、前記形状情報及び前記接続情報に基づいて、前記対象物体の3次元モデルを生成する。
(もっと読む)
模擬画像生成装置
【課題】大気条件に依存せずに、背景画像と目標モデル画像を融合する際に生じる画像間の不整合を低減する。
【解決手段】3Dモデルに対して光線追跡処理を行い高分解能撮像画像データを生成する光線追跡処理部(11)と、広域撮像画像データおよび高分解能撮像画像データに対して解像度劣化処理を行う光学センサ特性付加部(12)と、解像度劣化処理後の両画像データに対して反射率データを用いた反射率変換処理を行う反射率変換部(13)と、反射率変換処理後の両データを合成した反射率画像データを生成する反射率画像融合処理部(14)と、反射率画像データに対して大気条件データを考慮した画像データを生成する光波伝搬処理部(21)と、光学センサの雑音量を付加する光学センサ雑音付加部(22)と、量子化処理を行って目標撮像模擬画像を生成する量子化処理部(23)とを備える。
(もっと読む)
情報表示装置及びプログラム
【課題】学習効果を高める。
【解決手段】関数電卓1は画像データ133、当該画像に設定されたXY座標系の範囲を示す座標範囲データ138及び画像内の解析対象点のXY座標値を示す座標値テーブルデータ135を有する画像ファイル132を記憶する記憶部13と、指定画像データ133Sの画像のうち少なくとも一部の画像部分を左側表示領域3Aに表示させ、指定座標範囲データ138Sにおいて当該画像部分に設定された範囲のXY座標系を左側表示領域3Aに設定し、この座標系のうち指定座標値テーブルデータ135Sで示される位置にプロット点Pを表示させるCPU11を備える。座標値テーブルデータ135はXY座標値にT軸の座標値を対応付け、CPU11は右側表示領域3BにTXまたはTY座標系を設定し、この座標系のうち指定座標値テーブルデータ135Sで示される位置にプロット点Pを表示させる。
(もっと読む)
顔画像処理装置
【課題】不適切な照明環境で撮影された顔画像か否かを判定可能な顔画像処理装置を提供する。
【解決手段】顔画像処理装置1は、対象者の顔を撮影して入力顔画像を作成する撮像部2と、人物の顔の形状を表す3次元顔形状データとを記憶する記憶部4と、入力顔画像に含まれる対象者の顔領域に、その対象者の顔の構造以外に起因する陰影に対応する陰影異常領域を抽出する陰影異常領域抽出部51と、陰影異常領域が顔領域に占める割合が所定値よりも大きいと、入力顔画像に写っている対象者の顔にその対象者の顔の構造以外に起因する陰影が存在すると判定する陰影異常判定部52と、対象者の顔にその対象者の顔の構造以外に起因する陰影が存在しないと判定された入力顔画像を3次元顔形状データと位置合わせしてその3次元顔形状データにマッピングすることにより、対象者の3次元顔モデルを生成する3次元顔モデル生成部53とを有する。
(もっと読む)
グラフ表示装置及びプログラム
【課題】グラフの表示対象範囲を表示させつつ、見た目の煩雑化を防止するとともに、目盛間隔が変更されるのを防止する
【解決手段】関数電卓1は、表示部15と、ユーザ操作に基づいてグラフ式を入力するとともに座標系の表示対象範囲と、当該座標系における座標軸の目盛間隔とを設定するキー入力部14と、設定された表示対象範囲内の座標軸を表示部15に表示させるとともに、当該座標軸に対し、設定された目盛間隔で目盛と、目盛値とを表示させるCPU11とを備える。CPU11は、設定された座標系の表示範囲内でグラフ式のグラフを表示させるとともに、座標軸に表示されるべき目盛値の重なりを検知し、目盛値が重なる場合には、当該座標軸に表示される目盛のうち、両端の目盛についてのみ目盛値を表示させる。
(もっと読む)
立体映像調整装置及び調整方法
【課題】オクルージョン領域の推定や情報を保持することなく、ステレオ画像における前景と背景の視差量を調整する。
【解決手段】
立体映像調整装置は、複数のカメラで前景物体と背景物体が撮影され、ステレオマッチングの対応点が取られた画像に対して、前景物体が写っている画像領域と前景物体との重畳によって別の視点位置からは隠ぺいされる背景の領域を合わせた領域を通過する画像勾配の小さい領域を連結したパスを複数本取得する手段と、背景画像において画像勾配の小さい領域を連結したパスを複数本取得する手段と、それらのパス上のピクセルを削除または複製することによって、ステレオ視を行った際に前景物体と背景物体の奥行量の差が異なる疑似画像を作成する手段を備える。
(もっと読む)
配信動画をリアルタイム3DCGレンダリング上で合成するコンテンツ生成システム
【課題】
ネットワークを用いた動画配信システムによって配信された任意動画と3次元コンピュータグラフィックスを合成させたコンテンツを、ユーザがネットワーク上で手軽に配信できる、娯楽性と相互作用性の高いコンテンツ生成システムを提供する。
【解決手段】
本発明では、端末装置3はネットワークを介して動画配信サーバ1からの任意動画並びに任意ライブ動画の送受信と、形状情報配信サーバ2からの任意3次元幾何学形状情報の受信が行え、端末装置3からの任意ライブ動画配信はネットワーク4と動画配信サーバ1を介して他の端末装置3へ行うことができ、端末装置3は受信した任意動画の任意再生時間における画像を抽出し、その画像の各ピクセルに対して透過処理を施してから端末装置3でリアルタイム3次元コンピュータグラフィックスレンダリングを行う際に任意3次元幾何学形状情報のテクスチャマップとして適用することを特徴とする。
(もっと読む)
3Dメッシュ・モデルの法線をエンコードする方法、3Dメッシュ・モデルの法線をデコードする方法、エンコーダおよびデコーダ
3Dメッシュ・モデルの、法線成分としても知られる頂点配向をエンコードする方法が、法線成分の第一のクラスタリングの段階と、各第一クラスターについて、その要素の大半が属する球セクターを決定する段階と、法線成分をあらかじめ定義されたセクターにマッピングする段階と、あらかじめ定義されたセクターにおける法線成分を第二クラスターにクラスタリングし直す段階と、前記第二クラスターについての予測子を決定し、法線成分をその残差、その予測子への参照および前記ミラー・マッピング動作のどれが実行されたかを示すデータによってエンコードする段階とを含む。球セクターは、球をm個の等しい球セグメントに分割し、前記球セグメントのそれぞれをn個の等しいセクターに分割することによって得られる。セクター・マッピングのための第一のクラスタリングおよび予測符号化のための第二のクラスタリングの結果、改善された圧縮比が得られる。 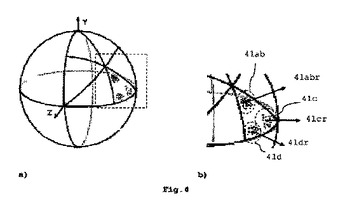 (もっと読む)
(もっと読む)
環境マップを生成する方法
発明は、現実環境の照明情報を表す環境マップを生成する方法に関する。仮想環境への没入の印象を高めることに関して、この方法は、デジタル光学式取得デバイス(22)から前記現実環境の部分照明情報を表す画像(24)をリアルタイムで取得するステップであって、前記画像が複数のピクセルを含むステップと、前記画像の前記ピクセルの少なくとも一部の外挿によって前記環境マップを推定するステップとを含む。  (もっと読む)
(もっと読む)
画像処理装置、画像データ生成装置、画像処理方法、画像データ生成方法、および画像ファイルのデータ構造
【課題】高精細な画像を表示する際、対象物の表面に凹凸感を表現する。
【解決手段】表示画像処理部114において、視差表現部124は、画素ごとに対象物の高さ情報を保持するハイトマップ132を用いて、対象物に高さがあることによって発生する、視点の移動による見え方の違いを座標のずれとして表現する。色表現部126は、視差表現部124が導出したテクスチャ座標値などを用い、カラーマップ134の画素をずらしてレンダリングを行う。この際、画素ごとに対象物表面の法線を保持する法線マップ136を用いて光の当たり具合を変化させ凹凸を表現する。影表現部128は、光源の角度によって影が生じるか否かの情報を画素ごとに保持するホライズンマップ138を用いて、色表現部126が描画した画像に影をつける。画像出力部130は、最終的な表示画像を表示処理部44のフレームメモリに描画する。
(もっと読む)
表面再現方法及び表面再現プログラム
【課題】建物や樹木といった実際の地上の構造物を対象としても正確に表面を再現することのできる表面再現方法及び表面再生プログラムを提供する。
【解決手段】複数の点からなる点群を複数の層に分割し、複数の層における複数の点に対し輪郭抽出処理を行い、輪郭抽出処理により抽出された複数の層における複数の点からなる点群を結合し、表面再現処理を行う、表面再現方法とする。また、コンピュータに、複数の点からなる点群を複数の層に分割し、複数の層における複数の点に対し輪郭抽出処理を行い、輪郭抽出処理により抽出された複数の層における複数の点からなる点群を結合し、表面再現処理を行わせるための表面再現プログラムとする。
(もっと読む)
イメージベースドビジュアルハルにおける凹状表面のモデリング
本明細書で開示される装置および方法は、オブジェクトの凹領域全体をキャプチャするためにカメラから取得された1組の参照画像および視点から取得された参照画像と、オブジェクトの凹領域のシルエット画像を取得するためのシルエット処理モジュールと、このシルエット処理モジュールに接続され、計算されたシルエット画像から凹領域の仮想逆転画像を合成し、凹領域を有するオブジェクトのビジュアルハルを生成するための仮想画像合成モジュールとを提供する。 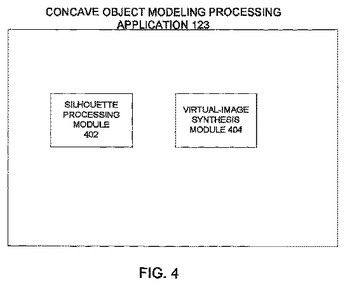 (もっと読む)
(もっと読む)
グラフィクス頂点処理装置およびグラフィクス頂点処理方法
【課題】演算器使用率を高め、高速な演算を可能とするグラフィクス頂点処理装置およびグラフィクス頂点処理方法を提供する。
【解決手段】マイクロコードRAM105は、複数の命令シーケンスを連結して、複数の命令シーケンスを並列に処理するようにマイクロ命令110を並べ替えた複合命令シーケンスを含むマイクロコード112を記憶する。FIFO型バッファ101は、演算の対象である頂点の情報と、演算の内容を識別する命令シーケンスインデクス107とを入力して記憶する。命令判断ユニット102は、FIFO型バッファ101に記憶された連続する命令シーケンスインデクスに対応して、マイクロコード112から、命令シーケンスインデクス107の連続する数に対応するマイクロコード112を選択する。演算実行ユニット106は、命令判断ユニット102で選択したマイクロコード112に従って、頂点の演算を行う。
(もっと読む)
21 - 40 / 215
[ Back to top ]